จลนศาสตร์เชิงแม่นยำ: การควบคุมหุ่นยนต์แขนกลแบบไร้สาย
หุ่นยนต์แขนกลเป็นหัวใจสำคัญของการผลิตยุคใหม่ ให้การเคลื่อนไหวที่แม่นยำผ่าน "Degrees of Freedom" (DOF) หลายระดับ โปรเจกต์นี้เชื่อมช่องว่างระหว่างการประกอบเชิงกลและซอฟต์แวร์เชิงโต้ตอบ ทำให้คุณสามารถบังคับหุ่นยนต์แขนกลแบบ 4-DOF ที่เป็นชุดคิทไม้ โดยใช้ Android application ที่สร้างขึ้นเอง และ Arduino Uno
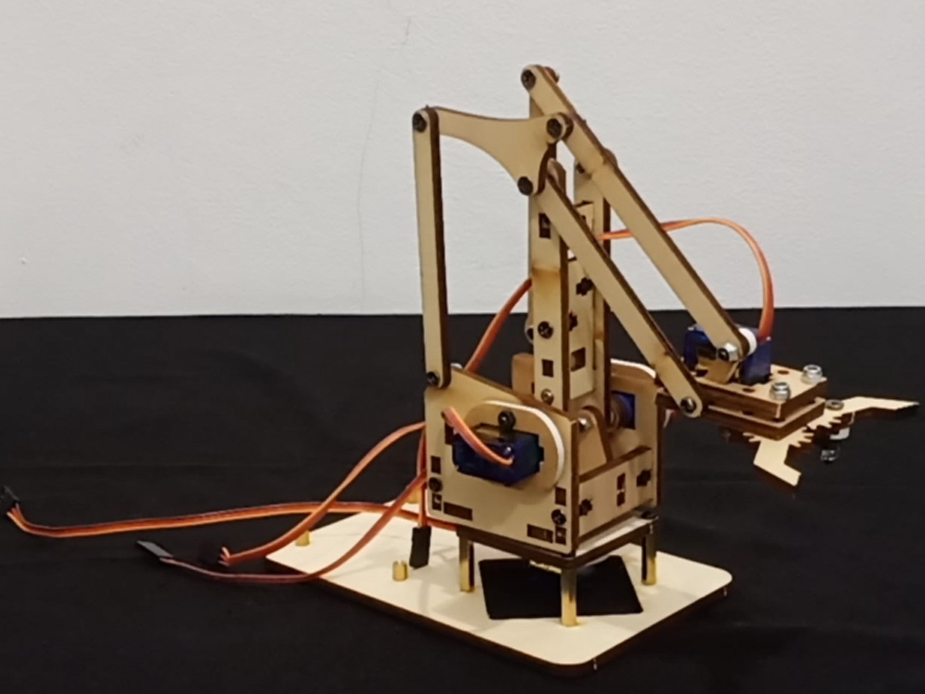
สถาปัตยกรรมกลไกแบบ 4-DOF
หุ่นยนต์แขนกลใช้ SG90 Micro-servo motors อิสระสี่ตัว เพื่อจำลองการเคลื่อนไหวแบบข้อต่อที่เหมือนมนุษย์:
- ฐาน (การหมุน): ควบคุมการวางแนวในแนวนอนของชุดแขนกลทั้งหมด
- ไหล่ (การยกขึ้น): จัดการความสูงและการเอื้อมหลัก
- ข้อศอก (การยื่นออก): ให้การเคลื่อนไหวในแนวดิ่งสำหรับการวางตำแหน่งมือหุ่นยนต์
- ตัวจับยึด (ก้ามหนีบ): "ปลายแขนกล" ที่รับผิดชอบในการหยิบและปล่อยวัตถุ
การสื่อสารแบบอนุกรมไร้สาย: การรวม HC-05
เพื่อให้สามารถควบคุมระยะไกลได้โดยไม่ต้องมีสายเชื่อมต่อทางกายภาพ โปรเจกต์นี้ใช้ HC-05 Bluetooth module
- โปรโตคอลแพ็คเก็ต: Android app จะส่งกระแสของแพ็คเก็ตข้อมูล (สตริงที่จัดรูปแบบหรือไบต์ดิบ) ที่แสดงถึงมุมที่ต้องการ (0-180 องศา) สำหรับ servo แต่ละตัว
- การแยกวิเคราะห์อนุกรม: Arduino จะรับฟังจากบัฟเฟอร์ Serial ของมัน แยกวิเคราะห์อักขระที่เข้ามา และใช้ไลบรารี
Servo.hเพื่อเขียนสัญญาณ PWM ที่แม่นยำไปยัง motor ที่เกี่ยวข้อง - การเคลื่อนไหวที่ราบรื่น: ซอฟต์แวร์มีการใช้ตรรกะการประมาณค่าในช่วง (interpolation logic) เพื่อให้แน่ใจว่า servo เคลื่อนที่ได้อย่างราบรื่น แทนที่จะกระโดดข้ามตำแหน่ง ปกป้องความสมบูรณ์ของโครงสร้างไม้
การพัฒนา Mobile App ด้วย Android Studio
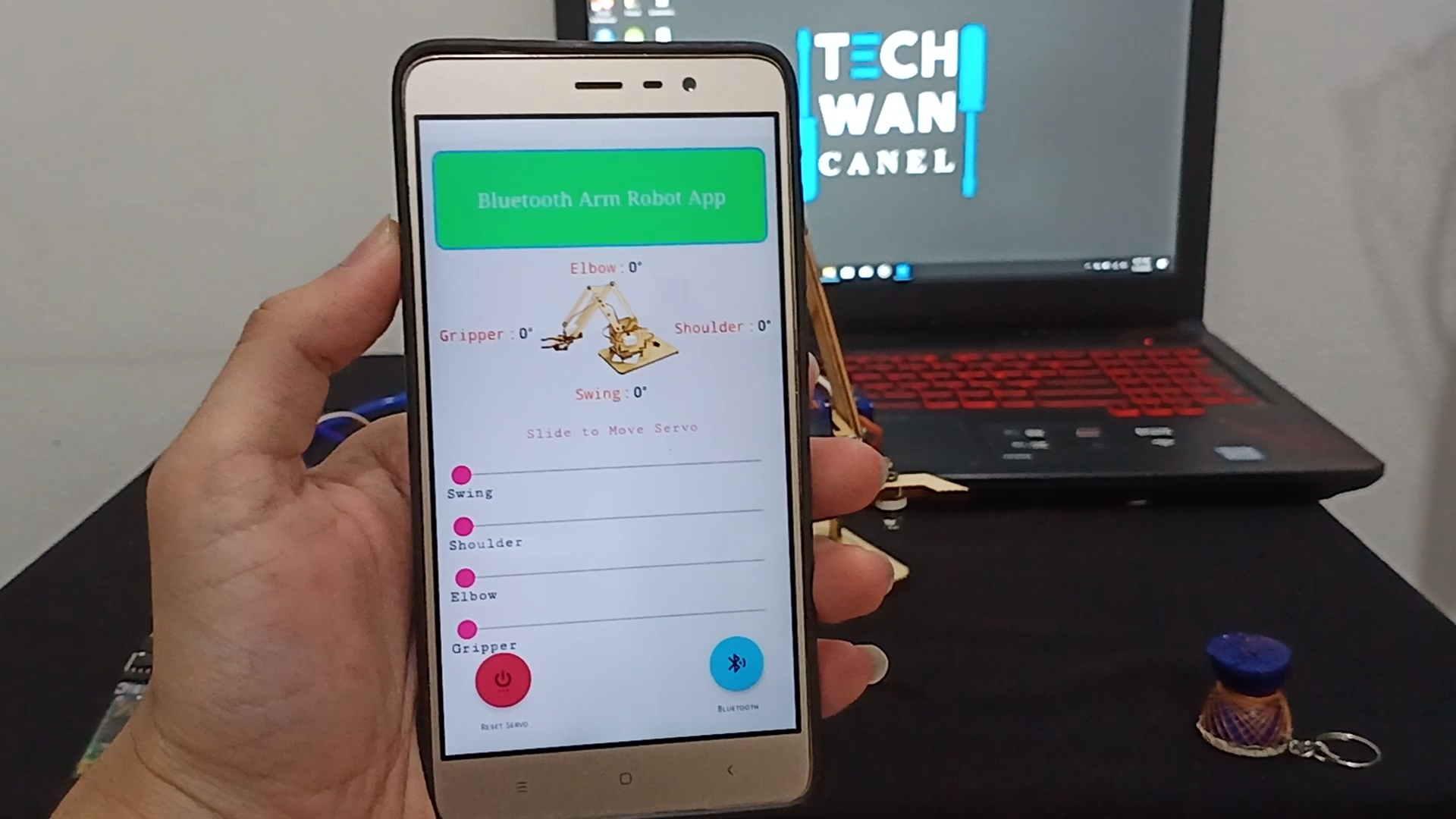
mobile app ที่ใช้ร่วมกันซึ่งพัฒนาใน Android Studio มอบส่วนต่อประสานกราฟิกสำหรับผู้ใช้ระดับมืออาชีพ โดยมี slider หรือ joystick สำหรับแต่ละแกน มันจะแปลงอินพุตการสัมผัสของผู้ใช้ให้เป็นคำสั่งดิจิทัลแบบเรียลไทม์ การรวมเข้าด้วยกันนี้ทำหน้าที่เป็นการแนะนำที่มีประสิทธิภาพในการเชื่อมต่อระหว่าง mobile และ hardware ซึ่งเป็นทักษะที่สำคัญในสาขา "Internet of Robotic Things" (IoRT) ที่กำลังขยายตัว
โดยปกติ **robot** สามารถเคลื่อนที่ได้ด้วยตัวเอง แต่บางครั้งเราก็จำเป็นต้องควบคุมมัน ในโปรเจกต์นี้ ผมจะควบคุม **arm robot** โดยใช้สมาร์ทโฟน **arm robot** มี **servo motor** ที่ถูกควบคุมผ่าน **Arduino** **Arduino** รับคำสั่งเพื่อเคลื่อนย้าย **servo** จากข้อมูลที่ส่งโดย **mobile application** เช่นเดียวกับคนที่สื่อสารจากระยะไกล เราต้องการอุปกรณ์ไร้สาย ในที่นี้ผมใช้ **Bluetooth** เพื่อให้ **Arduino** และ **mobile application** สามารถสื่อสารกันได้
ส่วนประกอบ

1. Robot Arm Kit
2. Arduino Uno Rev 3
**Arduino Uno** ใช้สำหรับโปรแกรมอินพุตจาก **PIR sensor** และส่งไปยังโทรศัพท์มือถือ
3. Bluetooth HC-05
เครื่องมือสื่อสารระหว่าง **Arduino** และ **mobile application**
4. Servo Tower Pro SG90
5. Mobile Application