เครื่องวาดภาพ CNC สุดเจ๋งจาก TechnoFabrique
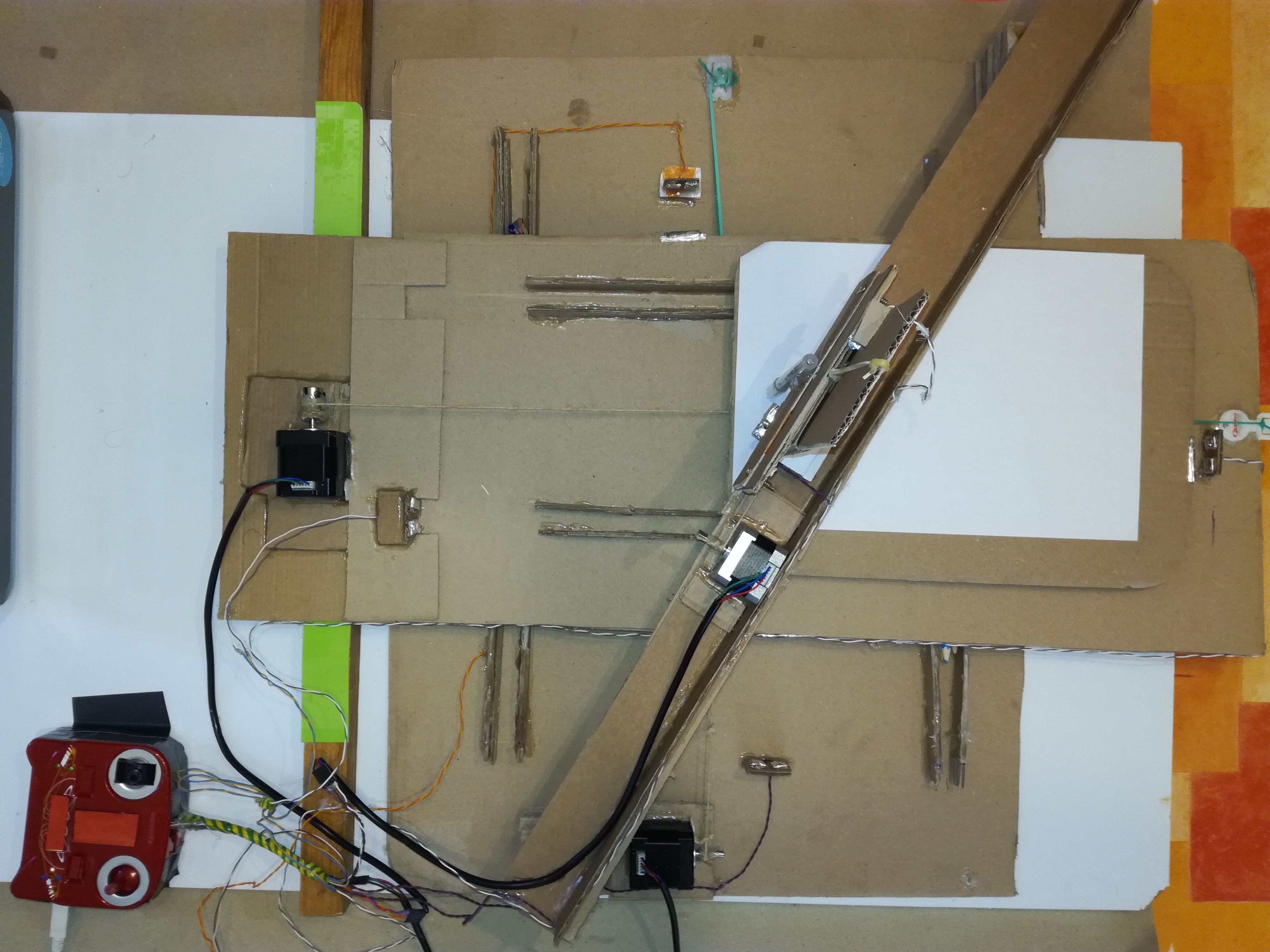
หลังจากซื้อมอเตอร์สเต็ป Nema 17 มาแล้ว พวกเราก็ตัดสินใจสร้างเครื่องวาดภาพขึ้นมาเองเลยจ้า เป้าหมายคือทำเครื่องวาดที่ใช้อุปกรณ์น้อยที่สุด ควบคุมแกนนึงก็ใช้แค่ Nema 17 ตัวเดียวดึงสายให้เคลื่อนที่เข้า แล้วใช้ยางยืดดึงกลับออกมา ง่ายๆ ไม่ต้องเยอะ!

ภาพรวมโปรเจกต์
"CNC-Logic" โปรเจกต์นี้คือการลงมือทำจริงแบบจัดเต็มเรื่อง Open-Loop Mechatronic Orchestration และ Asynchronous Motion Forensics แทนที่จะใช้คอมสตรีม G-code ตามปกติ เราใช้จอยสติ๊กสองอันมาควบคุมการเคลื่อนที่แบบ Analog-to-Digital โดยตรงเลยจ้า ระบบนี้ขับเคลื่อนด้วยมอเตอร์ NEMA 17 แบบ 3 แกน โดยแกนแนวนอน $(X, Y)$ และแกนดันปากกา $(\text{Pen-Z})$ ถูกควบคุมผ่านการตรวจวัดแรงดันไฟฟ้าแบบกำหนดค่าได้ (deterministic voltage-threshold forensics) โครงสร้างออกแบบมาให้แน่นหนา ใช้ลิมิตสวิตช์ทำเองเพื่อเป็นระบบตรวจสอบความปลอดภัย (fail-safe operational diagnostics) เวลาทำงาน
เราไม่อยากควบคุมด้วยคอม แต่เลือกใช้จอยสติ๊กแทน เพื่อให้ระบบทำงานได้ด้วยแหล่งจ่ายไฟเพียงอย่างเดียว จอยสติ๊กขวาใช้ควบคุมการเคลื่อนที่บนแกน X และ Y หมายความว่าเราวาดรูปด้วยเจ้านี่ได้เลย ส่วนจอยสติ๊กซ้ายใช้ควบคุมตำแหน่งการยก-วางปากกา ง่ายชิบหาย!
ลงลึกเรื่องเทคนิค
- Stepper-Driver & Current-Chopping Forensics:
- The A4988 Logic-Engine Diagnostics: มอเตอร์ NEMA 17 แต่ละตัวถูกขับด้วยไอซี A4988 การทำงาน (Forensics) เกี่ยวข้องกับการตั้งค่าพิน "Step" และ "Direction" เพื่อแปลงพัลส์ลอจิกจาก Arduino ให้เป็นขั้นแม่เหล็กแบบไม่ต่อเนื่อง (discrete magnetic steps) เน้นไปที่ Current-Limit Heuristics ปรับค่าเพื่อป้องกันไม่ให้มอเตอร์ร้อนเกิน (thermal-runaway) ในขณะที่ยังคงแรงบิดสูง (high holding-torque) สำหรับการดันปากกา
- Bipolar Microstepping Harmonics: ระบบสร้างการเคลื่อนที่ความละเอียดสูงโดยการส่งพัลส์ไปยังตัวแปลสัญญาณภายในของ A4988 การปรับโหมด Half-step หรือ Micro-step ทำให้เส้นทางการวาดนุ่มลื่น สั่นน้อยลง ช่วยลดการสั่นพ้องเชิงกล (mechanical resonance) ที่มักเกิดกับสเต็ปเปอร์มอเตอร์กระแสสูง
- Joystick-to-Cartesian Mapping Heuristics:
- The Analog-to-Pulse Orchestration: จอยสติ๊กให้สัญญาณแรงดันต่อเนื่อง $(0-5\text{V})$ การทำงาน (Forensics) เกี่ยวข้องกับการแมปค่าที่เบี่ยงเบนจากจุดศูนย์กลาง $(\approx 2.5\text{V})$ ไปเป็นค่า
stepDelayแบบไดนามิก ยิ่งผู้ใช้กดจอยสติ๊กไปไกลเท่าไหร่ ความถี่พัลส์ $(\omega)$ ก็ยิ่งสูงขึ้น ส่งผลให้ความเร็วในการเคลื่อนที่เพิ่มขึ้น - Axis-Arbitration Harmonics: จอยสติ๊กซ้ายควบคุมเฉพาะแกน Z $(\text{Pen-Lift})$ ส่วนจอยสติ๊กขวาจัดการระนาบ XY การแบ่งหน้าที่นี้ทำให้เราวาดรูปได้ด้วยความแม่นยำระดับมิลลิวินาที โดยไม่ต้องพึ่งพายูทิลิตี้ CAM ซับซ้อนเลย สู้งานนะน้อง!
- The Analog-to-Pulse Orchestration: จอยสติ๊กให้สัญญาณแรงดันต่อเนื่อง $(0-5\text{V})$ การทำงาน (Forensics) เกี่ยวข้องกับการแมปค่าที่เบี่ยงเบนจากจุดศูนย์กลาง $(\approx 2.5\text{V})$ ไปเป็นค่า
วิศวกรรมและการนำไปใช้
- การวินิจฉัยลิมิตสวิตช์และระบบป้องกันความล้มเหลว (Fail-Safe):
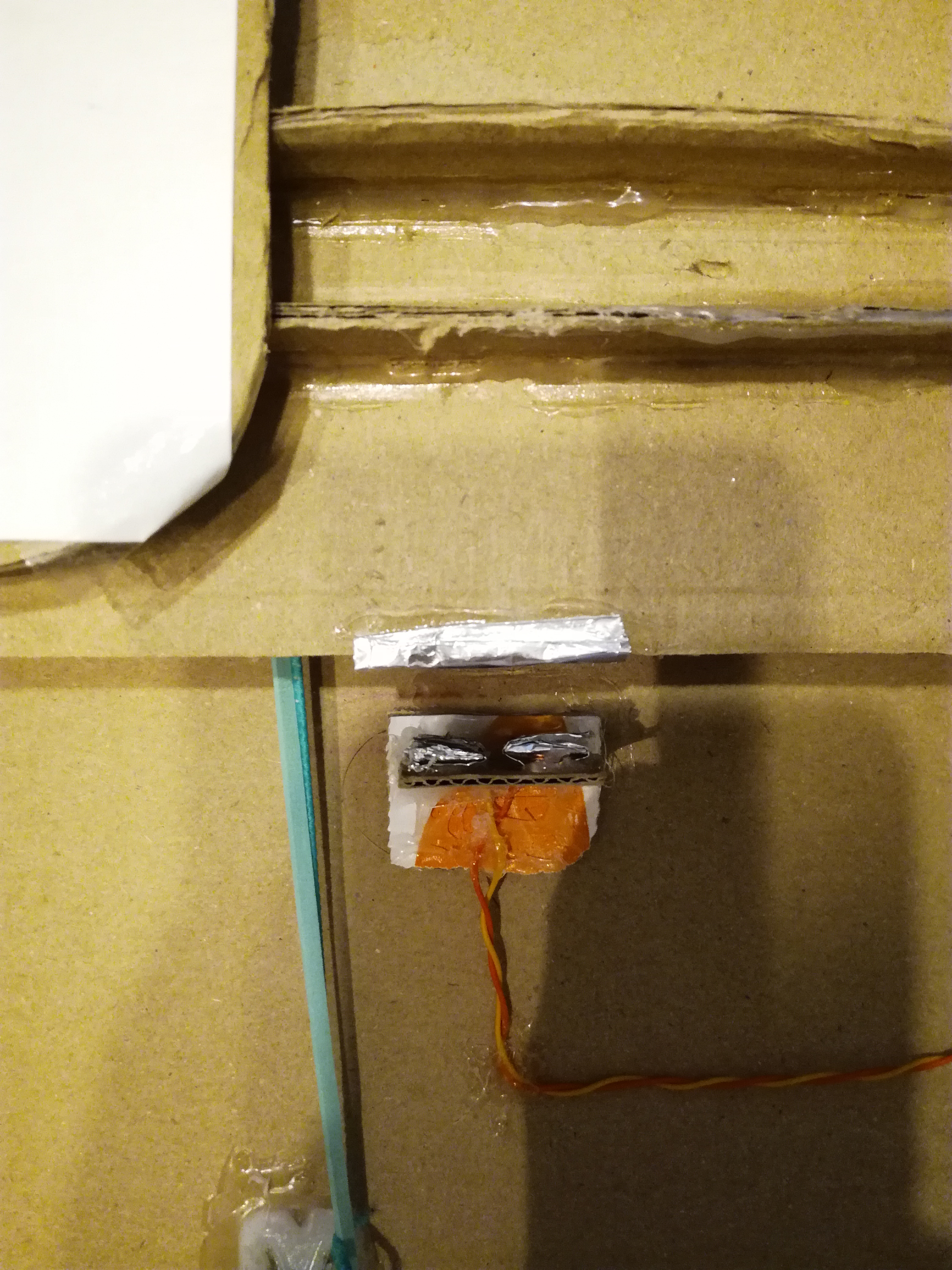
- นิติวิทยาศาสตร์การสัมผัสแบบทำเอง (DIY Contact-Forensics): เพื่อป้องกันไม่ให้ระบบเมคคาทรอนิกส์หยุดค้าง (stall-out) โครงการนี้ใช้การออกแบบลิมิตสวิตช์แบบ "อลูมิเนียมบนกระดาษแข็ง" ที่ทำเอง กระบวนการ "นิติวิทยาศาสตร์" เกี่ยวข้องกับการตรวจสอบ (polling) จุดสัมผัสเหล่านี้เป็นตัวกระตุ้นแบบดิจิทัลพูลอัพ (digital pull-up triggers) เมื่อมีสิ่งมากระทบ (strike) หน่วยประมวลผล (logic-engine) จะหยุดสัญญาณพัลส์ (pulse-stream) สำหรับแกนนั้นทันที
- ไฟสัญญาณวินิจฉัยแบบกระพริบ (Visual Diagnostic Strobe): ไฟ LED 6 ดวงให้การยืนยันด้วยแสง (phonic confirmation) แบบเรียลไทม์ของสถานะ "สุดระยะเคลื่อนที่ (End-of-Stroke)" แต่ละ LED สอดคล้องกับลิมิตบวกหรือลบของแต่ละแกน เป็นการสร้างอินเตอร์เฟซมนุษย์-เครื่องจักร (HMI) ระดับมืออาชีพสำหรับการตรวจสอบเส้นทางสัญญาณ
เราจะเห็นไฟ LED 6 ดวง ซึ่งใช้เพื่อบอกเราว่าลิมิตสวิตช์สุดระยะทำงานแล้ว นี่คือวิธีที่เราทำลิมิตสวิตช์สุดระยะด้วยอลูมิเนียมและกระดาษแข็ง
- ความมั่นคงเชิงจลนศาสตร์ของโครงสร้าง:
- การเชื่อมโยงเชิงจลนศาสตร์ใช้สายดึงแรงดึงสูงและกลยุทธ์การคืนตัวด้วยยางยืด (elastic-return heuristics) สำหรับการกลับสู่ตำแหน่งแกน การตรวจสอบ (Forensics) ความตึงของสายเคเบิลทำให้แน่ใจว่าแรงบิด (torque) จากมอเตอร์สเต็ปเปอร์ NEMA 17 ถูกแปลงเป็นการเคลื่อนที่เชิงเส้นได้อย่างมีประสิทธิภาพ โดยไม่มีการลื่นของสายพานหรือการสูญเสียเชิงกลแบบปรสิต (parasitic mechanical hysteresis)
ตอนนี้มีวิดีโอของโครงการมาให้ดูกัน:
สรุป
CNC-Logic นี่แหละตัวแทนของสุดยอด วิศวกรรมซีเอ็นซีแบบแมนนวล ด้วยการเชี่ยวชาญ นิติวิทยาศาสตร์สเต็ปเปอร์ไดรเวอร์ (Stepper-Driver Forensics) และ การประสานงานจากอนาล็อกสู่การเคลื่อนไหว (Analog-to-Motion Orchestration) ทำให้ TechnoFabrique ส่งมอบแพลตฟอร์มการวาดภาพที่แข็งแกร่ง ไม่ต้องใช้คอมพิวเตอร์ แสดงให้เห็นพลังของการควบคุมและวินิจฉัยโดยตรงที่มนุษย์เป็นศูนย์กลาง (human-in-the-loop)
วิสัยทัศน์เชิงเวกเตอร์: การเชี่ยวชาญการวัดระยะทางทางเมคคาทรอนิกส์ผ่านนิติวิทยาศาสตร์สเต็ปเปอร์
ถ้าชอบ อย่าลืมแวะไปดูผลงานอื่นๆ ของพวกเราได้นะ