แรงจูงใจ: ทำความเข้าใจ "แก่นแท้" ของโดรน
คุณเคยสงสัยไหมว่าโดรนสามารถลอยตัวอยู่ในอากาศได้อย่างไร หรือประสานงานมอเตอร์ทั้งสี่ตัวเพื่อทำการตีลังกาที่ซับซ้อนได้อย่างไร? โดรนสำเร็จรูปส่วนใหญ่ซ่อนความซับซ้อนนี้ไว้เบื้องหลังโครงพลาสติกที่สวยงามและซอฟต์แวร์ที่เป็นกรรมสิทธิ์ โปรเจกต์ BareMetalDrone ได้รับการออกแบบมาเพื่อเปิดเผยชั้นความซับซ้อนเหล่านั้น
เป้าหมายคือการสร้าง quadcopter ตั้งแต่เริ่มต้น โดยเริ่มจากส่วนประกอบอิเล็กทรอนิกส์แต่ละชิ้นบน breadboard และในที่สุดจะย้ายไปยัง custom PCB shields สำหรับ Arduino Uno วิธีการแบบ "bare metal" นี้ช่วยให้คุณเข้าใจทุกคำสั่ง firmware ระดับต่ำ และทุก algorithm การทำงานระดับสูงที่จำเป็นสำหรับการบิน
แผนผังทางสถาปัตยกรรม: การบินแบบโมดูลาร์
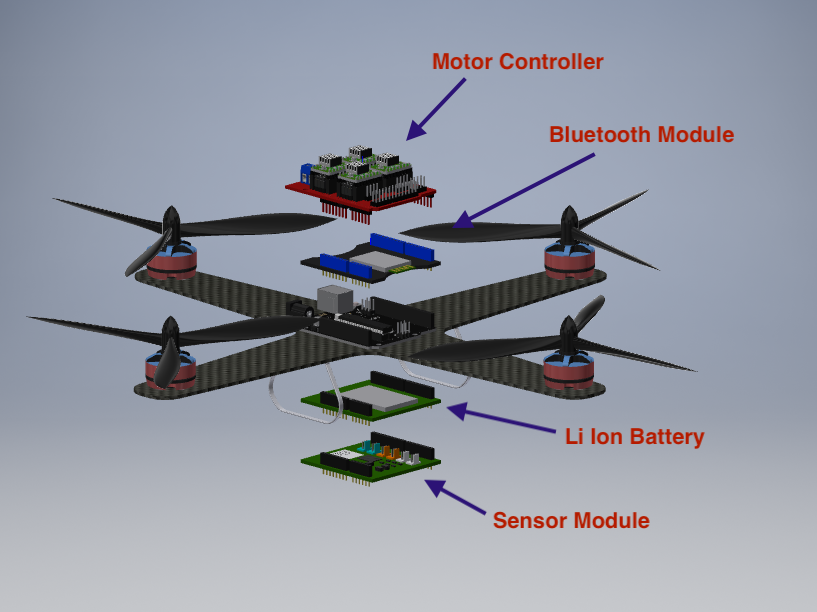
BareMetalDrone ถูกออกแบบให้เป็นชุดของโมดูลเฉพาะทาง โดยแต่ละโมดูลมีหน้าที่สำคัญในระบบนิเวศของโดรน การออกแบบและจัดวางแต่ละโมดูลบน breadboard แยกกัน ทำให้โปรเจกต์สามารถจัดการได้ง่ายสำหรับผู้เรียน STEM
1. Sensor Shield (หูชั้นใน)
ในการบิน โดรนต้องรู้ทิศทางของตัวเอง โมดูลนี้ใช้ Inertial Measurement Unit (IMU) ซึ่งโดยทั่วไปจะประกอบด้วย 3-axis Accelerometer และ 3-axis Gyroscope Arduino ต้องทำการคำนวณด้วยความเร็วสูง (มักใช้ Kalman filter หรือ Complementary filter) เพื่อรวมข้อมูล raw sensor เหล่านี้ให้กลายเป็นค่า Pitch, Roll และ Yaw ที่เสถียร
2. Motor Controller & ESCs (กล้ามเนื้อ)
พินของ Arduino มาตรฐานไม่สามารถให้กระแสไฟสูงที่จำเป็นในการขับเคลื่อน brushless motors ได้ โมดูล Motor Controller แปลงสัญญาณ PWM พลังงานต่ำจาก Arduino ให้เป็นพัลส์พลังงานสูงที่ Electronic Speed Controllers (ESCs) ใช้ในการหมุนมอเตอร์ด้วย RPMs ที่แม่นยำ
3. Bluetooth Module (ระบบประสาท)
การสื่อสารเป็นกุญแจสำคัญสำหรับการควบคุมระยะไกล แทนที่จะใช้ shield สำเร็จรูป โปรเจกต์นี้จะจัดวางวงจร Bluetooth บน breadboard ตั้งแต่เริ่มต้น เพื่อสอนผู้ใช้ถึงวิธีการจัดการ Serial communication protocols และการแยกวิเคราะห์คำสั่งที่เข้ามาจาก smartphone หรือ custom remote
4. Power Management (หัวใจ)
จำเป็นต้องมี Li-Ion Battery Module ความจุสูงเพื่อจ่ายกระแสไฟแบบ "burst" สำหรับการบินขึ้น ขั้นตอนนี้เกี่ยวข้องกับการทำความเข้าใจ voltage regulation และการรับรองการจ่ายไฟ 5V ที่เสถียรสำหรับ Arduino logic ในขณะที่จ่ายไฟ raw 11.1V (หรือสูงกว่า) ไปยังมอเตอร์
ตรรกะหลักของ Arduino: Flight Controller
หัวใจสำคัญของทั้งหมดคือ Arduino Uno ที่รัน Flight Control Software ซอฟต์แวร์นี้ใช้ PID (Proportional-Integral-Derivative) Control Loop PID loop จะเปรียบเทียบ desired orientation (จากนักบิน) กับ actual orientation (จาก sensors) อย่างต่อเนื่อง และปรับความเร็วของมอเตอร์แต่ละตัวหลายร้อยครั้งต่อวินาทีเพื่อลดข้อผิดพลาด
แผนงานในอนาคต: จากการบินขึ้นสู่การบินอัตโนมัติ
ในขณะที่เป้าหมายเริ่มต้นคือการบินขึ้นในแนวดิ่งและการลอยตัวแบบง่ายๆ แพลตฟอร์ม BareMetalDrone สามารถขยายได้ โมดูลในอนาคตอาจรวมถึง:
- GPS Module: สำหรับการนำทางด้วย waypoint และฟังก์ชัน "Return to Home"
- Camera & Computer Vision: สำหรับการหลีกเลี่ยงสิ่งกีดขวางและการติดตามภาพ
- Ultrasonic Sensors: สำหรับการรักษาความสูงที่แม่นยำใกล้พื้นดิน
โปรเจกต์นี้ไม่ใช่แค่การสร้างของเล่นเท่านั้น แต่เป็นการเรียนรู้ความสัมพันธ์กันระหว่าง mechanical engineering, aerospace physics และ embedded programming