ชื่อโปรเจกต์: รถควบคุมด้วย Bluetooth
นี่คือส่วนประกอบที่ใช้

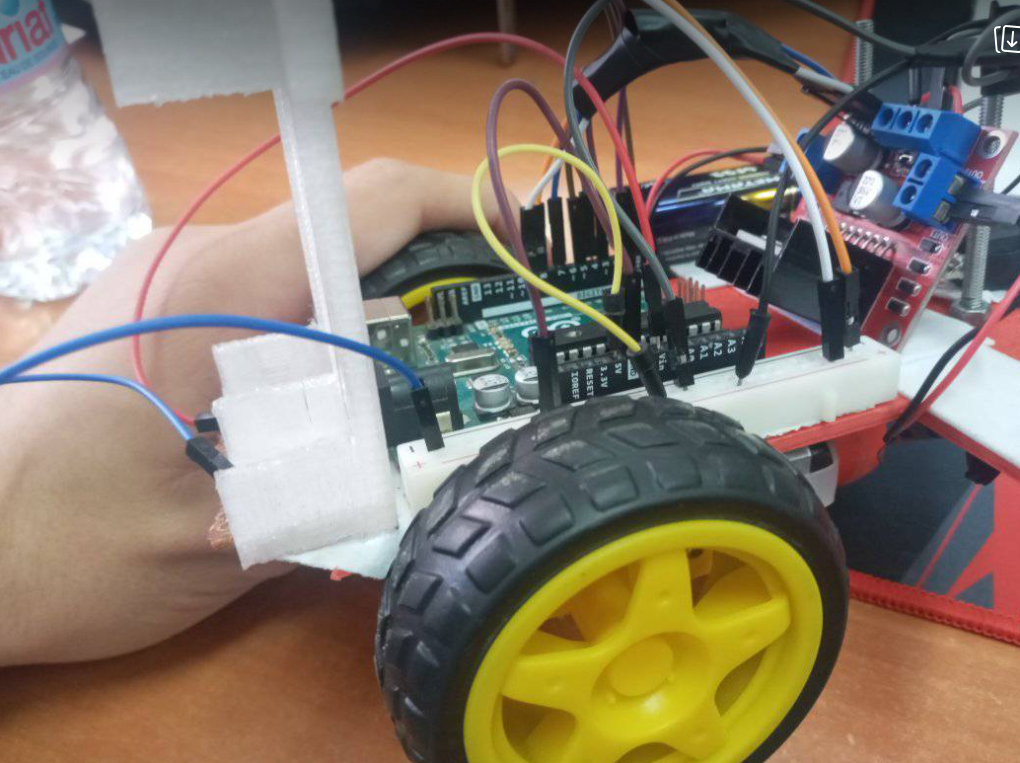
รูปที่ 1:
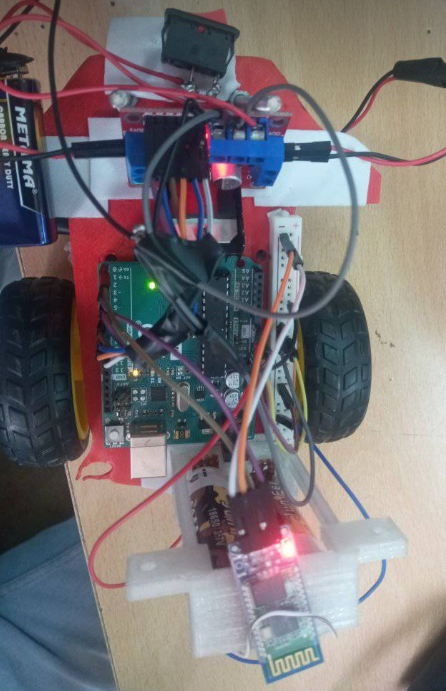
รูปที่ 2:
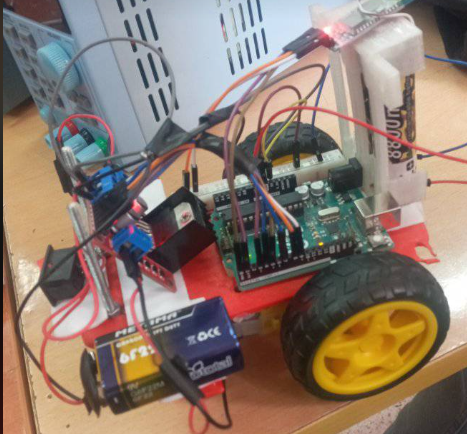
รูปที่ 3:
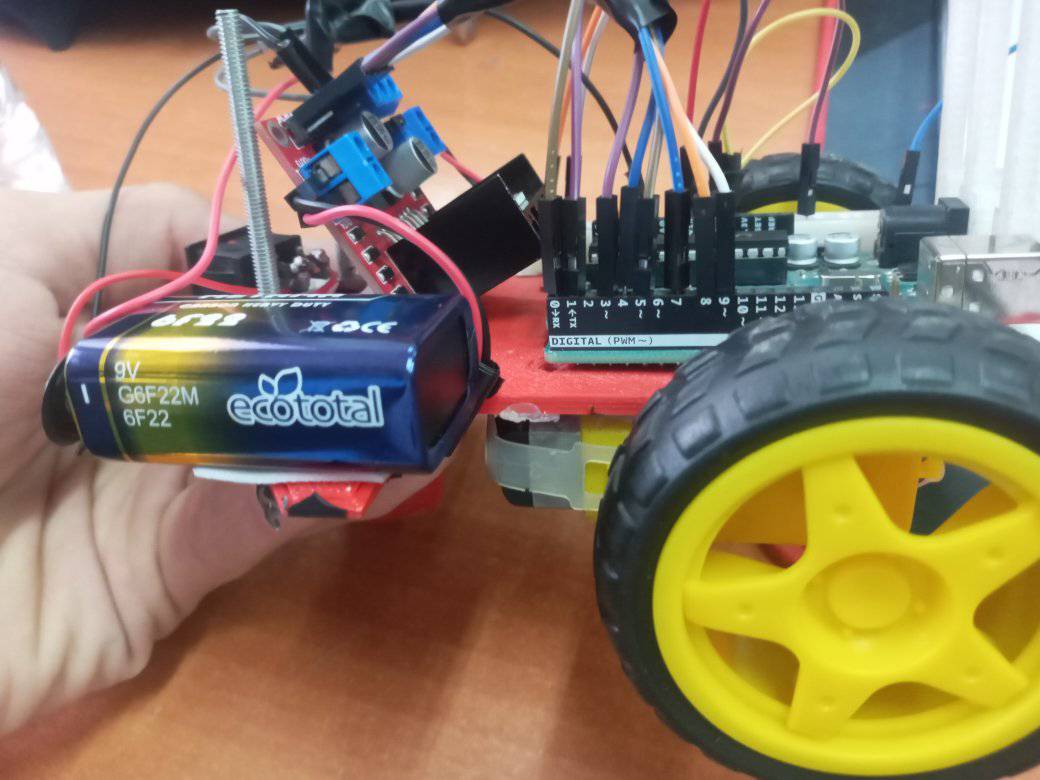
รูปที่ 4:

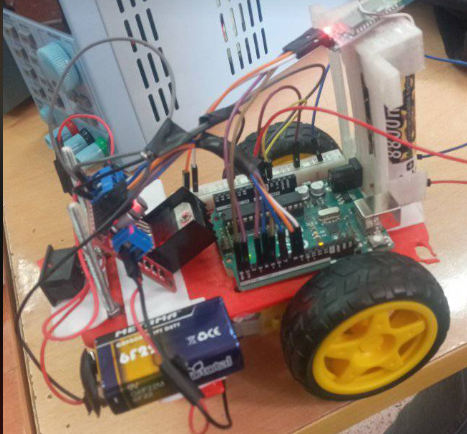
รูปที่ 5:
#รูปภาพนี้แสดงผลลัพธ์ที่ได้ แน่นอนว่ามีการตกแต่งเพื่อปรับแต่งเล็กน้อย แต่จะได้ผลลัพธ์เดียวกัน ทำตามขั้นตอนด้านล่างนี้แล้วคุณจะสามารถสร้างโปรเจกต์ของคุณได้
ความสามารถในการควบคุมสิ่งต่าง ๆ ด้วย Bluetooth ซึ่งอิงตามการสื่อสารแบบไร้สายนั้นดูเหมือนเวทมนตร์ รู้สึกตื่นเต้นมากที่ได้รู้ว่ามันทำงานอย่างไรและลองนำไปใช้จริง จึงได้คิดโปรเจกต์ดี ๆ อย่างรถยนต์ที่สามารถควบคุมได้ด้วยแอปบนโทรศัพท์มือถือ มันเป็นโปรเจกต์ที่เจ๋งและง่ายมาก!
โมดูล Bluetooth อีกฝั่งจะรับข้อมูลและส่งไปยัง Arduino ผ่านขา TX ของโมดูล Bluetooth (ขา RX ของ Arduino)
ขั้นตอนที่ 1: ประกอบวงจรตามที่แสดงในผังวงจรด้านล่าง คุณสามารถใช้ชุดแบตเตอรี่สำหรับจ่ายไฟให้กับวงจรขับ ซึ่งได้กล่าวถึงในส่วนประกอบ หรืออาจลองใช้ชุดแบตเตอรี่อื่น ๆ ก็ได้ แต่โปรดจำไว้ว่ามันควรจะให้แรงดันไฟฟ้าระหว่าง 7-12V และความจุอย่างน้อย 3500mAh นอกจากนี้ ให้ใช้แบตเตอรี่/ชุดแบตเตอรี่ที่แตกต่างกันสำหรับจ่ายไฟให้กับ Arduino และโมดูล Motor-Driver แต่ต้องแน่ใจว่าพวกมันมีจุด Ground ร่วมกัน แบตเตอรี่เป็นหนึ่งในสิ่งที่สำคัญที่สุดในโปรเจกต์นี้!..
ขั้นตอนที่ 2: คอมไพล์โค้ดด้านล่างใน Arduino-IDE และกดอัปโหลด แต่ก่อนอื่นต้องแน่ใจว่าคุณได้ถอดสาย RX ของ Arduino ออกจาก TX ของโมดูล Bluetooth (HC-05) เพราะการสื่อสารแบบ uart
communication.
ขั้นตอนที่ 3: ติดตั้งแอปพลิเคชันบนอุปกรณ์ Android ของคุณ แอปพลิเคชันนี้มีให้ดาวน์โหลดบน Play Store
ขั้นตอนที่ 4: จับคู่อุปกรณ์ Android ของคุณกับ HC-05 ผ่าน Bluetooth ตอนนี้ ให้คลิกที่ไอคอน Bluetooth และเลือกอุปกรณ์ของคุณจากรายการ
หาก คุณได้กำหนดค่า HC-05 คุณจะต้องตั้งรหัสผ่านใหม่ มิฉะนั้น ให้ลองใช้ 0000 หรือ 1234
ขั้นตอนที่ 5: ตอนนี้คุณได้ผ่านพ้นความยากลำบากมาแล้ว เพียงแค่นั่งพักผ่อนและใช้การควบคุมบนหน้าจอที่มีอยู่ในแอปเพื่อควบคุมรถ/หุ่นยนต์ คุณยังสามารถเปลี่ยนผังวงจรและโค้ด รวมถึงเพิ่ม Servo หรือแอคทูเอเตอร์อื่น ๆ เพื่อให้โปรเจกต์มีความซับซ้อนมากขึ้นและเรียนรู้เพิ่มเติมเกี่ยวกับ Arduino แต่โปรดจำไว้ว่าเมื่อคุณเพิ่มจำนวนแอคทูเอเตอร์ รถ/หุ่นยนต์ของคุณจะต้องการพลังงานจากแบตเตอรี่มากขึ้น ดังนั้นคุณควรเพิ่มแหล่งจ่ายไฟให้กับโปรเจกต์ของคุณ
ตรรกะที่ใช้:
ถ้า HC-05 ได้รับ '1' รถจะเคลื่อนที่ไปข้างหน้า
ถ้า HC-05 ได้รับ '3' รถจะเคลื่อนที่ถอยหลัง
ถ้า HC-05 ได้รับ '4' รถจะเลี้ยวขวา
ถ้า HC-05 ได้รับ '5' รถจะเลี้ยวซ้าย
ถ้า HC-05 ได้รับ '2' รถจะหยุด
การแก้ไขปัญหาเบื้องต้น:
HC-05 อาจเชื่อมต่อกับอุปกรณ์อื่น ๆ เพื่อป้องกันปัญหานี้ คุณต้องกำหนดค่าโดยใช้ AT command และเปลี่ยนรหัสผ่าน เพื่อให้คุณเป็นผู้ควบคุมเท่านั้น
ในการกำหนดค่าโมดูล Bluetooth HC-05 ให้ทำตามขั้นตอนดังนี้:
1- ตรวจสอบให้แน่ใจว่า HC-05 อยู่ในโหมด AT
2- พิมพ์ AT บน Serial Monitor แล้วกด Enter (บางเวอร์ชันใช้ Ctrl + Enter )
3- พิมพ์ AT+PSWD="รหัสผ่านที่ประกอบด้วยตัวเลข 4 ตัว เช่น 4321" แล้วกด Send
4- คุณจะมีรหัสผ่านเป็นของคุณเอง เพื่อไม่ให้เกิดปัญหาใด ๆ
รายละเอียดทางเทคนิคเพิ่มเติม
การเคลื่อนที่ด้วย Serial-over-Bluetooth
โปรเจกต์นี้เปลี่ยนแชสซี 4WD มาตรฐานให้กลายเป็นหุ่นยนต์ที่ควบคุมด้วยสมาร์ทโฟนที่คล่องตัว
- โปรโตคอลการสื่อสาร HC-05: Arduino จะรับฟังคำสั่งไบนารีที่มาจากแอป "Bluetooth Terminal" บนอุปกรณ์ Android/iOS
- สถาปัตยกรรม Motor Driver: ใช้ L298N Dual H-Bridge Arduino สร้างสัญญาณ PWM เพื่อควบคุมความเร็วของมอเตอร์ด้านซ้ายและขวาอย่างอิสระ ทำให้สามารถบังคับเลี้ยวแบบ "Tank Steering" ได้
คุณสมบัติด้านความปลอดภัย
- Signal Timeout: มีโค้ดสำหรับหยุดรถโดยอัตโนมัติหากการเชื่อมต่อ Bluetooth ขาดหายไปนานกว่า 500ms เพื่อป้องกันไม่ให้หุ่นยนต์ขับเคลื่อนออกนอกการควบคุม