บทนำ
แขนหุ่นยนต์นี้ใช้ **servo motor** ในการเคลื่อนที่ ที่ปลายแขนมีปากกา ในตอนแรก คุณสามารถหมุน **potentiometer** เพื่อเลื่อนแขน เมื่อแขนอยู่ในตำแหน่งที่คุณต้องการ ให้กดปุ่ม แล้ว **Arduino** จะแสดงตำแหน่งของ **servo** บน **serial monitor** จากนั้น ให้รัน **sketch** อื่นแล้วใส่ค่าเหล่านั้นเข้าไป แขนก็จะเคลื่อนที่ไปยังตำแหน่งที่คุณต้องการได้เอง โปรเจกต์นี้สร้างขึ้นโดยใช้ **Arduino Mega 2560**
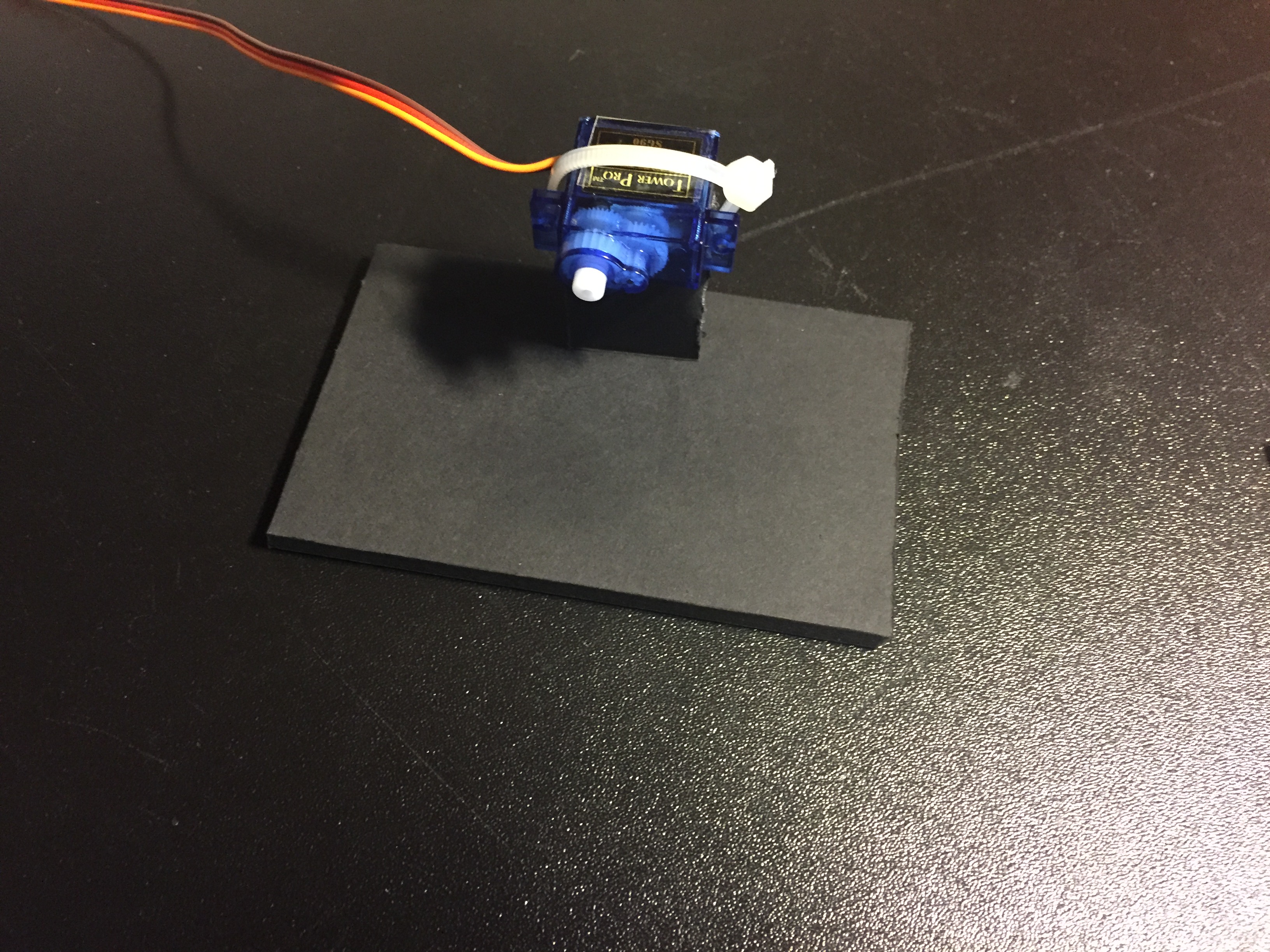
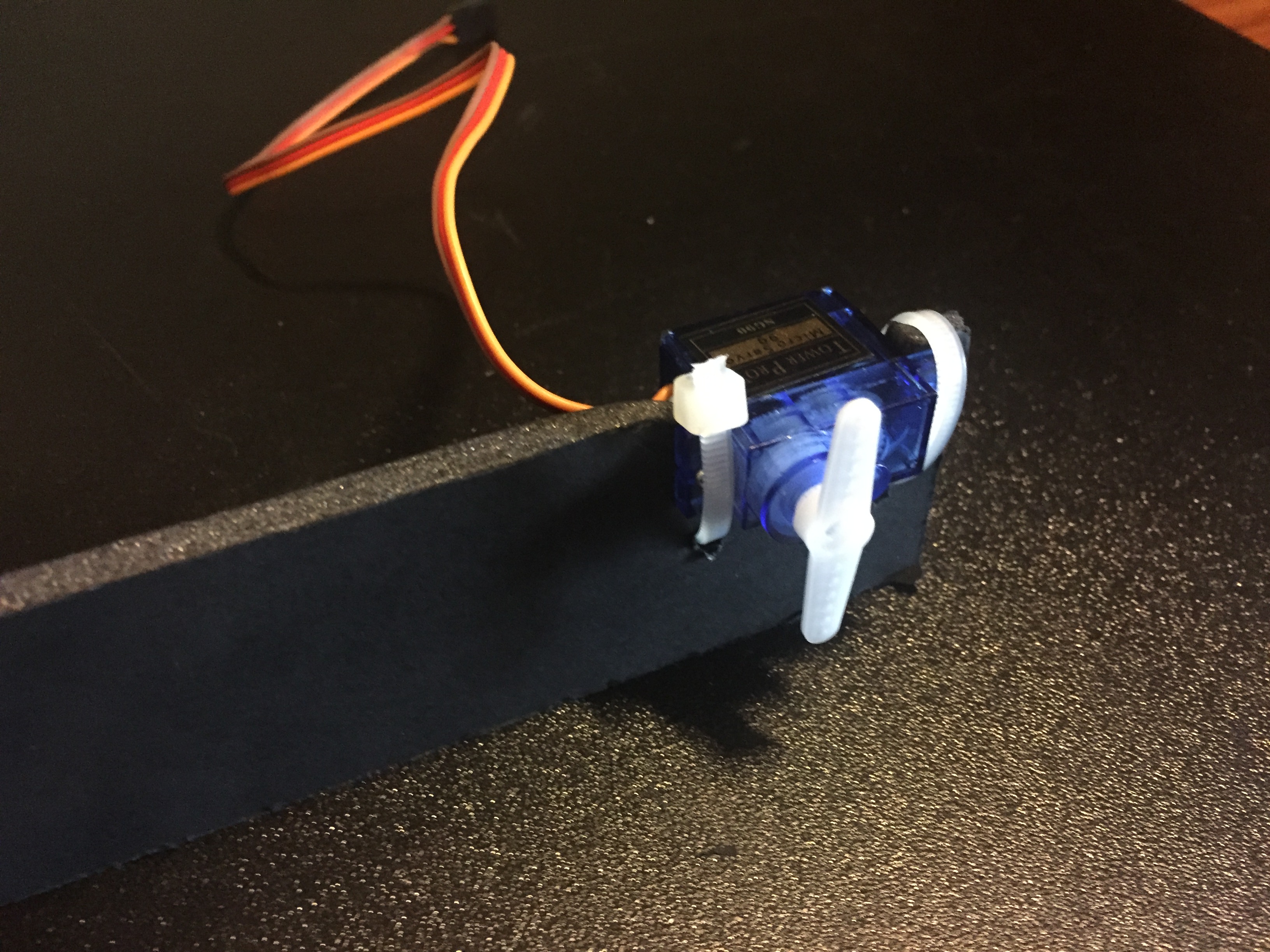
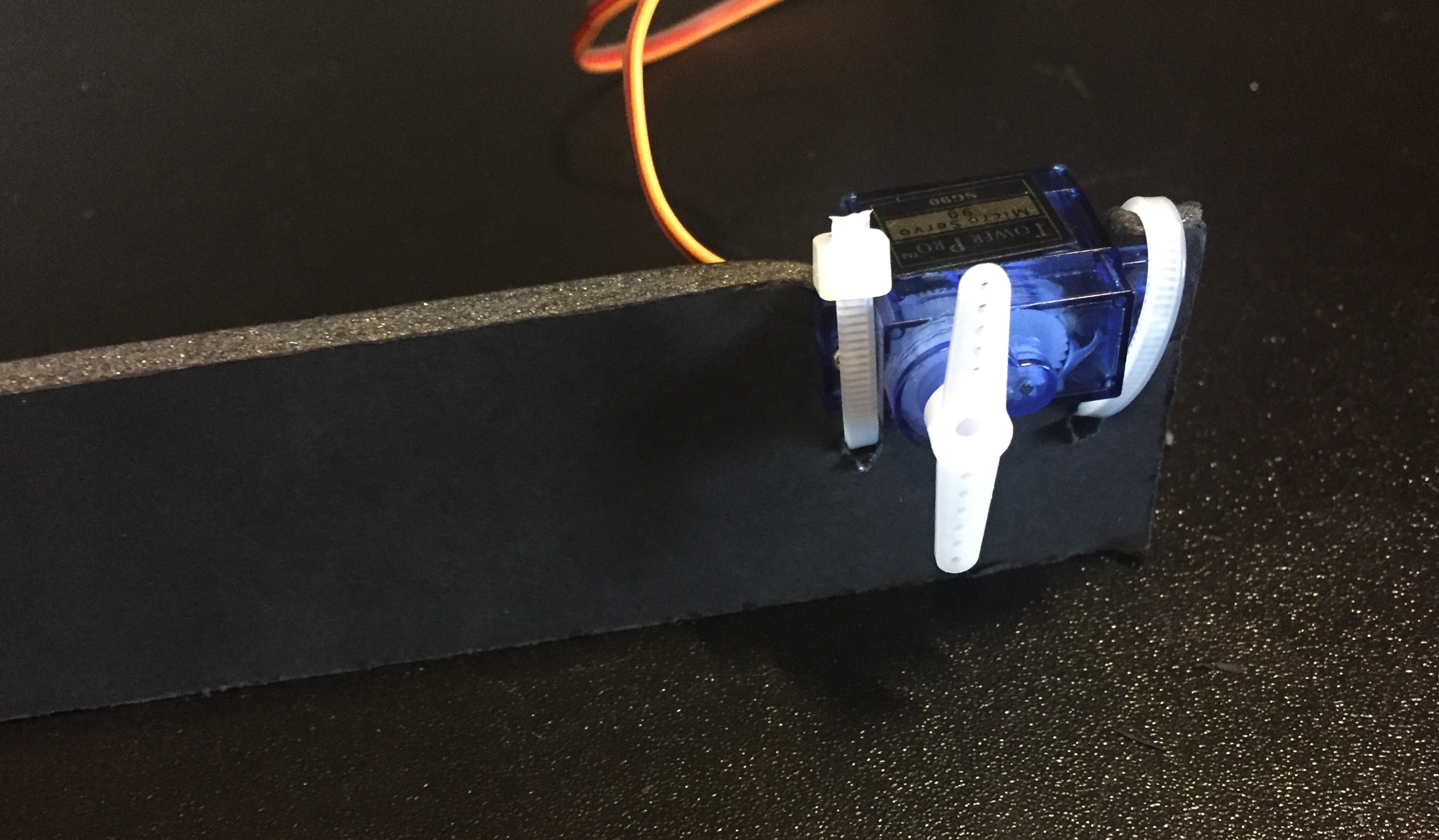
ฐาน
ติดตั้ง **servo** บนฐานโดยใช้เทปกาวและเคเบิลไทร์
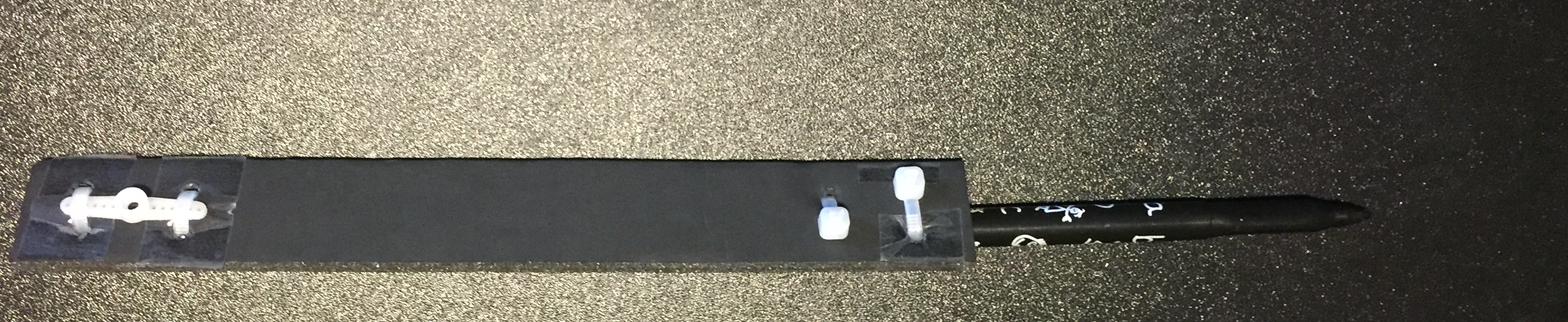
ส่วนแขนที่หนึ่ง
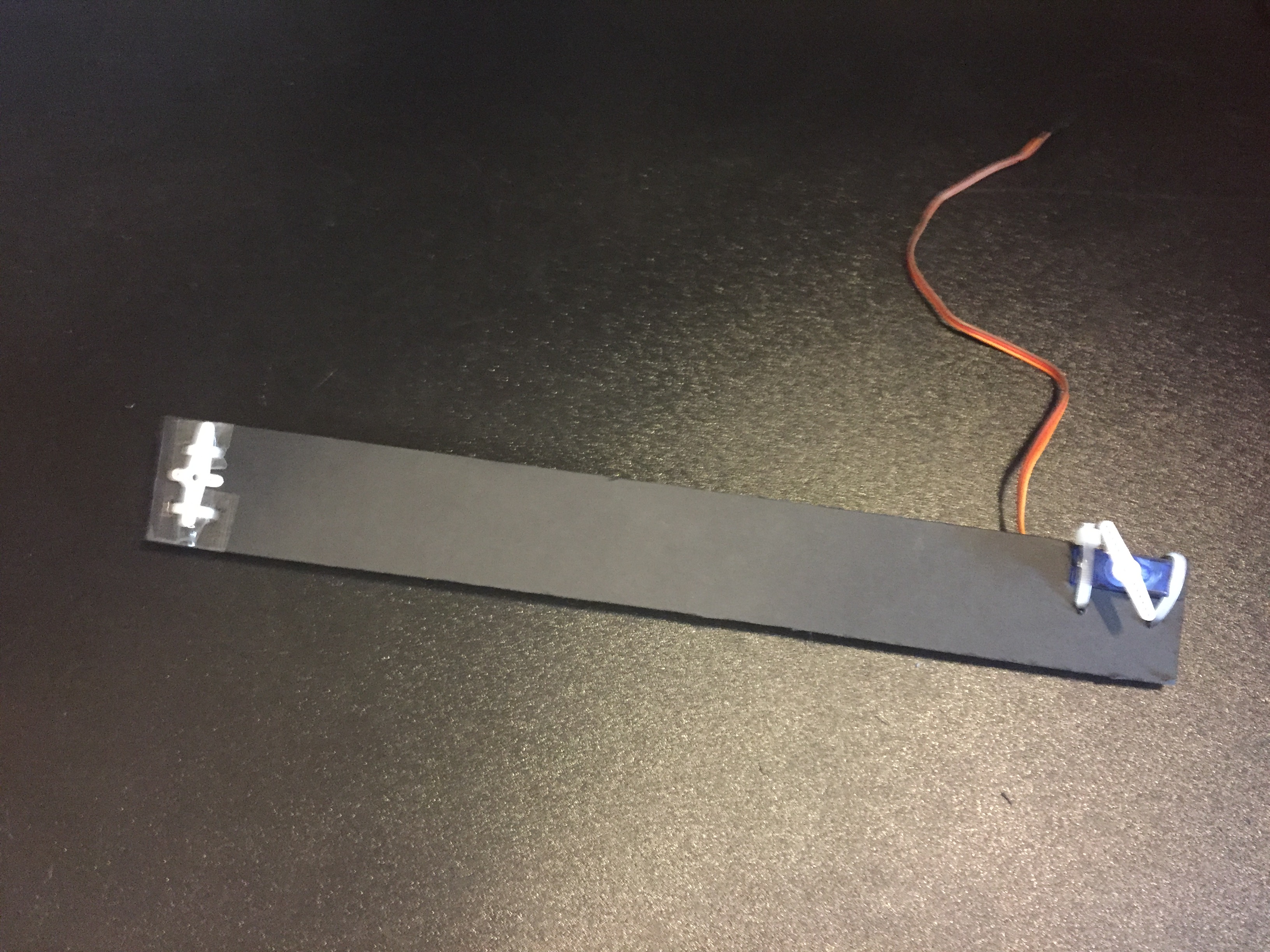
ส่วนแขนที่สอง
ส่วนนี้สั้นกว่า เนื่องจากผมเริ่มกังวลเรื่องกำลังยกของ **servo motor**
รันโค้ดสำหรับปรับเทียบเพื่อรับค่า **servo** จากนั้นนำไปใส่ในโค้ดสำหรับเคลื่อนที่
รายละเอียดทางเทคนิคเพิ่มเติม
การพล็อตแบบระนาบ 2 มิติที่แม่นยำ (Precise 2D Cartesian Plotting)
Drawing Robot (มักจะเป็น pen-plotter หรือ "Polargraph") ใช้การเคลื่อนที่เชิงอัลกอริทึมเพื่อแปลงภาพดิจิทัลให้เป็นงานศิลปะเชิงกายภาพ
- Bipolar Stepper Drive: ควบคุมโดย A4988 stepper drivers สองตัวและ Arduino Uno เฟิร์มแวร์จัดการ "Microstepping" (1/16th steps) เพื่อให้ได้ความแม่นยำ 0.01 มม. บนพื้นผิวแนวตั้งหรือแนวนอน
- G-Code Parsing: (เวอร์ชันขั้นสูง) Arduino รับฟังข้อความ G-code มาตรฐานของ CNC ผ่าน Serial และคำนวณจำนวนขั้นตอนการหมุนที่จำเป็นสำหรับแต่ละมอเตอร์ เพื่อให้ปากกาเคลื่อนที่เป็นเส้นตรงหรือเส้นโค้งได้อย่างสมบูรณ์แบบ
อินเทอร์เฟซเชิงสร้างสรรค์
- Pen-Lift Actuation: ใช้ micro servo ขนาดเล็กเพื่อยกและลดปากกาวาดรูป ทำให้สามารถสร้างภาพวาดแบบเวกเตอร์ที่ซับซ้อนและมีหลายเลเยอร์ได้