มาสร้างเครื่องยิงแบบกวนๆ ด้วย Arduino กันเถอะ!
โปรเจกต์นี้คือการเปิดประตูสู่โลกหุ่นยนต์และ Arduino แบบเบาๆ เอาแบบว่า... จะเรียนฟิสิกส์ก็ต้องสนุกสิ! เลยหยิบเอาเครื่องยิง (Catapult) โครงงานคลาสสิกมาประยุกต์ให้มันขยับแบบสายพานหวด (belt whip) ซะเลย
หลักการทางเทคนิค: การโหลดแรงดึงและการทริกเกอร์เซอร์โว
โปรเจกต์นี้เผยให้เห็นกลไกซ่อนเร้นของการเปลี่ยนการเคลื่อนไหวธรรมดาให้เป็นการหวดอย่างมีพลัง หัวใจหลักคือ Arduino Uno ที่ทำหน้าที่เป็นสมองของระบบ คอยจัดการเรื่องไทม์มิ่งระดับสูงและประสานงานขั้นตอนการยิงทั้งหมด มันใช้พินดิจิทัลในการส่งสัญญาณควบคุมที่แม่นยำ
การขับเคลื่อนหลักอยู่ที่สองส่วนนี้:
- เซอร์โวแรงบิดสูง MG996R ทำหน้าที่ "จับ/ปล่อย" แบบมีฟีดแบ็กทางกลไกที่เสถียร มักจะหมุนระหว่าง 0 ถึง 90 องศาเพื่อล็อกหรือปล่อยแขนเครื่องยิง
- ไดรเวอร์มอเตอร์ L298N เป็นแหล่งจ่ายไฟกระแสสูงที่เสถียรสำหรับมอเตอร์สว่าน ที่ใช้ดึงแขนกลับมาเตรียมยิงใหม่
โค้ด Arduino ใช้ตรรกะแบบ "State Machine" ในการตีความลำดับการยิง และจับคู่สถานะของมอเตอร์กับเซอร์โวให้ทำงานประสานกันอย่างปลอดภัยและเป็นจังหวะ สถานะการทำงานจะถูกส่งไปที่ Serial Monitor เพื่อใช้ในการปรับแต่งและตรวจสอบ
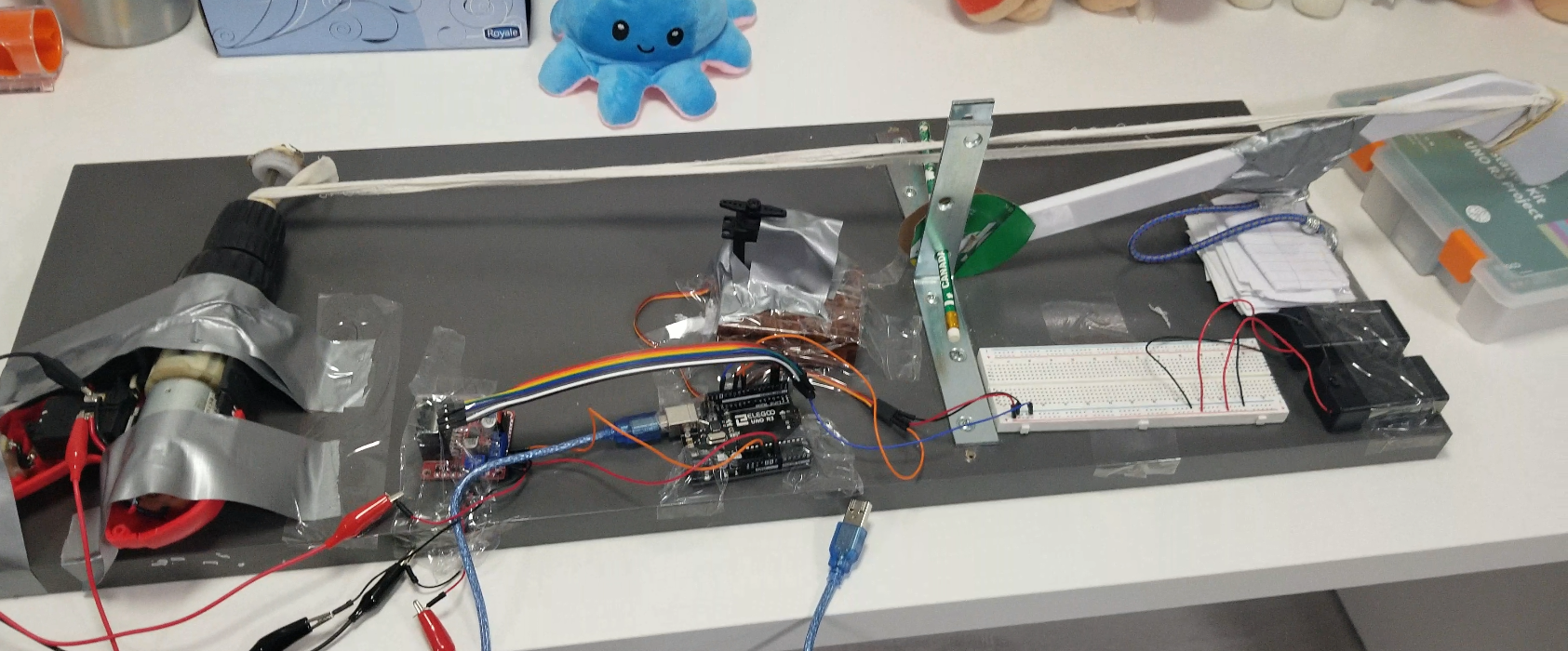
โครงสร้างพื้นฐานฮาร์ดแวร์-หุ่นยนต์
- Arduino Uno: ตัวควบคุมหลัก
- เซอร์โว MG996R: กลไกปล่อยแบบแม่นยำสูง
- ไดรเวอร์ L298N: อินเทอร์เฟซจ่ายไฟกำลังสูงสำหรับสว่าน
- ยางยืด (Bungee Cords): แหล่งสะสมพลังงานแบบประหยัดสำหรับแต่ละครั้งที่ยิง
- มอเตอร์สว่าน: แหล่งกำเนิดแรงกายภาพสำหรับดึงแขนกลับมาที่ตำแหน่งเริ่มต้น
- สาย Micro-USB: สำหรับโปรแกรมและจ่ายไฟให้ Arduino
ลงมือสร้างและทำให้เครื่องยิงทำงานอัตโนมัติ
เริ่มต้นโปรเจกต์ด้วยการสร้างเครื่องยิงแบบไม่มีอิเล็กทรอนิกส์ก่อน เพราะนี่จะเป็นตัวแทนการเคลื่อนไหวของหุ่นยนต์เรา มีหลายวิธีที่จะสร้างเครื่องยิง แต่พี่เลือกวิธีง่ายๆ โดยใช้ชั้นหนังสือแล้วเจาะยึดด้วยเหล็กฉาก (L bracket) จากนั้นก็เอาแท่งอะไรก็ได้ที่ตรงๆ เช่น ตะเกียบ ท่อพลาสติก หรือดินสอ สอดผ่านรูที่เจาะไว้เพื่อทำหน้าที่เป็นจุดหมุน (fulcrum) ระหว่างเหล็กฉากสองอันนั้น ก็คือแขนของเครื่องยิงนั่นเอง พี่ใช้ไม้ฮอกกี้
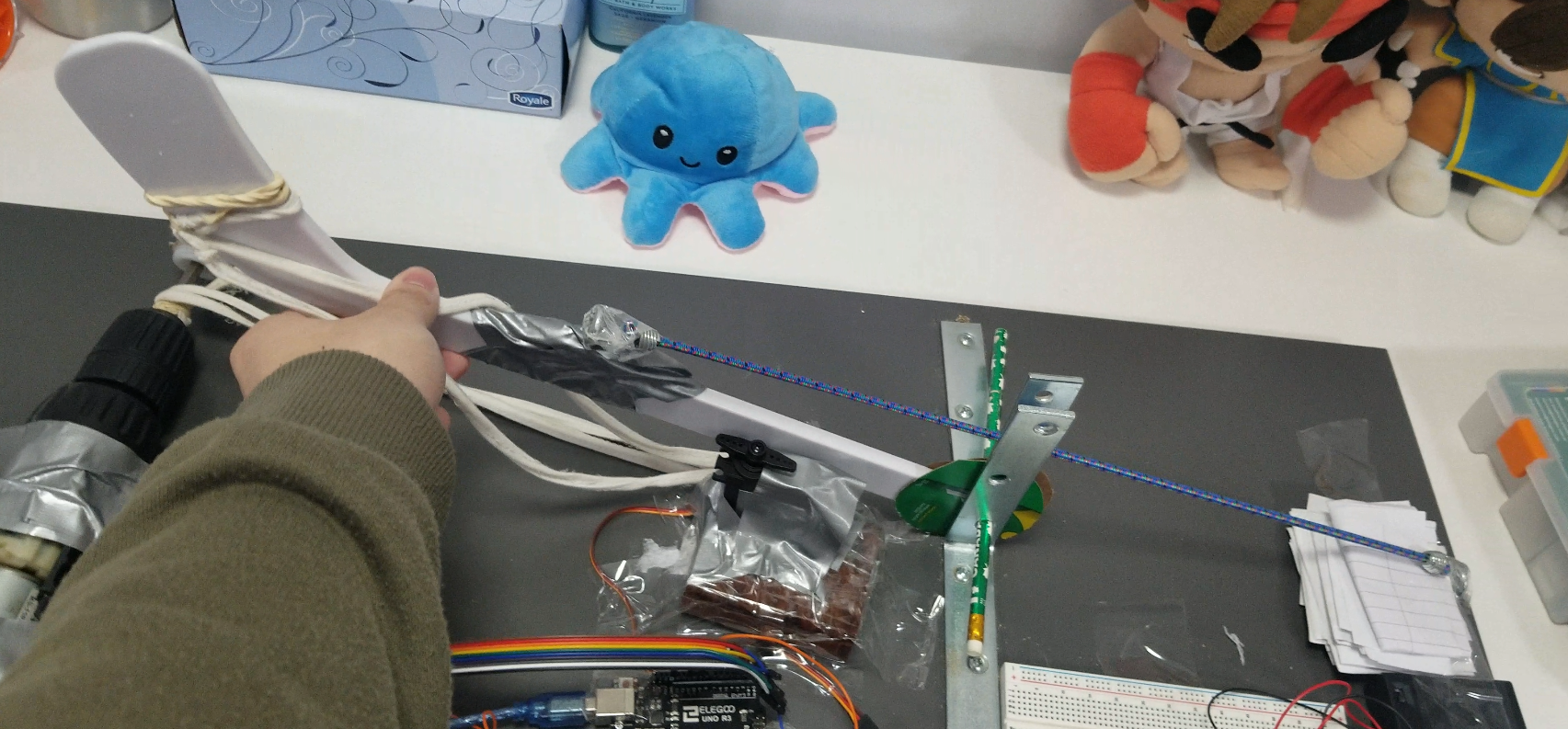
มาถึงส่วนสนุกของการยิงแล้ว! การเคลื่อนไหวเพื่อยิงทำได้โดยใช้ตะขอเกี่ยว (eye hook) 2 ตัว ตัวหนึ่งเจาะติดที่ปลายชั้นหนังสือ อีกตัวเจาะติดที่แขน จากนั้นก็ใช้ยางยืดเกี่ยวระหว่างตะขอทั้งสอง ซึ่งยางยืดนี่แหละเหมาะมากสำหรับงานนี้
หลังจากนี้ น้องก็ควรจะสามารถยิงเครื่องยิงได้ตามใจชอบแล้ว มันแรงกว่าที่พี่คิดไว้เยอะเลย! และแน่นอน ยิ่งเพิ่มแรงดึง/เพิ่มยางยืด มันก็ยิ่งแรงขึ้น ตอนนี้ก็มาถึงขั้นตอนทำให้มันทำงานอัตโนมัติ ทั้งการดึงกลับและการยิง
กระบวนการอัตโนมัติของเครื่องยิงแบบสายพานหวดนี้ออกแบบมาให้ใช้ง่าย:
- เตรียมพื้นที่ทำงาน: ติดตั้งสว่านและเซอร์โวบนโครงเครื่องยิงให้ถูกต้อง แล้วเชื่อมต่อเข้ากับ Arduino ผ่านไดรเวอร์ L298N และพินเซอร์โว
- ตั้งค่าการซิงค์เอาต์พุต: ในสเก็ตช์ Arduino ให้เริ่มต้นฟังก์ชัน
servo.attach()และกำหนดเวลาในการดึงของมอเตอร์ในรูทีนsetup() - ลูปทำงานภายใน: ระบบจะตรวจสอบเวลาและอัปเดตสถานะแบบเรียลไทม์อย่างต่อเนื่อง ตามตรรกะลำดับการยิง
- ฟีดแบ็กภาพและข้อมูล: น้องสามารถดูการทำงานของระบบและตรวจสอบสถานะผ่าน Serial Monitor ที่จะแสดงข้อมูลอัปเดตเป็นจังหวะ
จัดไปวัยรุ่น! ลุยสร้างเลย แล้วเจอกันในคลิปวิดีโอ สู้งานนะน้อง!
เพื่อรีเซ็ตเครื่องยิงกลับไปตำแหน่งเริ่มต้น พี่ใช้สว่านไฟฟ้าที่ควบคุมด้วยไดรเวอร์มอเตอร์ L298N แต่น้องจะใช้อะไรก็ได้ที่เป็นมอเตอร์ DC แรงดีๆ พอจะดึงของหนักได้ วิธีการก็คือเอาเชือกผูกจากสว่านไปติดกับไม้ฮอกกี้ สว่านก็จะดึงเครื่องยิงกลับมาอยู่ในตำแหน่ง "พร้อมยิง" แต่เดี๋ยวก่อน! ก่อนจะยิง เราต้องปล่อยแรงดึงบนเชือกก่อน ไม่งั้นสว่านจะบินตามไปด้วยนะตัวนี้
เลยต้องใช้เซอร์โวมอเตอร์มาคอยจับไม้ฮอกกี้ไว้ ในตอนที่สว่านปล่อยแรงดึงเชือก พอเสร็จขั้นตอนนี้ เครื่องยิงก็พร้อมยิงแล้ว เซอร์โวจะหมุนเพื่อปล่อยตัวยิงและตีสายพานให้สุดแรง!
ทำขั้นตอนนี้ซ้ำได้เรื่อยๆ เพื่อการลงโทษที่ต่อเนื่องไม่มีสะดุด ;)
ถ้ายังงงๆ ว่ามันประกอบกันยังไง ลองดูคลิปสั้นๆ นี้เลย:
ไอเดียต่อยอดในอนาคต
- OLED Identity Dashboard Integration: เอา OLED จอเล็กๆ มาติดที่ฐาน เพื่อแสดง "จำนวนครั้งที่ยิง" หรือ "แบตเตอรี่ %"
- Multi-sensor Sync: ต่ออัลตราโซนิกเซนเซอร์เพื่อทำ "การตรวจจับเป้าหมาย" ที่แม่นยำขึ้น
- Cloud Interface: ทำเว็บแดชบอร์ดที่เข้าถึงผ่านมือถือด้วย WiFi/BT เพื่อติดตามและบันทึกประวัติการยิงทั้งหมดแบบเป๊ะๆ
- Advanced Velocity Customization: เพิ่มโค้ดให้ปรับจังหวะการปล่อยได้อัตโนมัติ เพื่อความเร็วในการยิงที่พี่ตั้งเอง!
Belt Whip Catapult Robot เป็นโปรเจกต์ที่เพอร์เฟกต์สำหรับสายวิทย์ที่อยากได้เครื่องมือหุ่นยนต์แบบอินเทอร์แอคทีฟและสนุกกว่าเดิม! จัดไปวัยรุ่น
[!IMPORTANT] มอเตอร์สว่าน ตัวนี้กินกระแสสูงมาก! ต้องใช้ แบตเตอรี่ภายนอก (เช่น 12V) ผ่านไดรเวอร์ L298N เท่านั้น ห้ามต่อตรงกับ Arduino เด็ดขาด ไม่งั้นไหม้แน่นอน! ห้ามช็อตนะตัวนี้