การพัฒนาระบบควบคุมอัตโนมัติสำหรับเกม Chrome Dino ด้วย Arduino: ตั้งแต่ Sensor ถึงกลไกการโต้ตอบแบบ Real-time
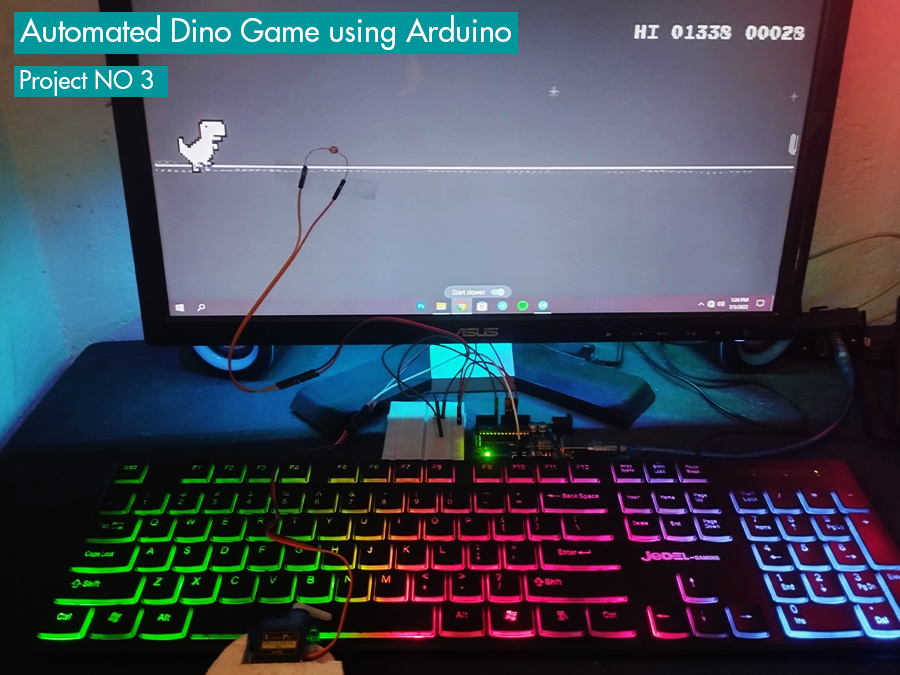
การเปลี่ยนกิจกรรมยามว่างอย่างการเล่นเกม Chrome Dino ให้เป็นโปรเจกต์วิศวกรรมขนาดเล็ก เป็นวิธีที่ยอดเยี่ยมในการเรียนรู้พื้นฐานของ Embedded Systems โปรเจกต์นี้เป็นการรวมกันระหว่าง Physical Sensing และ Mechanical Actuation เพื่อสร้างระบบ Automation ที่สมบูรณ์ โดยมีบอร์ด Arduino เป็นหัวใจหลัก


หลักการทำงานและส่วนประกอบทางเทคนิค
ระบบนี้ทำงานโดยอาศัยหลักการ "Feedback Loop" ที่เรียบง่ายแต่มีประสิทธิภาพ โดยแบ่งส่วนประกอบหลักออกเป็นสามส่วนดังนี้:
Light Dependent Resistor (LDR): LDR ทำหน้าที่เป็น "ดวงตา" ของระบบ โดยติดตั้งบนหน้าจอคอมพิวเตอร์ในตำแหน่งที่สิ่งกีดขวาง (cacti) จะเคลื่อนที่ผ่าน เมื่อหน้าจอแสดงผลเป็นสีขาว (พื้นหลังปกติ) LDR จะมีความต้านทานต่ำ อย่างไรก็ตาม เมื่อสิ่งกีดขวางสีดำเคลื่อนที่ผ่านตำแหน่งของ Sensor ความเข้มของแสงจะลดลง ทำให้ความต้านทานเพิ่มขึ้นทันที การเปลี่ยนแปลงนี้จะถูกส่งไปยัง Analog port ของ Arduino ในรูปของแรงดันไฟฟ้าที่เปลี่ยนแปลง
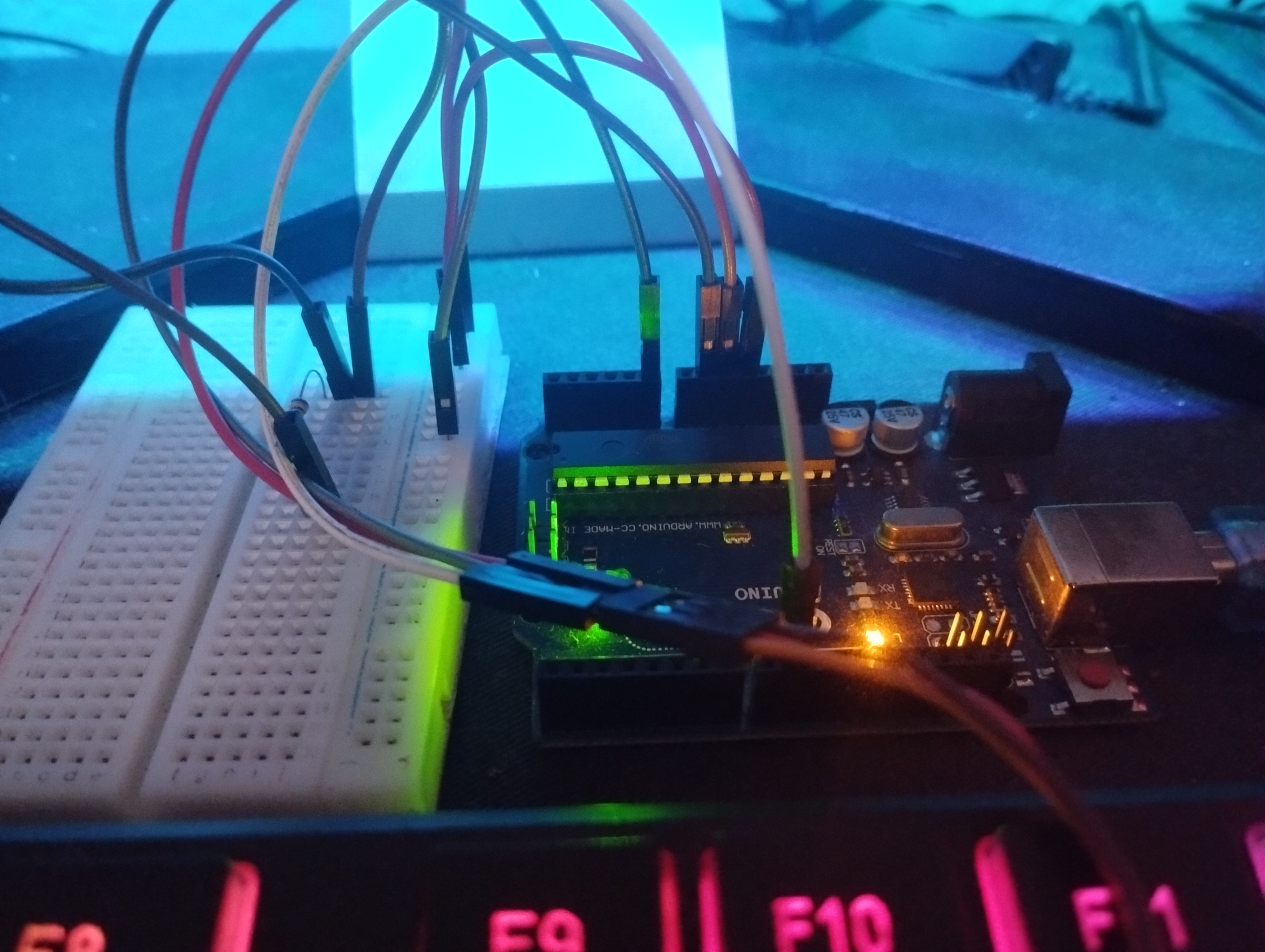
Processing Unit (Arduino Uno): บอร์ด Arduino รับ Analog signal จาก LDR และแปลงเป็น Digital value (0-1023) ผ่านวงจร ADC (Analog-to-Digital Converter) จากนั้นโปรแกรมจะเปรียบเทียบค่าที่อ่านได้กับ Threshold ที่ตั้งไว้ล่วงหน้า หากค่าแสงลดลงต่ำกว่า Threshold ที่กำหนด ระบบจะตีความว่า "ตรวจพบสิ่งกีดขวาง" และส่งคำสั่งไปยัง Servo Motor ทันที
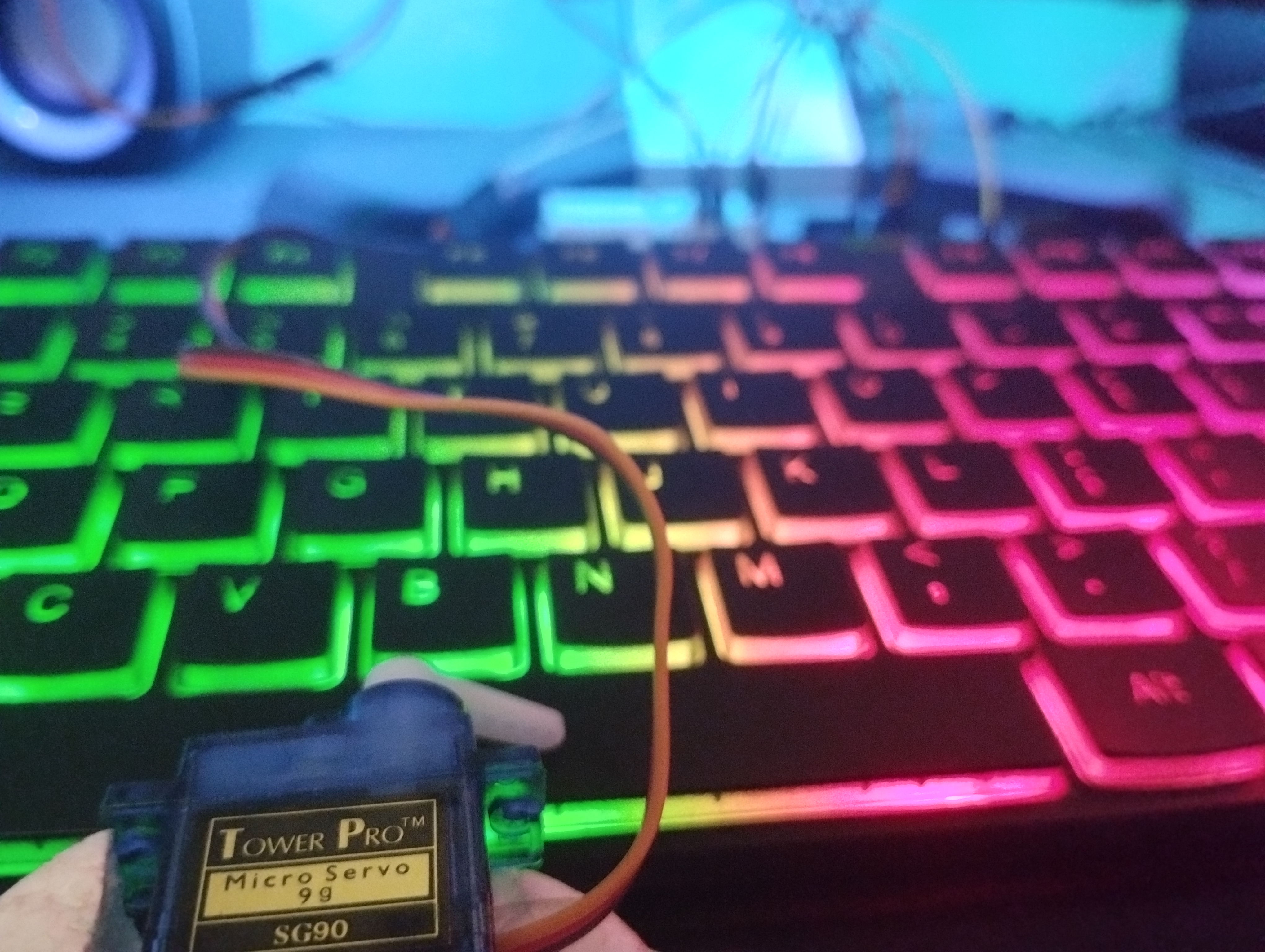
Servo Motor: นี่ทำหน้าที่เป็น "นิ้ว" กลไก โดย Servo ถูกตั้งโปรแกรมให้หมุนไปยังมุมที่กำหนดเพื่อกดปุ่ม Spacebar บนคีย์บอร์ด เมื่อคำสั่งเสร็จสมบูรณ์ Servo จะหมุนกลับสู่ตำแหน่งเดิม เพื่อเตรียมพร้อมสำหรับการกระโดดครั้งต่อไป
การวิเคราะห์ตรรกะของ Software
โครงสร้างโค้ดโปรแกรมเน้น Low Latency เพื่อให้ทันกับความเร็วของเกมที่เพิ่มขึ้น:
- Calibration Phase: เมื่อเริ่มต้นทำงาน ระบบจะอ่านค่าความสว่างเฉลี่ยของหน้าจอเพื่อกำหนดค่าอ้างอิง
- Detection Loop: ภายใน
void loop()โปรแกรมจะตรวจสอบค่าจากanalogRead(LDR_PIN)อย่างต่อเนื่อง หากค่าที่อ่านได้เบี่ยงเบนจากค่าอ้างอิงเกินกว่า Sensitivity ที่ตั้งไว้ เงื่อนไขการทำงานจะถูกบรรลุ - Action Execution: เมื่อเงื่อนไขเป็นจริง คำสั่ง
servo.write(targetAngle)จะถูกเรียกใช้เพื่อทำการกระโดด ฟังก์ชันdelay()ที่สั้นมากจะถูกใช้เพื่อให้ Servo มีเวลาเคลื่อนที่ แต่ไม่นานจนระบบพลาดสิ่งกีดขวางถัดไป
แผนภาพวงจรและโครงสร้าง: คุณสามารถศึกษาการเชื่อมต่อสายไฟและการจัดวางส่วนประกอบโดยละเอียดได้ที่นี่: แผนภาพวงจร
บทสรุปและการพัฒนาต่อยอด
โปรเจกต์เกม Dino อัตโนมัติชิ้นนี้แสดงให้เห็นถึงพลังของ Arduino ในการแก้ปัญหาการโต้ตอบแบบ Real-world แม้จะเป็นเพียงแค่เกม แต่หลักการเดียวกันนี้สามารถนำไปประยุกต์ใช้ในงานอุตสาหกรรมได้ เช่น ระบบนับผลิตภัณฑ์บนสายพานลำเลียง หรือระบบตรวจจับความผิดปกติของสีในกระบวนการผลิต
ขอบคุณที่ติดตามโปรเจกต์ที่สามของผม หากคุณสนใจใน Physical Computing โปรเจกต์นี้จะเป็นจุดเริ่มต้นที่ดีเยี่ยมสำหรับการฝึกฝนทักษะการปรับแต่ง Sensor และการควบคุม Motor
Hashan Sudeera