ควบคุม Servo ด้วย Potentiometer
การเคลื่อนที่ทางกายภาพ: Servo ที่ควบคุมด้วยปุ่มหมุน
การควบคุม Servo ด้วย Potentiometer เป็นหนึ่งในโปรเจกต์สำหรับผู้เริ่มต้นที่น่าพึงพอใจที่สุด มันสร้างการเชื่อมโยงทางกายภาพโดยตรงระหว่างการเคลื่อนไหวของมือคุณกับการตอบสนองของมอเตอร์ ทำให้เป็นรากฐานที่สมบูรณ์แบบสำหรับกิมบอลกล้องและการบังคับเลี้ยวของหุ่นยนต์
หลักการทำงาน: Pulse Width Modulation
- การหมุน: คุณหมุน 10k potentiometer ตัว Arduino จะอ่านค่าตั้งแต่ 0 ถึง 1023
- การแปลงค่า: โค้ดใช้ฟังก์ชัน
map()เพื่อแปลงค่า 0-1023 นั้นให้เป็นมุมตั้งแต่ 0 ถึง 180 องศา - พัลส์: Arduino จะส่งพัลส์ไฟฟ้าเฉพาะ (PWM) ไปยัง Servo
- การเคลื่อนที่: วงจรอิเล็กทรอนิกส์ภายในของ Servo จะตีความพัลส์นั้นและเลื่อนเพลามอเตอร์ไปยังมุมที่ถูกต้องตรงกับตำแหน่งของปุ่มที่คุณหมุน
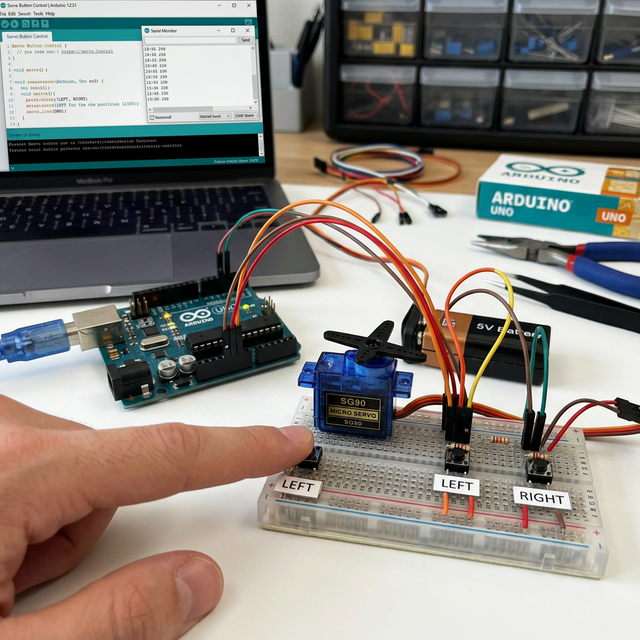
ส่วนประกอบฮาร์ดแวร์
- Arduino Uno/Nano: ตัวสร้างสัญญาณ PWM
- SG90 Micro Servo: อุปกรณ์เอาต์พุต
- 10k-ohm Potentiometer: อุปกรณ์อินพุตแบบอนาล็อก
- Breadboard และ Jumper Wires
ทำไมถึงต้องทำโปรเจกต์นี้?
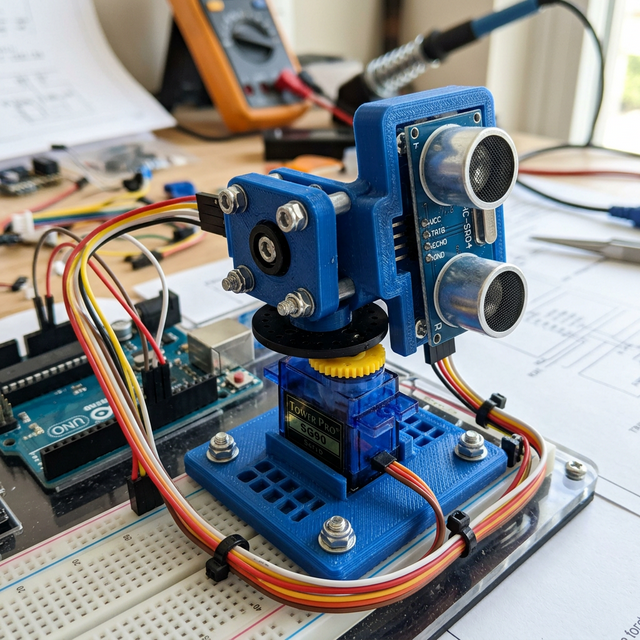
การตั้งค่านี้เป็นหัวใจของ Master-Slave systems ที่ใช้ในหุ่นยนต์อุตสาหกรรมและแขนผ่าตัด การเรียนรู้การประสานงานระหว่างอินพุตอนาล็อกและเอาต์พุต Servo จะทำให้คุณพร้อมที่จะสร้างข้อต่อที่ซับซ้อนยิ่งขึ้นสำหรับหุ่นยนต์ฮิวแมนนอยด์ หรือ Pan-Tilt Mounts สำหรับกล้องติดตาม