ชื่อโปรเจกต์: หุ่นยนต์กระดาษ Burn-E
ความเป็นมา
ผมเป็นนักพัฒนาซอฟต์แวร์ ผมอ่านเรื่องเกี่ยวกับสาขาหุ่นยนต์มามาก ก่อนที่ผมจะตัดสินใจก้าวเข้าสู่โลกที่น่าสนใจนี้
คำถามหนึ่งผุดขึ้นในใจ: ทำไมไม่ลองสร้างหุ่นยนต์ให้ทำสิ่งเจ๋งๆ ดูบ้าง? จากนั้นผมก็ได้เริ่มเรียนรู้วิธีการเขียนโปรแกรมวงจรไฟฟ้า และผนวกเข้ากับความสามารถในการสร้างโมเดลกระดาษ
หุ่นยนต์เคลื่อนที่ตัวนี้ทำหน้าที่คำนวณวัตถุรอบข้าง และจะส่งสัญญาณเตือนเมื่อเกินขีดจำกัดที่กำหนดไว้ และสามารถควบคุมได้ด้วยคอมพิวเตอร์
ขั้นตอนที่ 1: (แนวคิด)
ผมใช้โมเดลกระดาษจาก Paper-replika ดาวน์โหลดโมเดลกระดาษได้ที่นี่: http://paper-replika.com/index.php?option=com_content&task=view&id=466&Itemid=30
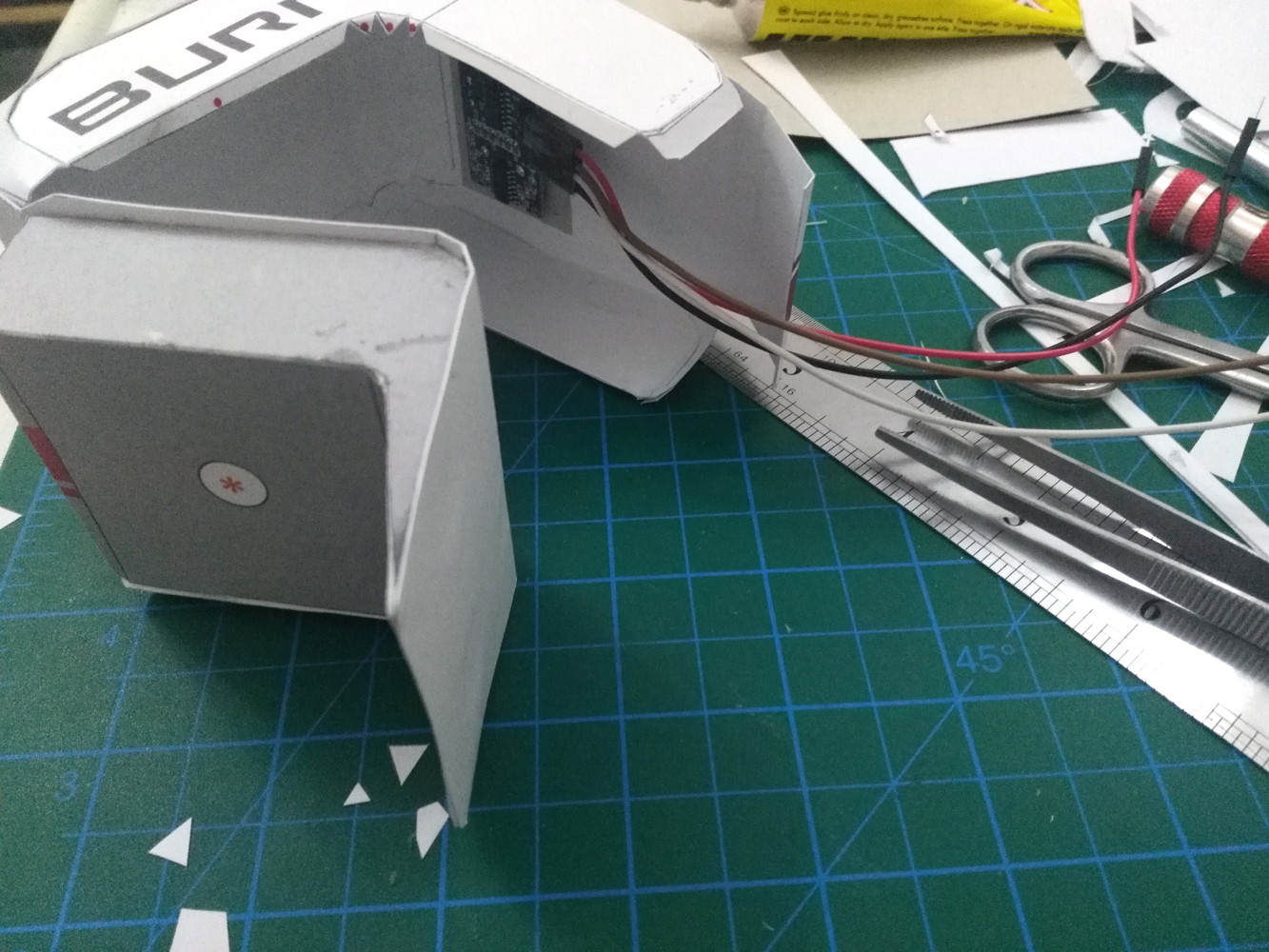
และเมื่อผมนำชิ้นส่วนอิเล็กทรอนิกส์ไปใส่ในโมเดล ก็ทำให้หุ่นจำลองมีชีวิตขึ้นมา
*ผมพับหัวโมเดล แล้วใส่ ultrasonic sensor เข้าไปแทนตาของหุ่นยนต์
ขั้นตอนที่ 2: ทดสอบ Sensors
ทดสอบ sensors หลังจากติดตั้งไว้ในหัว
ผมใช้ Arduino Uno และ ultrasonic sensor เพื่อให้หุ่นยนต์วัดระยะทาง
ตัวอย่างเช่น ถ้าวัตถุอยู่ห่างจาก sensor 10 cm และความเร็วของเสียงคือ 340 m/s หรือ 0.034 cm/µs คลื่นเสียงจะต้องเดินทางประมาณ 294 u seconds แต่ค่าที่คุณจะได้รับจาก Echo pin จะเป็นสองเท่าของค่านั้น เพราะคลื่นเสียงต้องเดินทางไปข้างหน้าและสะท้อนกลับมา ดังนั้น เพื่อให้ได้ระยะทางเป็น cm เราจำเป็นต้องคูณค่าเวลาเดินทางที่ได้รับจาก Echo pin ด้วย 0.034 แล้วหารด้วย 2
นี่คือบทช่วยสอนฉบับเต็มเกี่ยวกับวิธีการใช้ ultrasonic sensors: https://www.arduino.cc/en/Tutorial/Ping

ขั้นตอนที่ 3: กลไกตัวหุ่น
เพื่อให้หุ่นยนต์ดูสมจริงยิ่งขึ้น ผมได้ติดตั้ง servo motor สามตัวไว้ภายในตัวหุ่นเพื่อควบคุมการเคลื่อนไหวของหัวและแขน
ลองดู servo motor ตัวนี้และสิ่งที่มันทำได้: https://www.arduino.cc/en/Reference/Servo
ขั้นตอนที่ 4: แขนหุ่นยนต์
หุ่นยนต์ยังขาดแขนสองข้าง ดังนั้นผมจึงติดตั้งโครงสร้างโมเดลกระดาษของแขนตามที่แสดง จากนั้นผมก็วาง servo gear เข้าไปข้างใน ซึ่งวิธีนี้ทำให้คุณสามารถควบคุมพวกมันได้อย่างง่ายดาย
วิดีโอสาธิต
รายละเอียดทางเทคนิคเพิ่มเติม
วิศวกรรมกระดาษแบบ Kinetic
โปรเจกต์นี้ทำให้หุ่นยนต์ซ่อมบำรุงที่น่ารักอย่าง "Burn-E" มีชีวิตขึ้นมา โดยใช้การผสมผสานที่เป็นเอกลักษณ์ของการประดิษฐ์จากกระดาษและระบบหุ่นยนต์ที่ขับเคลื่อนด้วย Arduino
- Lightweight Servo Linkage: Arduino ทำหน้าที่จัดการ SG90 micro servos ขนาดเล็กที่ซ่อนอยู่ภายในโครงสร้างกระดาษ เฟิร์มแวร์จะประสานการเคลื่อนไหวของ "แขนเชื่อม" และ "หัว" เพื่อเลียนแบบอนิเมชันที่แสดงถึงความประหม่าอันเป็นเอกลักษณ์ของตัวละคร
- Acoustic Interaction Hub: ประกอบด้วย piezo buzzer ขนาดเล็ก; Arduino จะเล่นลำดับเสียง 8-bit ที่จำลองภาษา "Binary-Beep" ของหุ่นยนต์ในภาพยนตร์ในระหว่างสถานะการซ่อมแซม/ความล้มเหลวที่แตกต่างกัน
โหมดโต้ตอบ
- Motion-Triggered Repair: ใช้ vibration หรือ tilt sensor ขนาดเล็ก; เมื่อหุ่นยนต์ถูกกระแทก Arduino จะเริ่มอนิเมชัน "Panic Dance" ซึ่งช่วยเพิ่มบุคลิกภาพและการโต้ตอบของของเล่น