ความเป็นไปได้ของการใช้ Arduino เพียงตัวเดียว!

ข้อกำหนดสำหรับระบบซ่อมแซมแผง Honeycomb แบบอัตโนมัติ (Automated Honeycomb Repair System) ได้รับการกำหนดโดยแผนก Defense, Space and Security ของ Boeing ซึ่งแผง Honeycomb ถูกนำมาใช้อย่างแพร่หลายในโครงสร้างดาวเทียมสำหรับการใช้งานด้านอวกาศ รัฐบาล และการสื่อสารทางทหาร นี่คือโครงการระดับ senior project ร่วมกันระหว่างนักศึกษาจาก Cal State Los Angeles และ The Boeing Company.
ข้อกำหนดคือการออกแบบระบบซ่อมแซมอัตโนมัติที่จะซ่อมแซมรอยบุบและความเสียหายบนแผง Honeycomb ด้วยวิธีการอัตโนมัติ เพื่อเร่งกระบวนการ "การซ่อมแซมด้วยมือ" แบบเดิม ซึ่งปัจจุบันใช้เวลาประมาณ 3-4 ชั่วโมง ในการซ่อมแซมรอยบุบเพียงจุดเดียว.
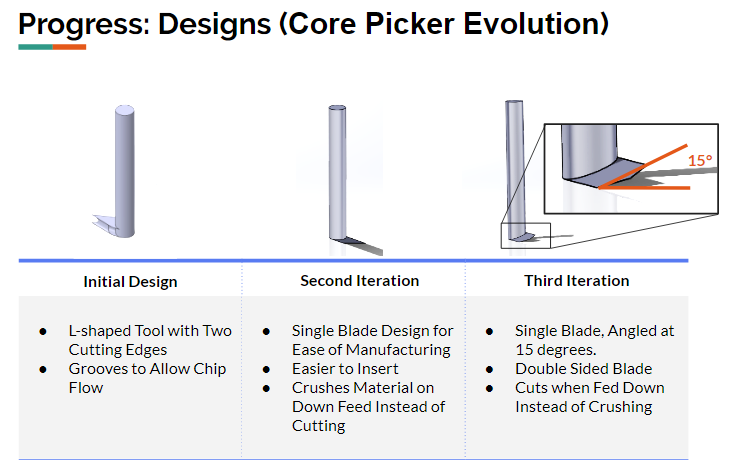
แนวคิดพื้นฐานของกระบวนการนี้คือการเจาะแผ่นหน้าด้านบนของ Honeycomb ด้วยสว่านขนาด 1/4 นิ้ว, จากนั้นเจาะ Core Pick ที่มีเส้นผ่านศูนย์กลางภายใน 1 นิ้วใต้แผ่นหน้าด้านบนที่เจาะไว้ลงไปถึงแผ่นหน้าด้านล่าง, ดูดเศษวัสดุออก และสุดท้ายเติมโฟมลงในช่องว่าง/พื้นที่ที่ได้รับผลกระทบซึ่งถูก Core Pick ออกไป
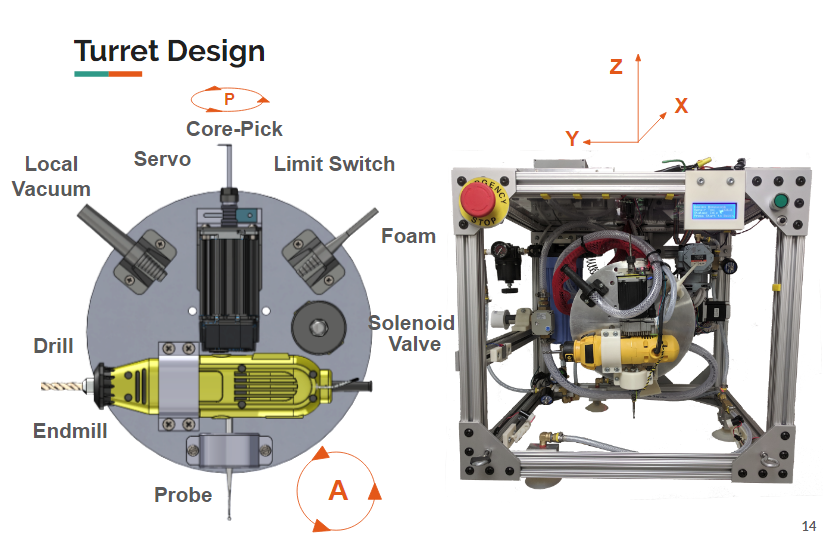
เพื่อให้บรรลุกระบวนการดังกล่าว ระบบย่อยเชิงกลประกอบด้วยแกน Y และ Z ที่ขับเคลื่อนด้วย Ball-screw และแกน A แบบหมุนสำหรับการเปลี่ยนเครื่องมือแบบ Turret ซึ่งยังทำให้สามารถใส่เครื่องมือ Core-picker แบบกำหนดเองในมุมที่ต้องการได้ ซึ่งเครื่องมือนี้ก็ได้รับการออกแบบพิเศษโดยทีมงานของเราสำหรับงาน Core-picking จริง

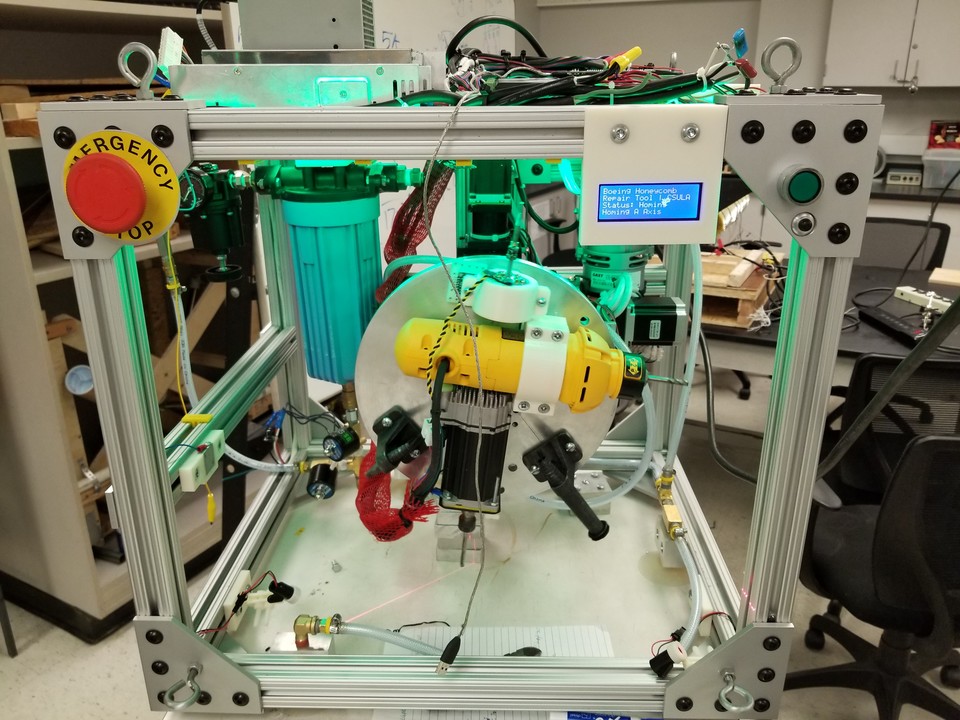
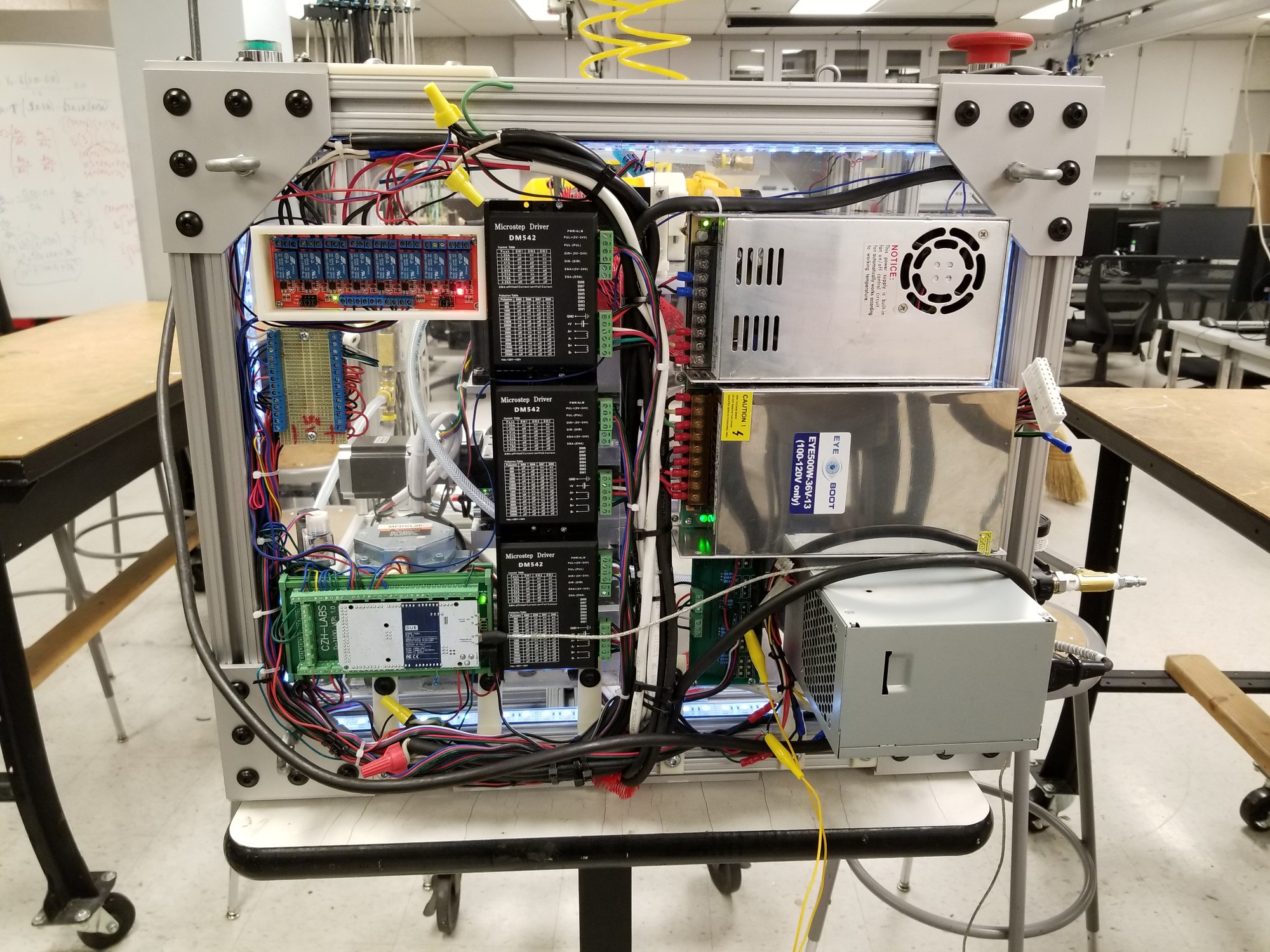
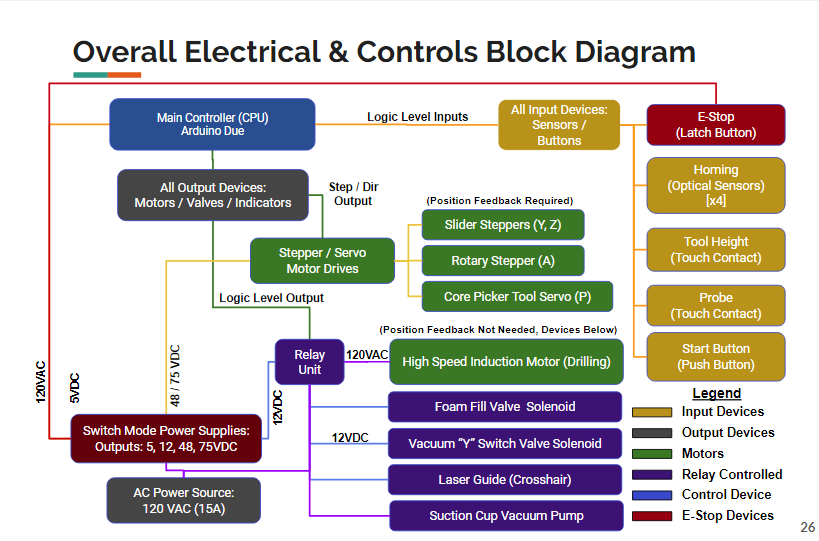
ระบบย่อยทางไฟฟ้าประกอบด้วย Arduino Due เพียงตัวเดียวสำหรับการควบคุมและขับเคลื่อนระบบอัตโนมัติของเครื่องจักรทั้งหมด ได้แก่ Stepper motor และ Drive 3 ตัว, Servo motor + Drive 1 ตัว, Solenoid valve 6 ตัว, จอแสดงผล LCD ขนาด 20x4 สำหรับแสดงสถานะตลอดกระบวนการ, แถบไฟ RGBW LED แบบเต็มสีสำหรับแสดงผลสถานะด้วยภาพ, และ Relay 8 ตัว อุปกรณ์อินพุตประกอบด้วย: Optical homing sensor 4 ตัว (สำหรับแต่ละแกน), อินพุต Tool touch plate, อินพุต Probe และสุดท้ายคืออินพุต Start + Stop.
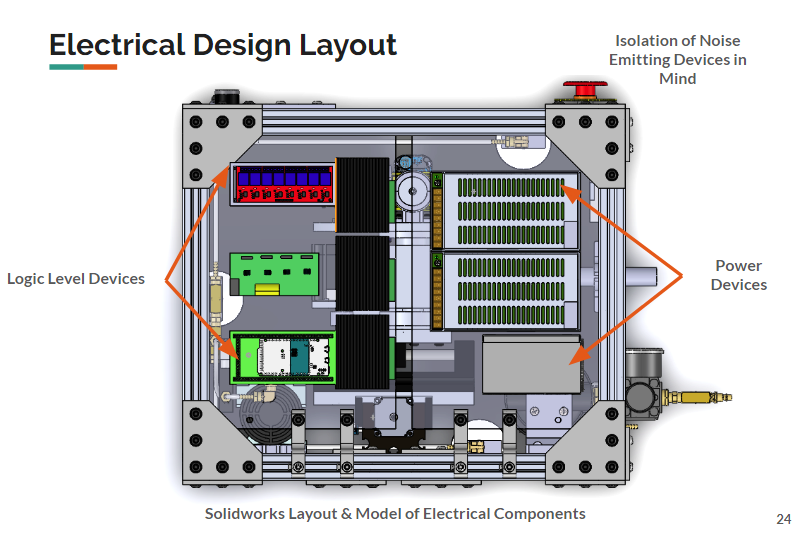
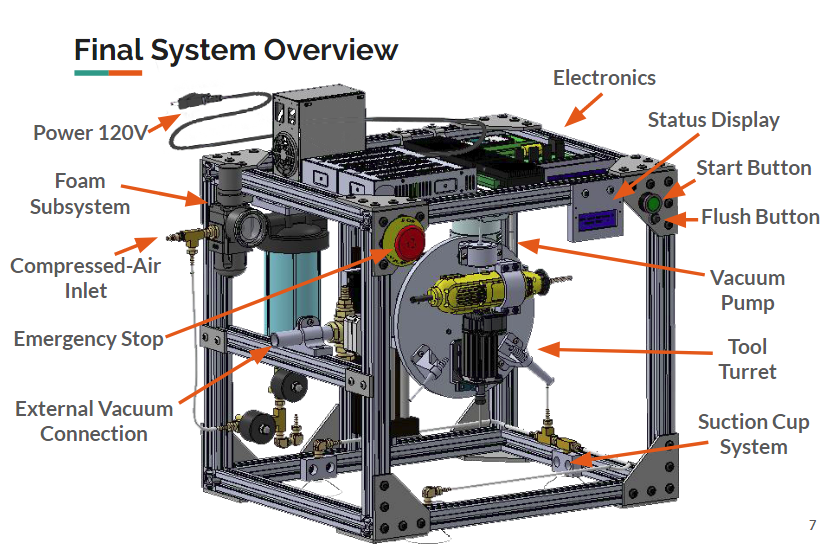
อุปกรณ์ที่อาจก่อให้เกิดสัญญาณรบกวนทางไฟฟ้าทั้งหมด เช่น Power supply และ Motor drive ถูกวางไว้ห่างจากอุปกรณ์ Logic level อย่าง Microprocessor ควบคุม / Arduino โดยการออกแบบนี้คำนึงถึงเรื่องดังกล่าวตั้งแต่แรก ซึ่งสามารถดูได้จาก Solidworks model layout
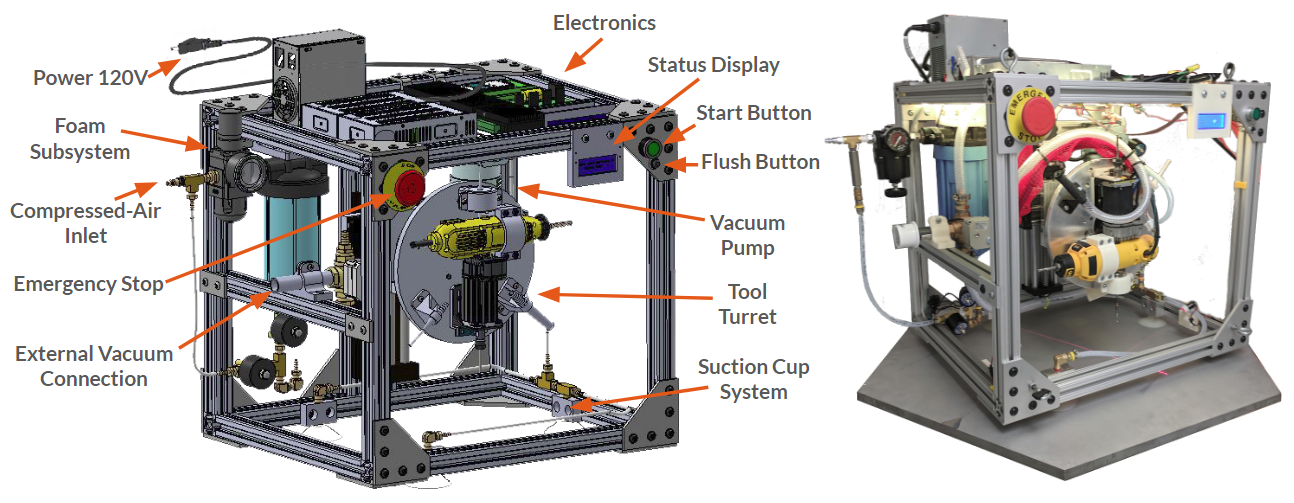
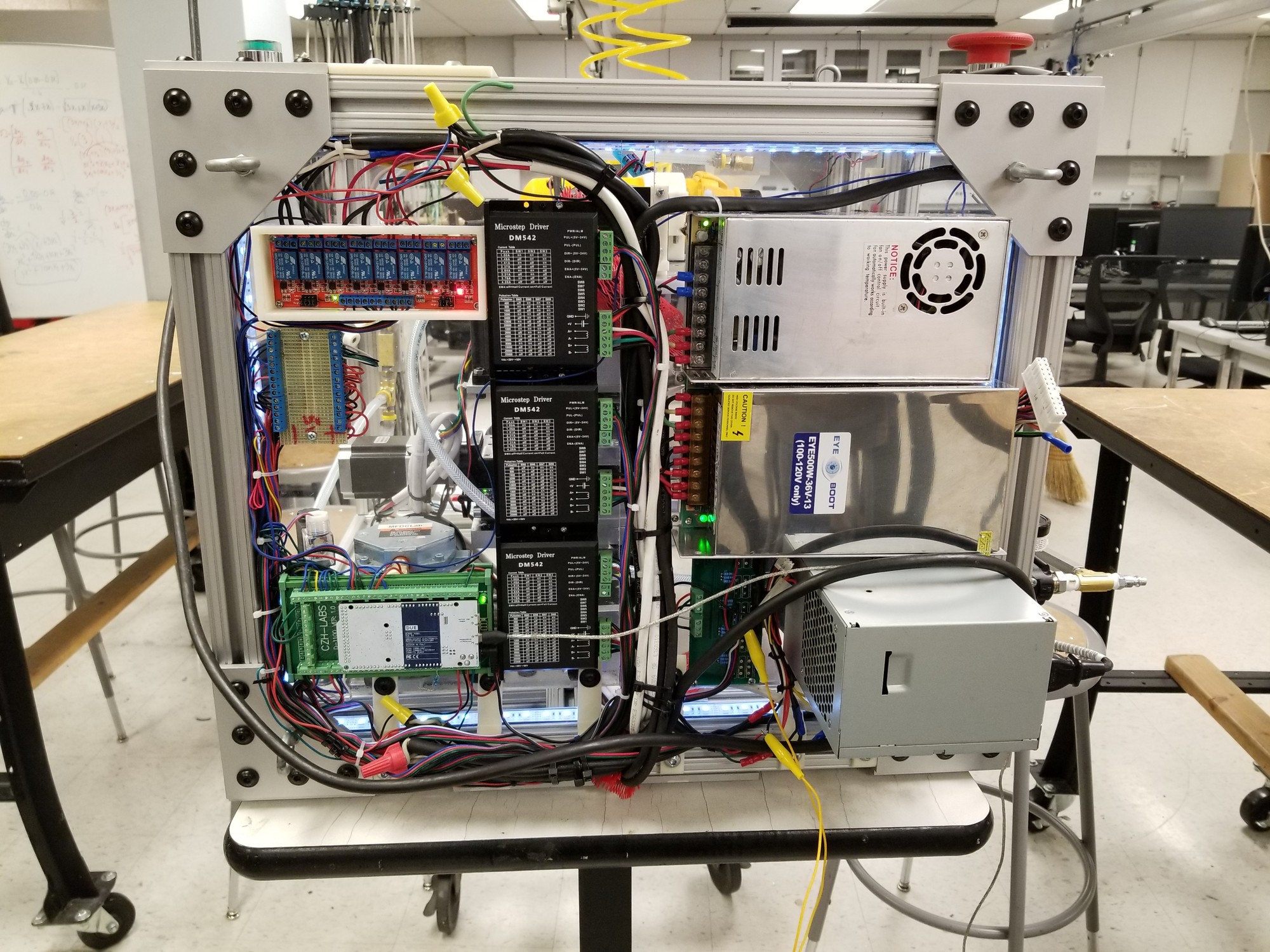
จาก Solidworks model ทางซ้ายสู่การสร้างจริงทางขวา ภาพด้านบนแสดงเครื่องจักรจริงหลังจากการประดิษฐ์ กระบวนการอัตโนมัติของเครื่องจักรทั้งหมดนี้ช่วยลดเวลาการซ่อมแซมด้วยมือจาก 4-6 ชั่วโมง เหลือเพียงประมาณ 10 นาที
ด้านล่างเป็นวิดีโอ Time-lapse ของกระบวนการทั้งหมดของเครื่องซ่อมแซมอัตโนมัติ
วิดีโอเริ่มต้นด้วยการ "ตรวจสอบเครื่องมือ" หรือวัดค่าเครื่องมือที่ผู้ใช้สามารถเปลี่ยนได้ทั้งหมด เพื่อตรวจจับการเปลี่ยนแปลงใดๆ ที่เกิดจากการสึกหรอหรือการเปลี่ยน เนื่องจากเครื่องมือเหล่านี้จะไม่ถูกวางในตำแหน่งที่แม่นยำด้วยมือของมนุษย์ ซึ่งรวมถึงดอกสว่าน, Probe และเครื่องมือ Core-picking แบบกำหนดเอง ถัดไปพื้นผิวของแผง Honeycomb จะถูกวัดด้วย Probe และทำการเจาะ Face sheet หลังจากเจาะแล้ว Face sheet ด้านล่างจะถูกวัดเพื่อให้แน่ใจว่ากระบวนการ Core picking ถัดไปจะไม่ทะลุ Face sheet ด้านล่างเมื่อเคลียร์ Core Honeycomb ด้านใน โดยใช้ระยะทางที่วัดได้จาก Face sheet ด้านบนถึงด้านล่าง กระบวนการ Core picking จะถูกดำเนินการ โปรดสังเกตการเคลื่อนไหวของมอเตอร์ที่ละเอียดอ่อนที่จำเป็นสำหรับเครื่องมือแบบกำหนดเองที่ทำมุมเพื่อเข้าและออกจากรูที่เจาะไว้ก่อนหน้านี้ ถัดไประบบสุญญากาศจะดูดเศษวัสดุทั้งหมดในช่องว่างที่ถูก Core Pick ออกไป และสุดท้ายโฟมจะถูกเติมลงในพื้นที่ที่ได้รับผลกระทบ เป็นการเสร็จสิ้นกระบวนการซ่อมแซม เครื่องจักรจะรอรอยบุบอีกครั้งและการกดปุ่ม Start เพื่อเริ่มกระบวนการใหม่
สมาชิกทีม Senior Project: Allen Analian (EE), Jeffrey T. Iwasaki (ME), Jonathan Sanabria (ME), Gino Kiettisak (ME), Carlos A. Sanchez (ME), Alberto M. Cortes (EE)
คำขอบคุณ: ขอขอบคุณเป็นพิเศษสำหรับบริษัท Boeing และ Cal State Los Angeles สำหรับโอกาสนี้, Theodore (Ted) Nye (Senior Design Director), Teofilo El-Masri, Cameron Massey, Jose Armenta, Jonathan Fish (ผู้ประสานงานของ Boeing).
EXPANDED TECHNICAL DETAILS
การบำรุงรักษาวัสดุคอมโพสิตอากาศยาน
โครงการระบบอัตโนมัติทางอุตสาหกรรมที่ซับซ้อนนี้มุ่งเน้นไปที่การใช้เรซินและความร้อนอย่างแม่นยำสำหรับการซ่อมแซมโครงสร้าง Honeycomb ที่ใช้ในเครื่องบินเช่น Boeing 787
- การควบคุมสุญญากาศด้วย Multi-Sensor: Arduino จัดการปั๊มสุญญากาศและ Pressure sensor ที่มีความแม่นยำสูง มันช่วยให้มั่นใจได้ว่ามีการรักษาระดับแรงดันลบที่คงที่และเฉพาะเจาะจงภายในแผ่นแปะซ่อมแซม เพื่อกำจัดฟองอากาศ (voids) ในวัสดุคอมโพสิต
- ผ้าห่มความร้อนควบคุมด้วย PID: ใช้ PID loop เพื่อควบคุมอุณหภูมิของผ้าห่มความร้อน Silicone ระบบจะรับ Feedback จาก K-type thermocouple เพื่อให้มั่นใจว่าเรซินจะทำการ Cure ที่อุณหภูมิที่แม่นยำโดยไม่ทำให้อากาศยานบริเวณโดยรอบร้อนเกินไป
การปฏิบัติตามข้อกำหนดด้านข้อมูล
- การบันทึกข้อมูลแบบ Real-Time: Arduino สตรีมข้อมูล Pressure และ Temperature พร้อม Timestamp ไปยัง PC ซึ่งสร้าง "Digital Birth Certificate" สำหรับการซ่อมแซม ซึ่งจำเป็นสำหรับการปฏิบัติตามข้อกำหนดด้านความปลอดภัยทางการบินของ FAA/EASA