ชื่อโปรเจกต์: หุ่นยนต์หลีกเลี่ยงสิ่งกีดขวางควบคุมด้วย Bluetooth
เนื้อหาภาษาไทย:
โปรเจกต์นี้ใช้โทรศัพท์มือถือในการสื่อสารกับหุ่นยนต์ผ่าน Bluetooth ผมอยากสร้างหุ่นยนต์และควบคุมมันด้วยโทรศัพท์มือถือมาโดยตลอด หลังจากหยุดพักไปนานกว่า 12 ปี ผมก็เริ่มลงมือสร้างและควบคุมหุ่นยนต์ตัวนี้ นี่เป็นโปรเจกต์แรกของผมใน Arduino Project Hub ด้วยเช่นกัน อิเล็กทรอนิกส์และหุ่นยนต์เป็นงานอดิเรกที่ผมชื่นชอบ ผมจึงได้สร้างหุ่นยนต์ตัวนี้ในช่วงล็อกดาวน์เนื่องจาก Covid19 ครับ
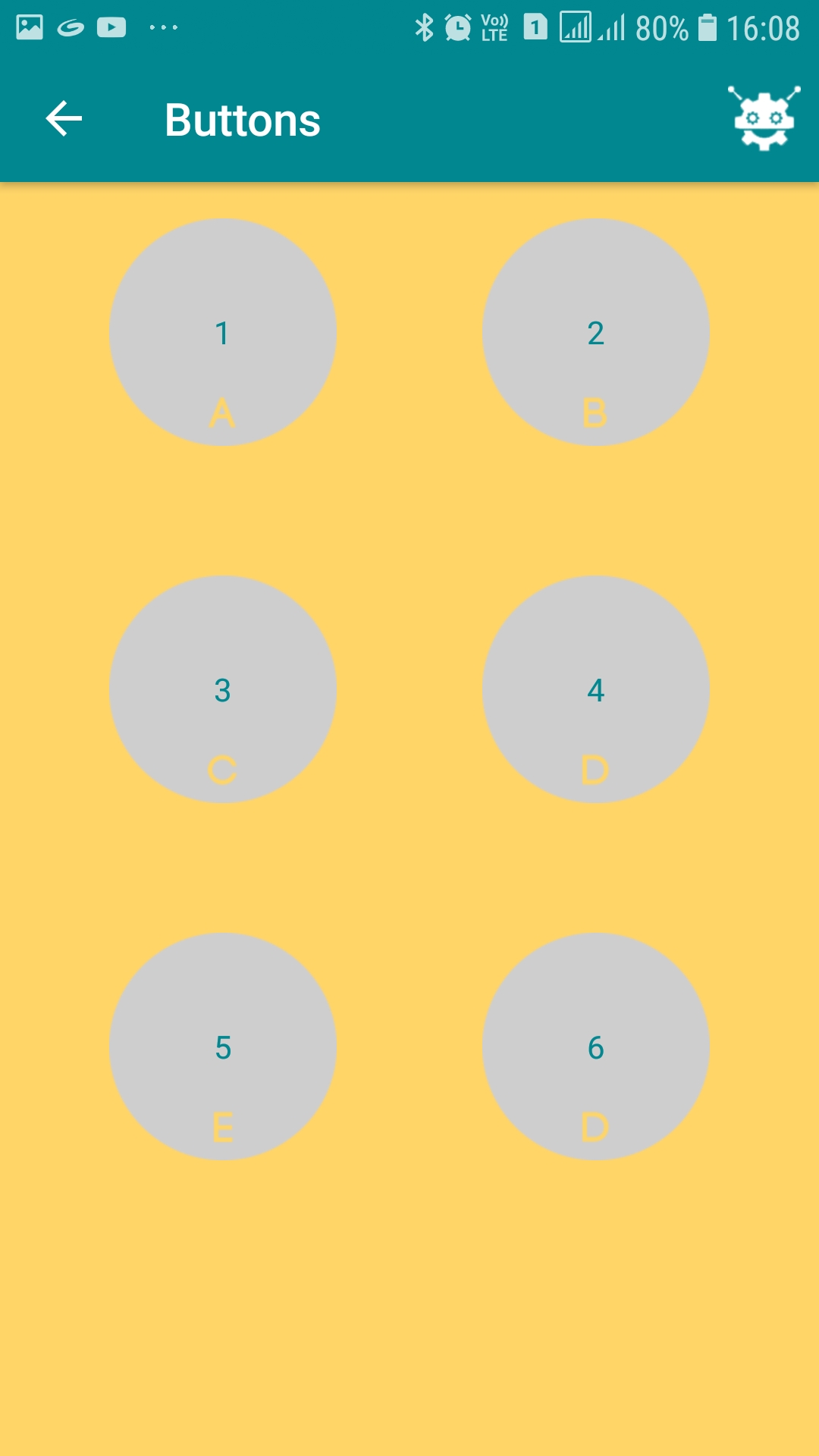
หุ่นยนต์จะตรวจจับสัญญาณ Bluetooth ที่ส่งมาจากโทรศัพท์มือถือ มันใช้โมดูล Bluetooth HC-05 เพื่อตรวจจับสัญญาณคำสั่งจากโทรศัพท์มือถือและควบคุมหุ่นยนต์ ผมใช้แอป ArduinoBlueControl เพื่อควบคุมหุ่นยนต์


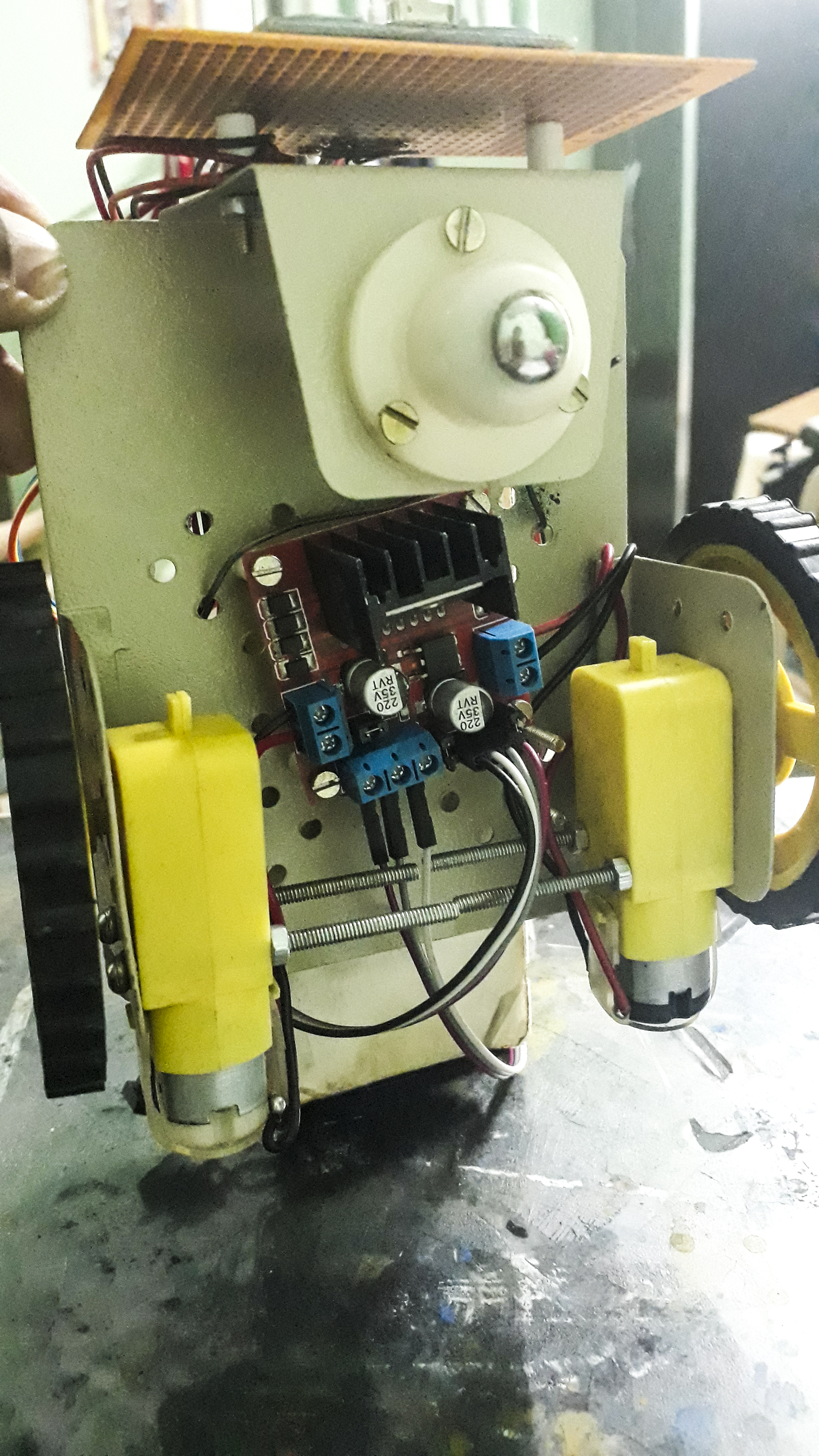
หัวใจของหุ่นยนต์คือ Arduino Nano มันรับสัญญาณจากโมดูล HC-05 ผ่านการสื่อสารแบบ serial และควบคุมมอเตอร์ผ่านโมดูล L298N motor driver สำหรับการเคลื่อนที่ไปข้างหน้า ถอยหลัง เลี้ยวซ้าย และเลี้ยวขวา

ควรระมัดระวังในการเชื่อมต่อขา TX และ RX ของโมดูล HC-05 เข้ากับ Arduino Nano โดยใช้ logic level converter
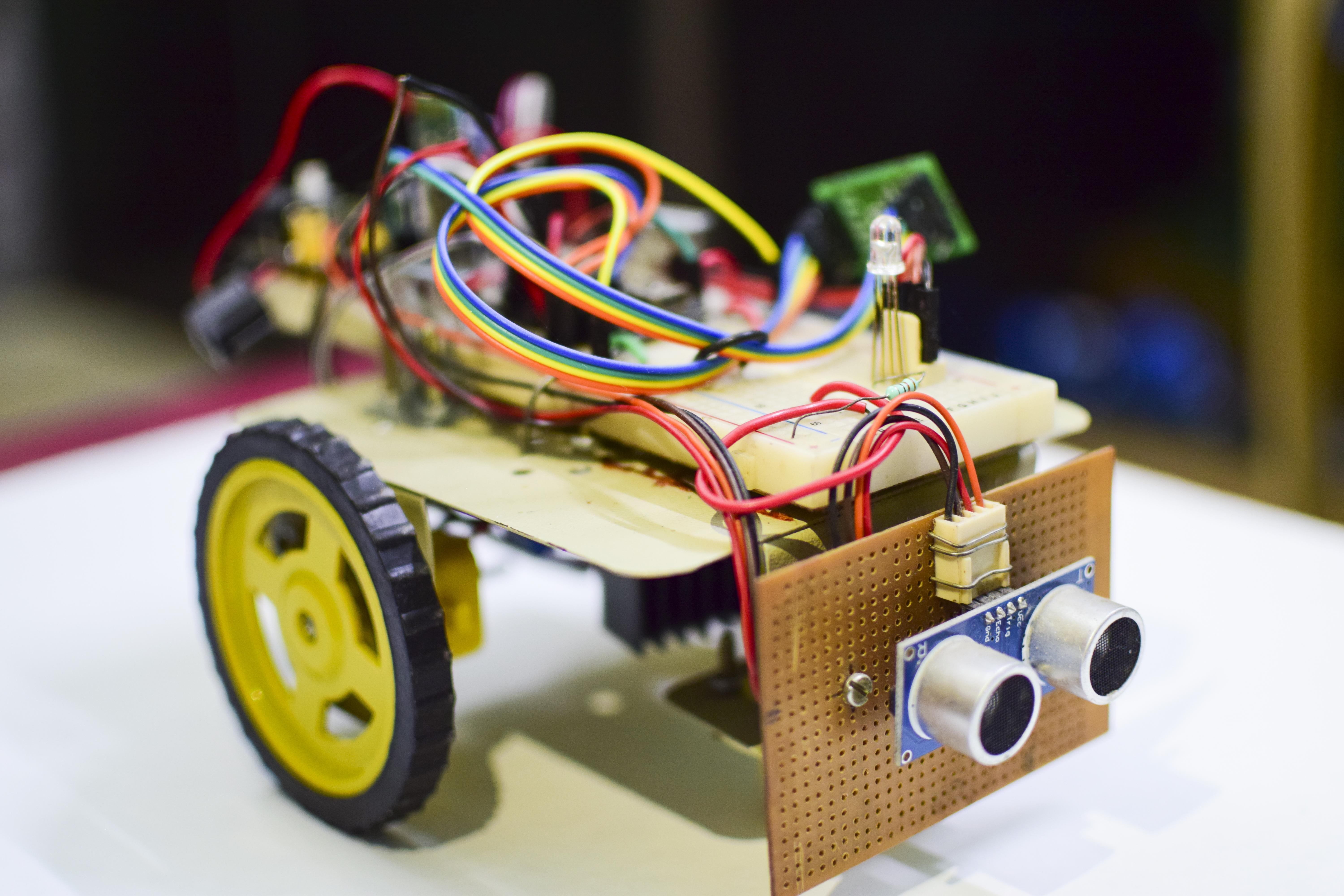
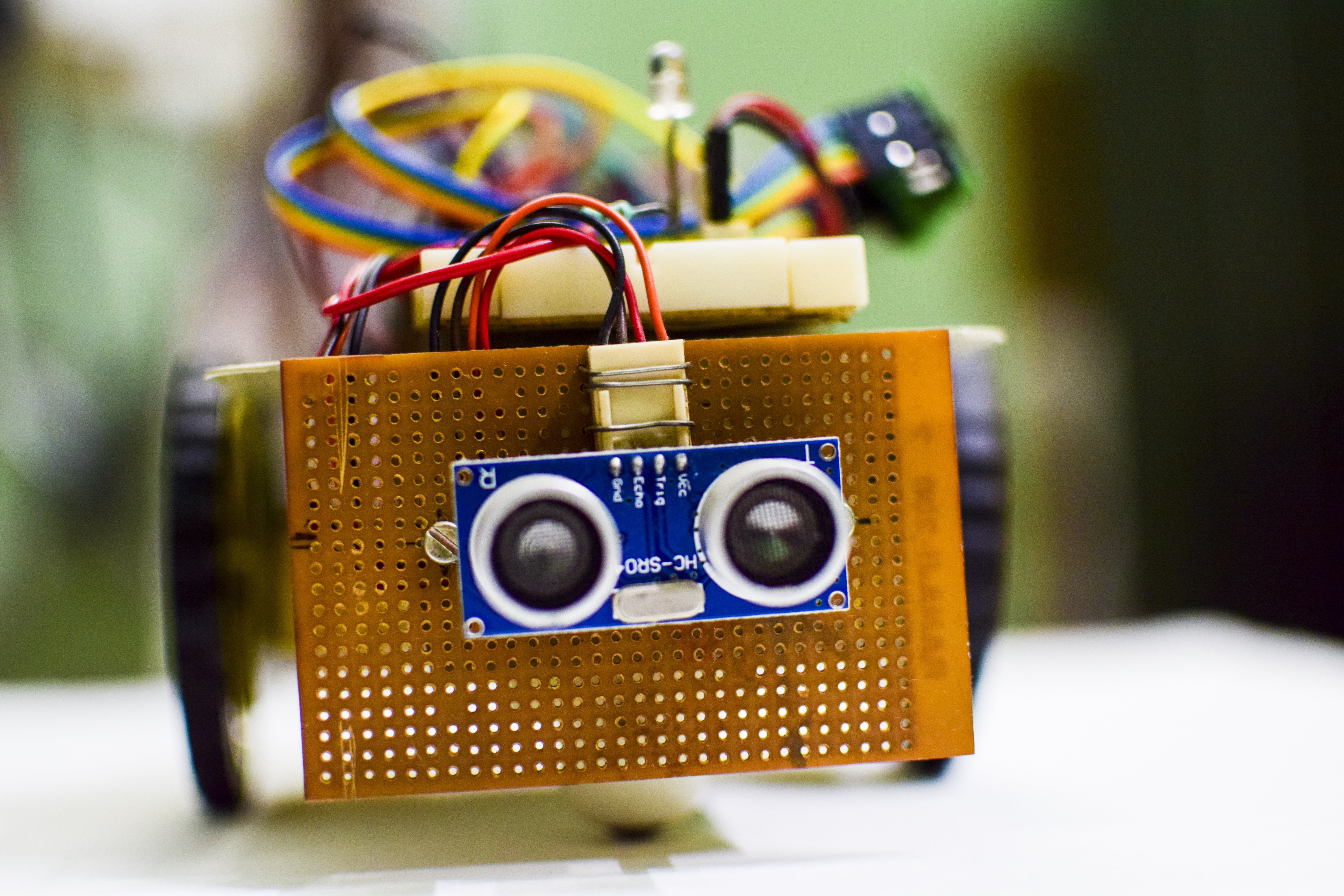
หุ่นยนต์ใช้โมดูล ultrasonic sensor HC-SR04 เพื่อตรวจจับสิ่งกีดขวางในเส้นทาง เมื่อตรวจจับสิ่งกีดขวางใดๆ ระหว่างการเคลื่อนที่ไปข้างหน้า หุ่นยนต์จะหยุด และมีการใช้ RGB LED เพื่อแสดงสถานะของหุ่นยนต์
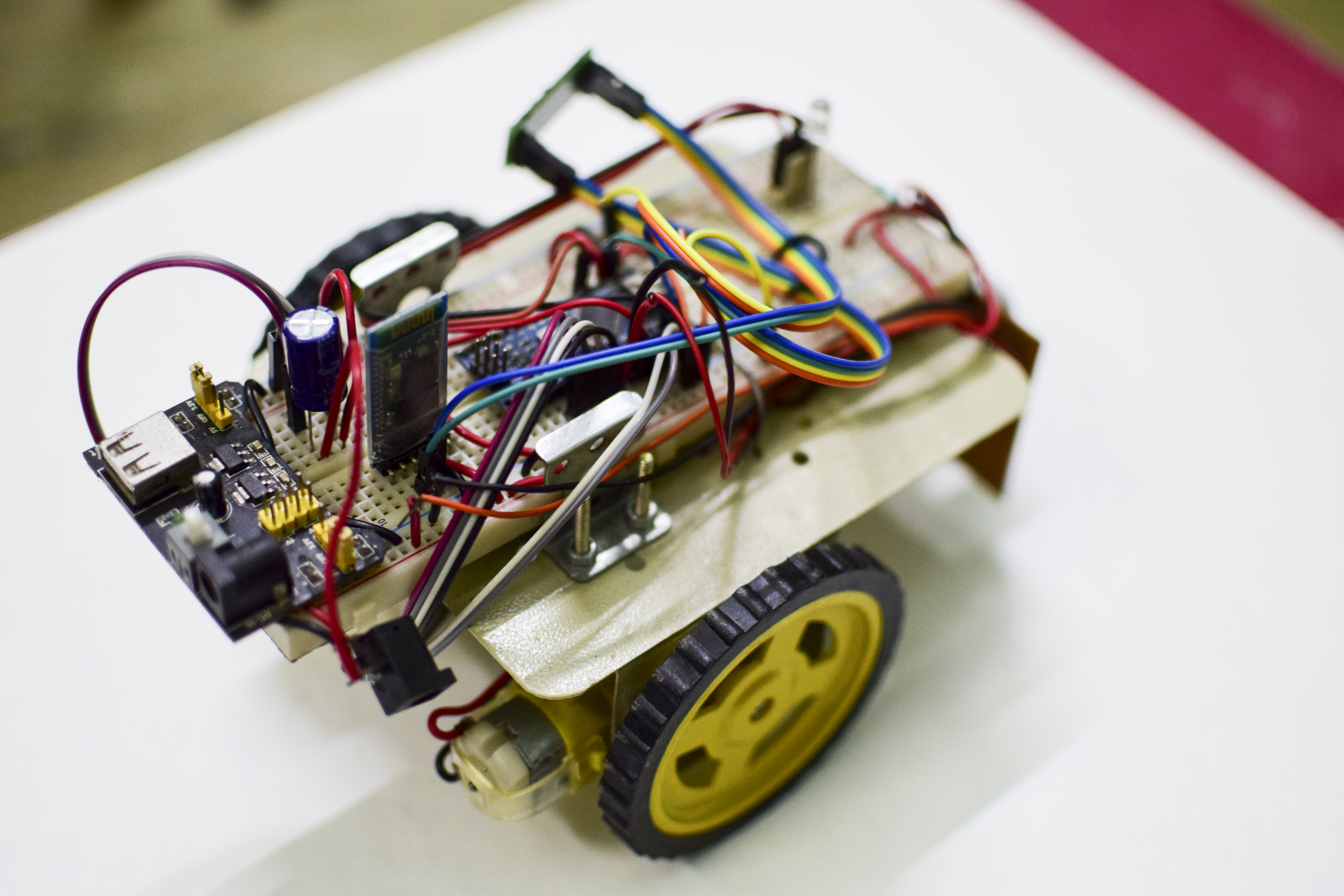
หุ่นยนต์ถูกประกอบบนฐานล้อ 2 ล้อ ซึ่งประกอบด้วยมอเตอร์ขับเคลื่อนแบบมีเกียร์สองตัว วงจรถูกประกอบบน breadboard พร้อมแหล่งจ่ายไฟ (3.3v และ 5v) Arduino Nano ไม่สามารถขับเคลื่อนมอเตอร์ได้โดยตรง เนื่องจากมอเตอร์ต้องการกระแสที่สูงกว่ามาก ดังนั้นจึงใช้โมดูล L298N motor driver เพื่อขับเคลื่อนมอเตอร์ โดยใช้สัญญาณ PWM จาก Arduino Nano เพื่อควบคุมความเร็วของมอเตอร์ผ่านขา ENA และ ENB ของโมดูล L298N motor driver
นี่คือวิดีโอสั้นๆ ของหุ่นยนต์ขณะทำงาน:
หวังว่าคุณจะชอบหุ่นยนต์หลีกเลี่ยงสิ่งกีดขวางที่ควบคุมด้วย Bluetooth ของผม หุ่นยนต์ตัวนี้สามารถปรับเปลี่ยนและขยายเพื่อใช้ในระบบ home automation ยานพาหนะหลีกเลี่ยงสิ่งกีดขวางสำหรับโรงงานอุตสาหกรรม ฯลฯ และการใช้งานอื่นๆ อีกมากมาย
🛠️ Deep Dive / Technical Analysis
Smart Obstacle / Bluetooth 4WD Car คือวิวัฒนาการขั้นสุดท้ายของชุดหุ่นยนต์พื้นฐาน มันเป็นโปรเจกต์แบบ "Hybrid": ไม่ได้เป็นแบบ autonomous ทั้งหมด และไม่ได้เป็นแบบ manual ทั้งหมด มันแสดงถึงเทคโนโลยี Drive-by-Wire สมัยใหม่—คุณขับเคลื่อนโดยใช้แอป แต่รถจะทำการ override การตัดสินใจที่ไม่ถูกต้องของคุณเพื่อให้มั่นใจในความปลอดภัย
การรวม Comm Logic เข้ากับ Sensor Math
โครงสร้างของ loop() จะต้องมีการกำหนดเวลาที่แม่นยำ
- The Radar Check: ขั้นแรก, HC-SR04 ping sensor ที่ติดตั้งอยู่บนกันชนหน้าจะทำการตรวจสอบระยะทาง
- The Override Check: หากระยะทาง
< 20cm, Arduino จะส่ง interrupt มันจะบังคับให้speed = 0สำหรับมอเตอร์ทั้งสี่ตัว, ส่งเสียง buzzer เตือน และ เพิกเฉยอย่างสิ้นเชิง ต่อคำสั่ง "ไปข้างหน้า" ใดๆ ที่มาจากโทรศัพท์ของคุณ! - The Listening Phase: หากไม่มีสิ่งกีดขวาง (
> 20cm), มันจะตรวจสอบSerial.read()สำหรับแพ็กเก็ต Bluetooth ที่เข้ามา - The Execution: หากโทรศัพท์ส่งคำสั่ง "Forward", L298N จะจ่ายกระแสไฟไปยังมอเตอร์ทั้งสี่ตัวพร้อมกัน
Pan/Tilt Scanning (Optional Upgrade)
เพื่อให้รถมีความฉลาดอย่างแท้จริง, ultrasonic sensor มักจะถูกติดตั้งบน Micro Servo (SG90) เมื่อรถหยุดเองก่อนชนกำแพง, มันจะ:
- หมุน servo ไปทางซ้ายและส่ง ping (ระยะ 60cm ไม่มีสิ่งกีดขวาง)
- หมุน servo ไปทางขวาและส่ง ping (ระยะ 10cm มีสิ่งกีดขวาง)
- Arduino จะตัดสินใจว่าเส้นทางที่ปลอดภัยที่สุดคือทางซ้าย, หมุนล้อ, และดำเนินการภารกิจ autonomous ต่อไป!
Central Hardware List
- Arduino Uno/Mega: หน่วยประมวลผลแบบ hybrid
- L298N Motor Driver Module: จำเป็นสำหรับการดึงกระแสไฟจำนวนมาก
- 4WD Chassis Kit (4 Motors, 4 Wheels)
- HC-SR04 Ultrasonic Sensor
- HC-05 Bluetooth Module
- Dual 18650 Battery Pack: ต้องมีอย่างน้อย 7.4 Volts เพื่อเอาชนะ stall current ของมอเตอร์ทั้งสี่ที่ทำงานอยู่