สวัสดีเพื่อนหุ่นยนต์ทุกคน :)
เราเกิดไอเดียสร้างเจ้าหุ่นยนต์ตัวน้อยนี่ขึ้นมาเพื่อให้มันเป็นตัวแทนของวิชาเรียนแบบสหวิทยาการ (interdisciplinary) ในหลักสูตรของเรา โปรเจกต์นี้กลายเป็นการเดินทางที่ยาวนานกว่า 3 ปี และมีสองสิ่งที่ไม่เคยเปลี่ยน...นั่นคือความสนุก และ Arduino UNO นี่แหละ ;) ทั้งวาดรูป เลเซอร์คัท งานบัดกรี พิมพ์ 3D มันส์ไปหมด แถมยังเขียนไลบรารีสำหรับ Arduino เขียนแพ็กเกจ Python สร้างแอป Android กับ Windows อีก...มันกลายเป็นเรื่องราวที่ไม่มีวันจบซะแล้ว ด้วยความช่วยเหลือจากชุมชน (ก็คือพวกเธอนั่นแหละ) มันอาจกลายเป็นโปรเจกต์เพื่อการศึกษาระดับโลกได้เลยนะ การได้ทำงานกับโปรเจกต์นี้มันสนุกมาก การได้เรียนรู้เกี่ยวกับหัวข้อต่างๆ แล้วแบ่งปันให้กับโลก มันสุดยอดจริงๆ มาร่วมเป็นส่วนหนึ่งกับเราสิ...
เหล่า One ทั้งสี่ของเราขอต้อนรับด้วยคลิปสั้นๆ นี้...
...ยิ้มเข้าไว้ :)
Delta-Robot One
Delta-Robot One คือโปรเจกต์หุ่นยนต์โอเพ่นซอร์สสุดสมาร์ทที่ออกแบบมาเพื่อเชื่อมช่องว่างระหว่างงานอดิเรกของนักสร้าง (maker) กับระบบอัตโนมัติในอุตสาหกรรม ด้วยการผสมผสานการพิมพ์ 3D, การตัดเลเซอร์ และซอฟต์แวร์ขั้นสูง "One" จึงเป็นเหมือนระบบนิเวศ (ecosystem) ที่สมบูรณ์สำหรับการเรียนรู้เกี่ยวกับจลนศาสตร์แบบขนาน (parallel kinematics) และการทำงานหยิบ-วางความเร็วสูง
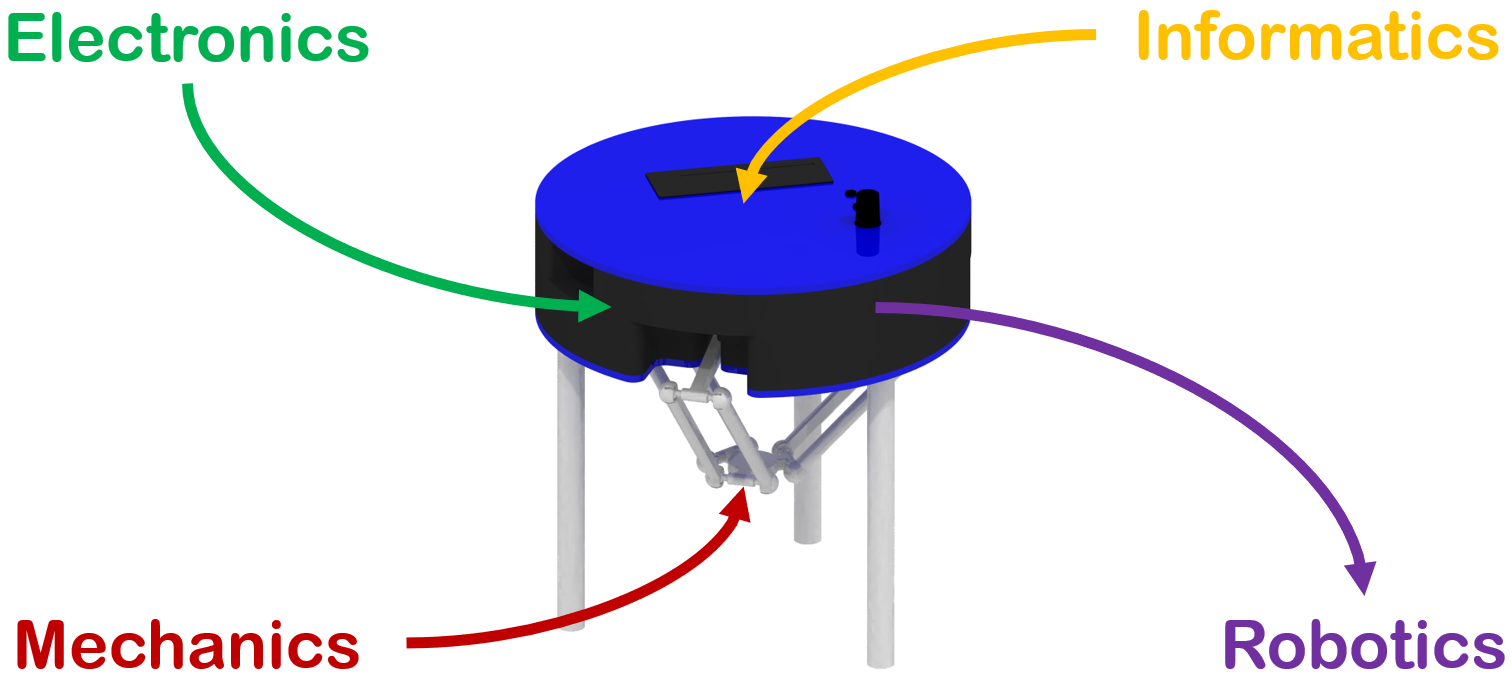
Delta-Robot One ออกแบบมาเพื่อนักเรียนและนักสร้าง (maker) โดยมีแนวคิดด้านการศึกษาเป็นหลัก ใครก็ตามที่ชอบเรียนรู้เกี่ยวกับหุ่นยนต์สามารถเข้ามาเจาะลึกในสาขาต่างๆ ได้ ไม่ว่าจะเป็นอิเล็กทรอนิกส์, กลศาสตร์ และวิทยาการคอมพิวเตอร์
มาแนะนำเจ้าหุ่นยนต์ตัวน้อยสุดฉลาดตัวนี้กัน ชื่อของมันคือ "One" เพราะมันรวมเอาหัวข้อทางเทคนิคมากมายไว้ในระบบเดียว หุ่นยนต์ประเภทนี้เรียกว่าเดลต้า (delta) และมันอยู่ในตระกูลของหุ่นยนต์แบบขนาน (parallel robots)
ภาพรวมหุ่นยนต์แบบขนานสมรรถนะสูง
Delta-Robot One เป็นผลงานชิ้นเอกของวิศวกรรมสหวิทยาการ ต่างจากแขนหุ่นยนต์แบบอนุกรม (serial) ทั่วไป Delta Robot ใช้แขนขนานสามแขนที่เชื่อมกับฐานร่วมกัน ทำให้ได้ความเร็ว ความแม่นยำ และความแข็งแรงที่เหลือเชื่อ โปรเจกต์นี้เป็นชุดเครื่องมือที่ครอบคลุมสำหรับการเชี่ยวชาญ Forward and Inverse Kinematics, การพัฒนาซอฟต์แวร์ข้ามแพลตฟอร์ม (Qt) และ การบูรณาการระบบกลไก มันเป็นแพลตฟอร์มที่ปรับขยายได้ เหมาะสำหรับทุกอย่าง ตั้งแต่การศึกษา STEM ในห้องเรียน ไปจนถึงงานจัดเรียงเบาๆ ในอุตสาหกรรม
ช่องทางโซเชียลมีเดีย
Instagram: @deltarobotone #deltarobotone
Facebook: Deltarobotone
Youtube: deltarobotone
Arduino Library
ระบบที่ใช้ Arduino จะช่วยให้คุณเริ่มต้นก้าวแรกได้ง่ายขึ้น มันเริ่มต้นไม่ยากเลย ดังนั้นทุกคนเลยถูกเชิญชวนให้มาใช้เวลากับเจ้าหุ่นยนต์สมาร์ทตัวนี้ดูสักหน่อย ถ้าอยากเจาะลึกมากขึ้นก็ทำได้ไม่มีปัญหา เพราะซอฟต์แวร์ของเราเป็นโอเพ่นซอร์ส
Sourcecode: >>> One System Library <<<
ติดตั้งไลบรารีโดยใช้ Library Manager ใน Arduino IDE แล้วเลือก...
-> OneSystemLibrary
ไลบรารีนี้มาพร้อมกับตัวอย่าง 20 ตัวอย่าง เพื่อแสดงฟังก์ชันการทำงานของอินเทอร์เฟซ

เรามีเดโมระบบเต็มรูปแบบ (อยู่ในตัวอย่าง) ให้ด้วย ถ้าเปิดใช้งานหุ่นยนต์เป็นครั้งแรก ให้ใช้ตัวอย่างนี้เพื่อดูว่า Delta-Robot One ทำงานยังไง มันมีฟังก์ชันให้เล่นเพียบ และคุณสามารถใช้หุ่นยนต์เป็นระบบสแตนด์อโลน แล้วไปลองเล่นแอปพลิเคชันมือถือและเดสก์ท็อปก่อนได้เลย
ถ้าอยากใช้โค้ด Arduino ตรงๆ ลองดูตัวอย่างพวกนี้เลยจ้า ตัวอย่างสั้นๆ ด้านล่างจะแสดงให้เห็นว่าโปรแกรมมิ่งอินเตอร์เฟซมันง่ายขนาดไหน:
สั่งหุ่นยนต์เคลื่อนที่ -> move.ptp(ตำแหน่ง x, ตำแหน่ง y, ตำแหน่ง z)
//Create the DeltaRobotOne-Object
DeltaRobotOne robot(0, 0, 0, 0, 0, 0, 0x27);
void setup()
{
//Robot setup
robot.setup();
//Power main circuit
robot.power.mainOn();
//Move the robot to the home position (X=0.0,Y=0.0,Z=85.0)
robot.move.ptp(home);
}
void loop()
{
//Move Z-Axis up
robot.move.ptp(0.0,0.0,70.0);
//Move Z-Axis
robot.move.ptp(0.0,0.0,100.0);
//Wait for 2 seconds
robot.functions.waitFor(2000);
}Python package
Delta-Robot One รับข้อมูลด้วยโครงสร้างที่เรียบง่ายมาก โครงสร้างนี้เรียกว่า one easy protocol ไปทำความเข้าใจกันหน่อยว่ามันทำงานยังไง Python package ตัวนี้เตรียมโปรโตคอลการสื่อสารพร้อมอินเตอร์เฟซระดับสูงไว้ให้แล้ว เพื่อให้ควบคุม Delta-Robot One จากระบบอื่นได้ง่ายๆ อย่างเช่นสั่งงานจาก Raspberry Pi ผ่าน USB นั่นเอง ใช้ตัวจัดการแพ็คเกจ Python ติดตั้ง one-easy-protocol บนระบบของน้องได้เลย:
#Python 2
pip install one-easy-protocol
#Python 3
pip3 install one-easy-protocolซอร์สโค้ด, บทเรียน และเอกสารประกอบของ One Easy Protocol:
>>>One Easy Protocol Python<<<
สำหรับเวอร์ชัน C++ ของ One Easy Protocol ดูได้ที่นี่:
>>>One Easy Protocol C++<<<

การประกอบหุ่นยนต์
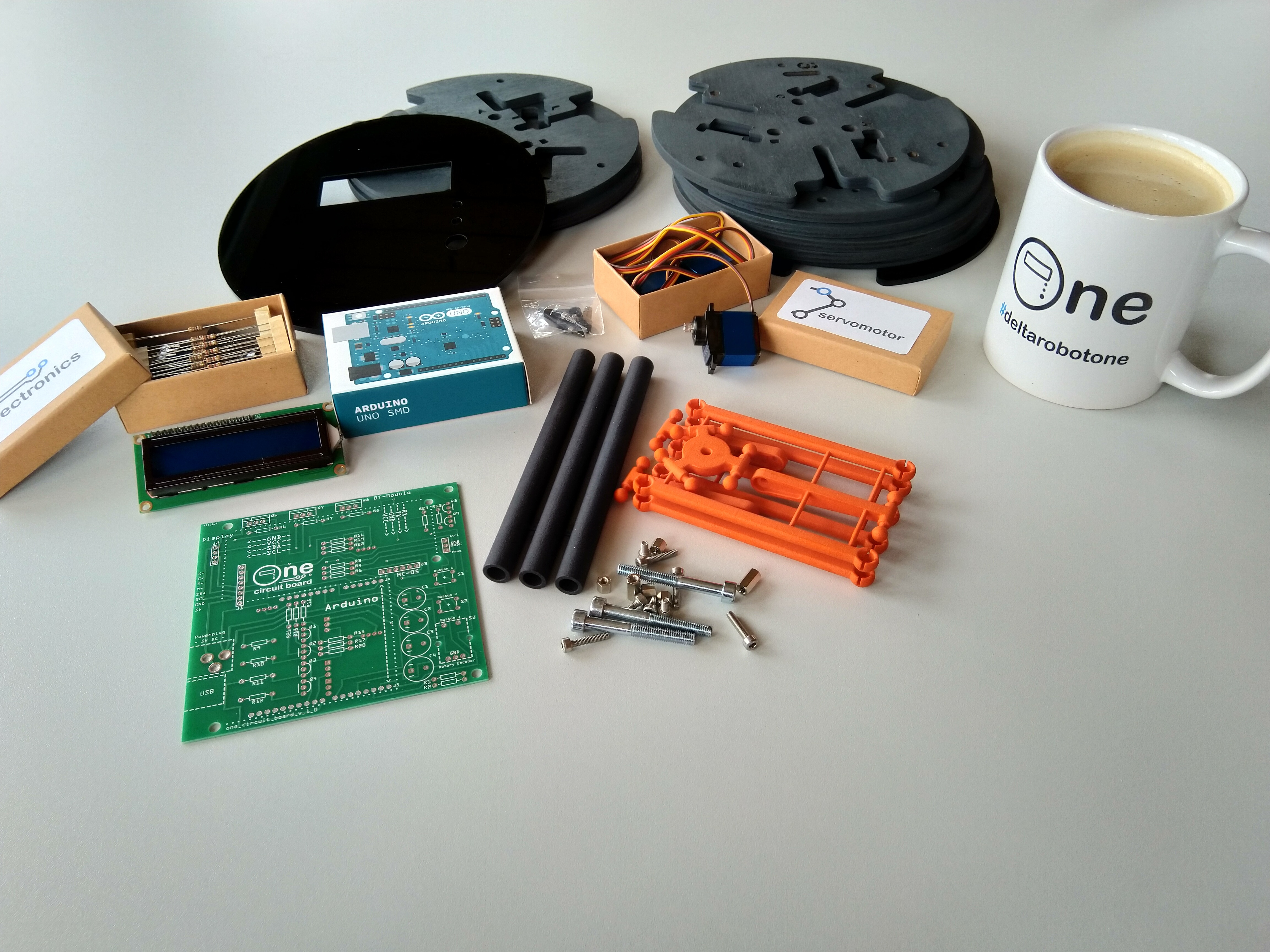
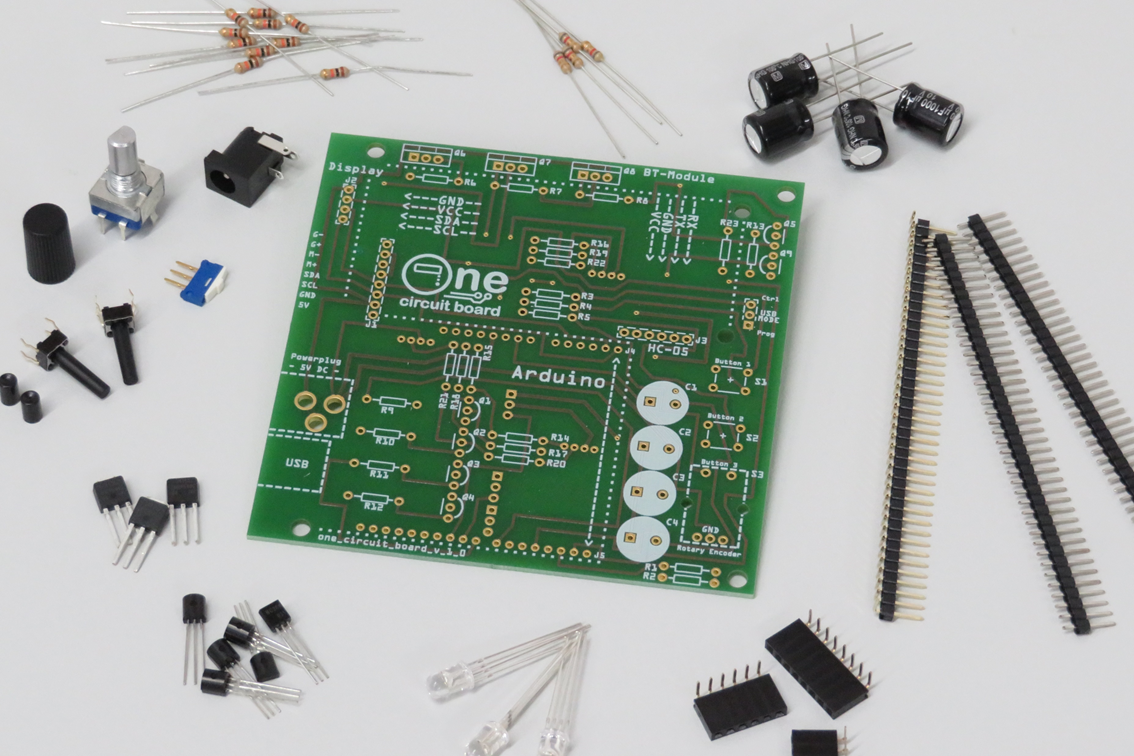
Delta-Robot One ออกแบบมาเป็นชุดประกอบ (Kit) ระบบเลเยอร์ของตัวโครงสร้างและโซลูชันกลไกแบบคลิกเข้าที่ ทำให้การประกอบเร็วและง่ายขึ้น แผงวงจรที่มีโครงสร้างชัดเจนทำให้การบัดกรีสะดวกสบายขึ้น เลือกสีของชิ้นส่วนบางส่วนเพื่อให้หุ่นยนต์มีลุคเป็นของตัวเอง สรุปแล้วการสร้างหุ่นยนต์ตัวนี้จะมอบประสบการณ์ปฏิบัติจริงที่สั้น ได้ความรู้ และน่าสนใจให้กับน้อง ตอนนี้ถึงเวลาสร้าง One ของตัวเองแล้ววว!
จะประกอบหุ่นยนต์ยังไง? ไม่ต้องห่วง พี่ๆ เค้าทำ wiki ไว้ให้แล้ว...
Wiki: >>>How to build you robot<<<
วิดีโอประกอบหุ่นยนต์
เลเยอร์
>>>Documentation<<<
>>>Files<<<
จะได้ชิ้นส่วนเลเยอร์ยังไงดีวะ? มีหลายวิธีเลยจ้า...
- ไปใช้เลเซอร์คัตเตอร์ที่ Techshop/Makerspace หรือที่โรงเรียน/มหาลัยตัวเองสิ
- พวกพี่เคยสั่งจากร้าน cutcraft มาแล้วสองสามรอบ เลยแนะนำได้ว่าบริการเค้าใช้ได้นะ
- ยังไม่เคยลอง แต่คิดว่าใช้เครื่องพิมพ์ 3D ก็สร้างเลเยอร์พวกนี้ได้เหมือนกันแหละ
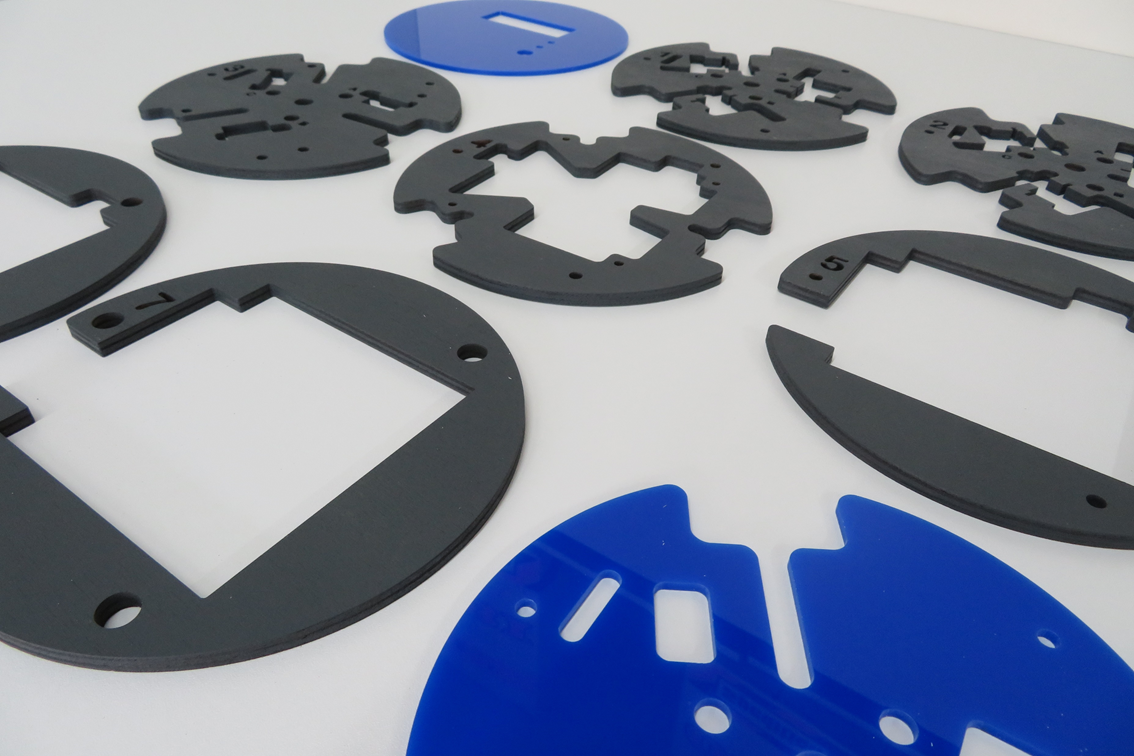
ปล่อยจินตนาการไปเลยน้อง ออกแบบเองซะเลย ให้มันเป็นหุ่นยนต์เฉพาะตัวของเราเอง มาทำให้โลกหุ่นยนต์มีสีสันกัน...

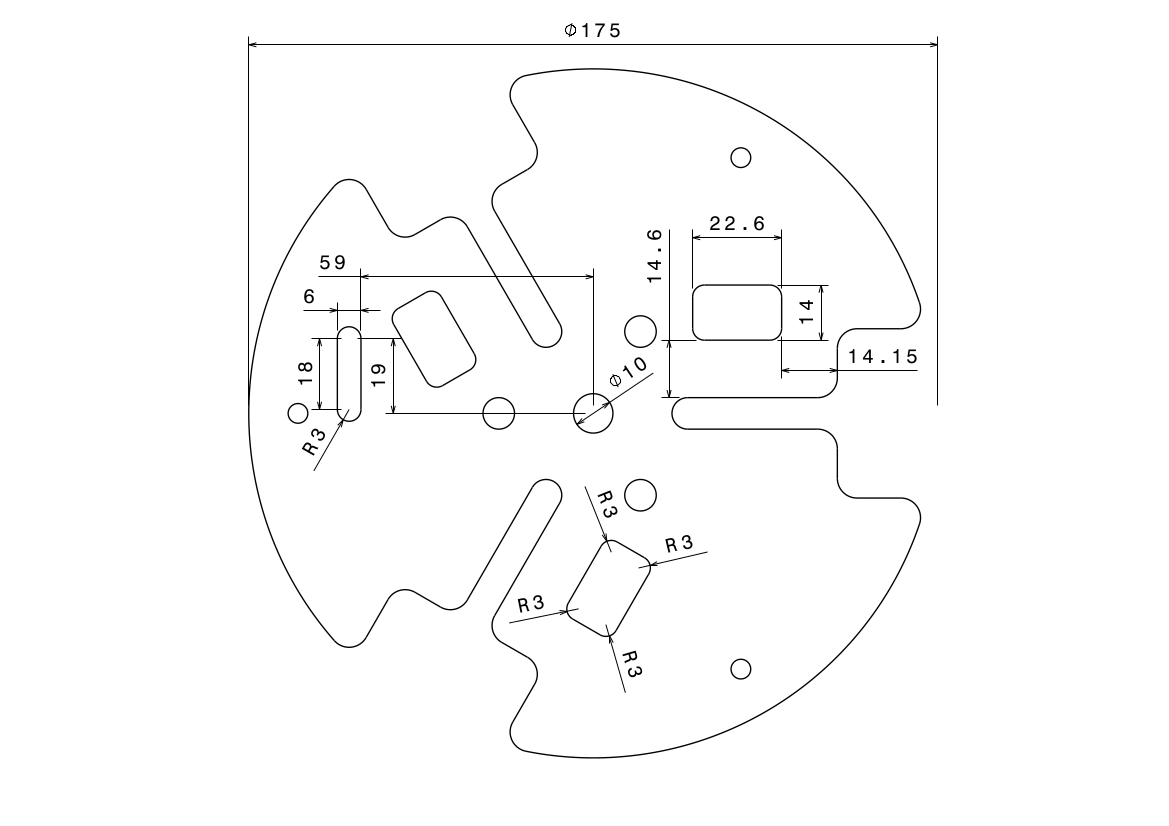
แบบแปลนทั้งหมดของระบบเลเยอร์มีให้ดาวน์โหลดนะ...
>>>แบบแปลน (Drawings)<<<
อิเล็กทรอนิกส์ (Electronics)
>>>รายการชิ้นส่วน (Partlist)<<<
>>>ไฟล์ต่างๆ (Files)<<<
จะได้แผงวงจร (Board) ยังไง? ชิลๆ...
...พวกพี่อัพโหลดแบบแผงวงจรของเราไว้ที่ aisler.com แล้ว น้องแค่ต้องไปที่ลิงก์นั้น สร้างบัญชี แล้วก็สั่งแผงวงจรได้ในราคาสบายกระเป๋าเลย
ลิงก์ร้านค้า: >>>One Circuit Board<<<
จะหาชิ้นส่วนอิเล็กฯ ได้ที่ไหน? ของพวกนี้เป็นชิ้นส่วนมาตรฐานทั้งนั้น...
- ลองสำรวจคลังชิ้นส่วนในห้องแล็บตัวเองดูก่อนนะ ;)
- ใช้รายการชิ้นส่วนจากลิงก์ด้านบน แล้วไปเช็คร้านค้าที่แนะนำไว้ได้เลย
- มีร้านขายเยอะแยะ แถมที่โรงเรียนหรือมหาลัยน้องอาจจะมีให้ด้วย
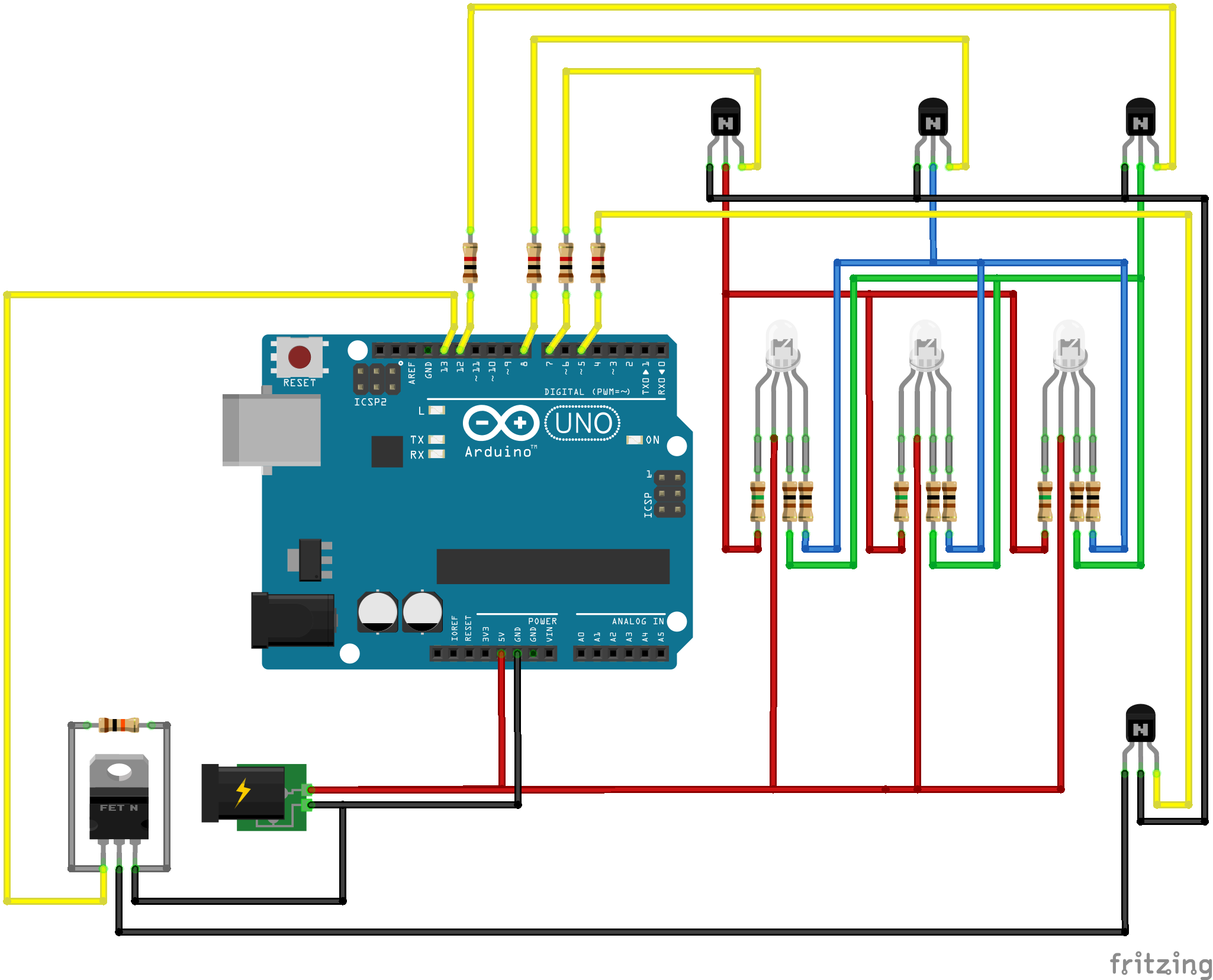
แผนผังวงจร (Schematics) ทั้งหมดก็มีในรูปแบบ Fritzing ด้วยนะ...
>>>แผนผังวงจร (Schematics)<<<
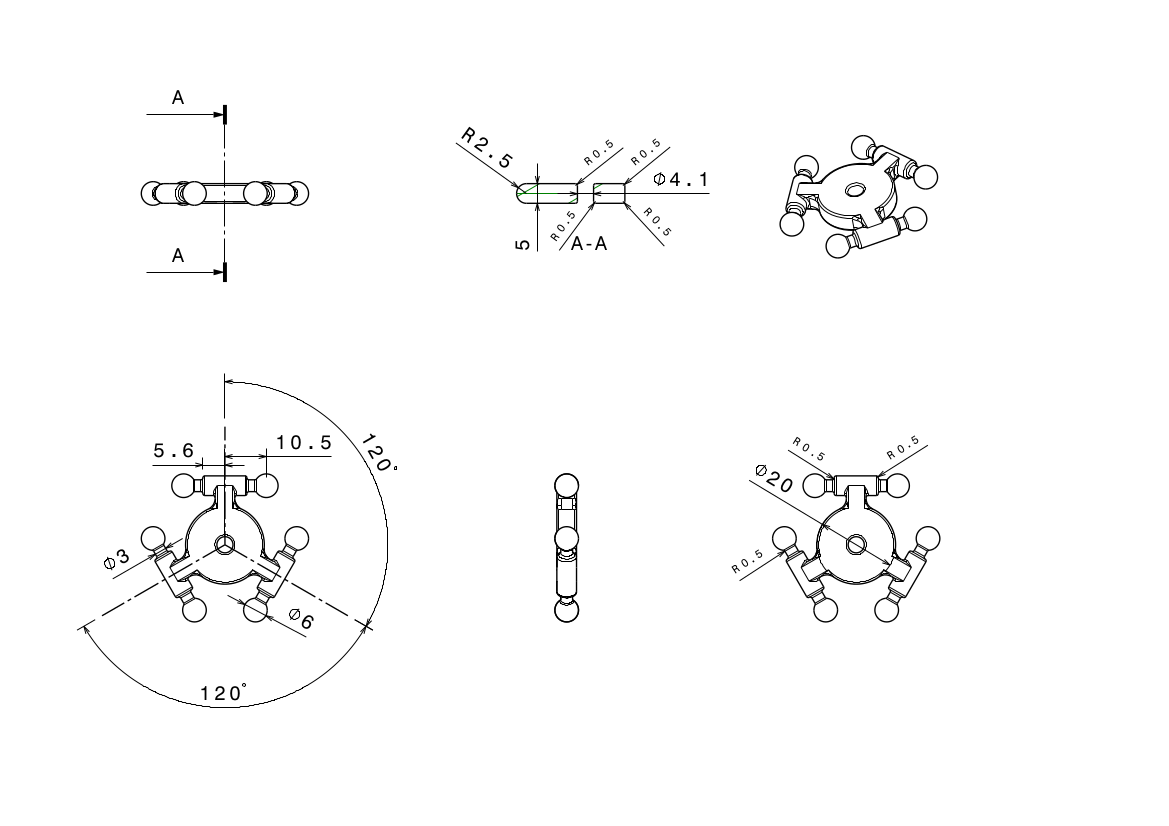
กลไก (Mechanics)
>>>เอกสารประกอบ (Documentation)<<<
>>>ไฟล์ต่างๆ (Files)<<<
จะหาชิ้นส่วนกลไกได้ที่ไหน? ไม่มีปัญหา...
...พวกพี่ทดลองใช้บริการ i.materialise.com มาแล้ว และสร้างรายการสินค้าไว้ให้ น้องสามารถสั่งซื้อชิ้นส่วนที่ต้องการได้ง่ายๆ ผ่านลิงก์เหล่านี้:
>>>Kinematics Package<<<
>>>Pillar Package<<<

แบบแปลนทั้งหมดของชิ้นส่วนกลไกมีให้ดาวน์โหลดนะ...
>>>แบบแปลน (Drawings)<<<
ฮาร์ดแวร์และโครงสร้างการเคลื่อนไหว (Kinematic Tier)
- Arduino UNO: ทำหน้าที่เป็น "Real-Time Motion Controller" จัดการคำนวณตำแหน่งแบบตรีโกณมิติซับซ้อนเพื่อให้หุ่นยนต์เคลื่อนที่ใน 3 มิติ (XYZ) โดยใช้การหมุนของเซอร์โว ผ่านไลบรารีเฉพาะทาง
OneSystemLibrary - เซอร์โวเกียร์โลหะ (MG92B): เป็นตัวขับเคลื่อนหลัก ให้แรงบิดสูงและความละเอียดดี พร้อมสู้งาน "Pick-and-Place" แบบเร็วๆ ได้แบบไม่สั่นคลอน
- โครงสร้างคอมโพสิต (อะคริลิค & ชิ้นส่วนพิมพ์ 3D): ออกแบบแบบ Delta หลายชั้น เบาแต่แข็งแรง ระบบล็อกแบบคลิกช่วยให้ข้อต่อเคลื่อนไหวลื่น ไม่ติดขัด
- ศูนย์กลางสื่อสาร (HM-10 Bluetooth): ควบคุมไร้สายจากมือถือหรือคอมด้วยความหน่วงต่ำ ผ่าน "One Easy Protocol" ง่ายๆ