Automated Railway Reverse Loop
หนึ่งในปริศนาที่นักสร้างแบบจำลองรถไฟบางคนเผชิญคือ "reverse loop" ซึ่งหมายถึงส่วนหนึ่งของรางรถไฟที่ก่อตัวเป็นวงกลมสมบูรณ์ เพื่อให้รถไฟวิ่งวนกลับมาในทิศทางตรงกันข้ามบนรางชุดเดิม
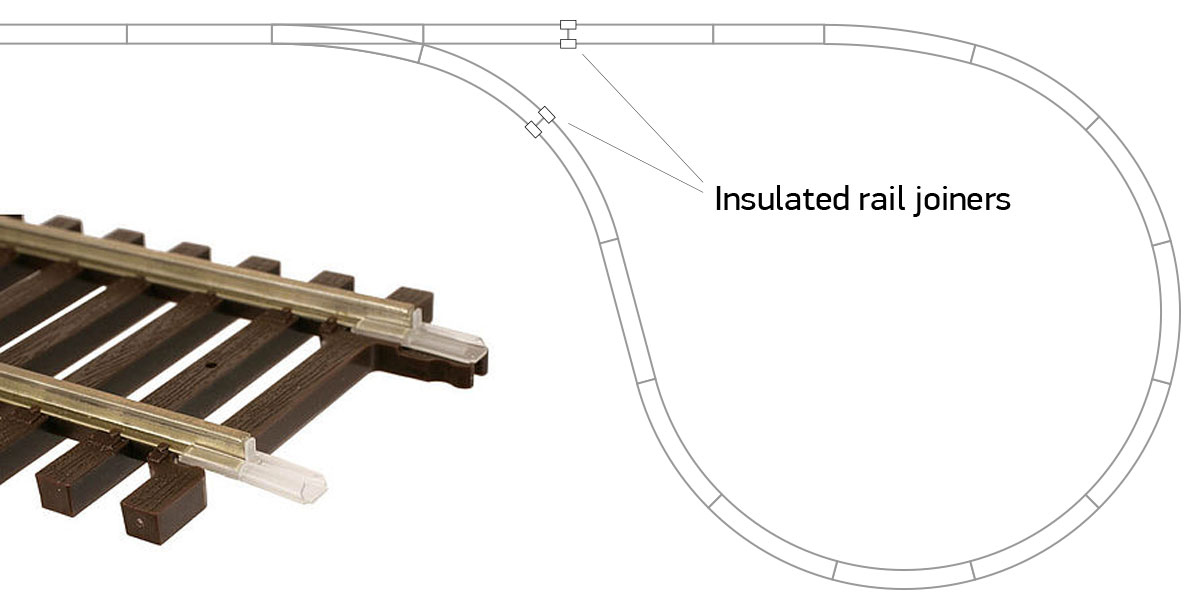
ปัญหาหลักเมื่อพยายามทำสิ่งนี้คือข้อเท็จจริงที่ว่า loop ทำให้เกิด short circuit บนราง ซึ่งสามารถป้องกันได้โดยการทำรอยแยกในแต่ละราง
รถไฟบน reverse loops ถูกควบคุมโดย manual switches และ/หรือ throttle lever ที่ถูกปรับแต่ง ผู้ควบคุมรถไฟต้องพลิกสวิตช์เหล่านี้ตามลำดับที่ถูกต้อง การไม่ระมัดระวังเพียงชั่วขณะอาจส่งผลให้เกิด short circuit หรือรถไฟตกราง ซึ่งมีแนวโน้มที่จะเกิดขึ้นได้ง่าย (และน่าอับอาย) โดยเฉพาะอย่างยิ่งเมื่อแสดงแบบจำลองให้ผู้เยี่ยมชมชม
สำหรับระบบควบคุมรถไฟแบบ DCC railway control systems มี auto-reverse module แต่สำหรับ DC control systems ยังไม่มีสิ่งอำนวยความสะดวกเช่นนั้น คำแนะนำนี้เป็นอีกหนึ่งความพยายามที่จะสร้างอุปกรณ์ดังกล่าว
ทางเข้าทิศทางเดียว
มีหลายทางเลือกสำหรับการผ่าน reverse loop คำแนะนำของฉันนำเสนอทางเลือกดังต่อไปนี้ – รถไฟเข้าสู่ loop ในทิศทางเดียวเท่านั้น

คุณสามารถเปลี่ยนความเร็วและทิศทางของรถไฟภายใน loop และแม้กระทั่งหยุดมัน ข้อจำกัดเพียงอย่างเดียวของตัวเลือกนี้คือรถไฟของคุณจะต้องผ่านจากจุด C ไปยังจุด A โดยไม่เปลี่ยนทิศทาง และตู้สุดท้ายของรถไฟจะต้องเคลื่อนที่ไปตามระยะทางนี้ก่อนที่เวลา countdown จะหมดลง
IR sensor
วิธีการปรับแต่ง infrared module มาตรฐานสำหรับ Arduino แสดงอยู่ในวิดีโอ หลังจากการปรับแต่งนี้ สัญญาณ trigger ของ sensor จะถูก invert ขึ้นไปเป็นระดับ HIGH
Switch Machine
ULN2003 chip ใช้สำหรับควบคุม turnout แต่คุณสามารถใช้ stepper motor control module แบบสำเร็จรูปก็ได้ วิธีการเชื่อมต่อเหมือนกันทุกประการ
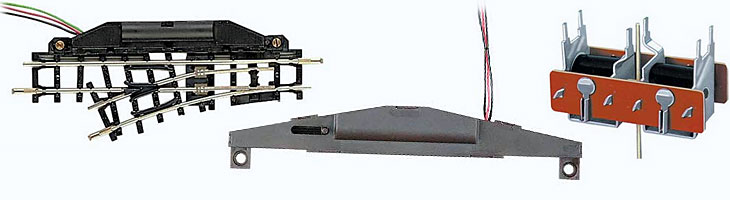
classic switch machine สำหรับเปลี่ยนทิศทางของ turnout จะเชื่อมต่อกับ output ของ chip นี้ switch machines บางรุ่น โดยเฉพาะรุ่นเก่า อาจต้องเพิ่มแรงดันไฟฟ้าเป็น 14 - 16 volts ในการเพิ่มแรงดันไฟฟ้า คุณสามารถใช้ DC-DC Voltage Step-Up Converter Module สำหรับ Arduino ได้
ระบบควบคุม
คู่มือนี้ใช้การควบคุมรถไฟผ่าน Arduino Train DEMO 2 mobile app
หากคุณเชื่อมต่อสายไฟไม่ผิดพลาด ผลลัพธ์ของคุณจะคล้ายกับที่นำเสนอในวิดีโอ
อัปเดต 4/18/19
แอปพลิเคชันฟรีได้รับการอัปเดตเป็นเวอร์ชัน 2 แอปพลิเคชันรองรับ data transfer Protocol เวอร์ชัน 2.1 ซึ่งหมายถึง 9-step traction control
รายละเอียดทางเทคนิคเพิ่มเติม
Model Railroad Power Logic Matrix
โซลูชันทางเทคนิคสำหรับปัญหาคลาสสิกของแบบจำลองรถไฟ: การจัดการ electrical polarity ของ "Reverse Loop" โดยไม่ทำให้เกิด short circuit
- Optical Train Sensing: มี IR break-beam sensors ที่ทางเข้าและทางออกของ loop ตัว Arduino จะติดตามตำแหน่งของรถไฟขณะที่เข้าสู่ส่วนรางวงกลม
- Automatic Polarity Flip Control: จัดการ DPDT (Double-Pole Double-Throw) relay ก่อนที่รถไฟจะออกจาก loop เล็กน้อย Arduino จะทำการ flip relay เพื่อให้เข้ากับ main-line polarity ทำให้รถไฟสามารถออกจาก loop ได้อย่างราบรื่น
ประสิทธิภาพ
- Verified with Arduino IDE: เขียนโค้ดด้วย "Safe-Buffer" delay เพื่อให้แน่ใจว่าการ flip relay เกิดขึ้นอย่างแม่นยำในช่องว่างระหว่าง wheel-sets ของรถไฟ ป้องกันไม่ให้เกิด arcing หรือ motor stutters