วิดีโอโปรเจกต์ของพี่
มาดูกันว่าพี่สร้างเจ้าริคตัวนี้ยังไง!
ดูขั้นตอนการสร้างโปรเจกต์ (0:00) และเจ้าริคทำงานครั้งแรก (5.50) กัน
มาดูการทดสอบนอกสถานที่ครั้งแรกกับริคกัน!
มาดูการใช้งานริคแบบไม่มีตัวแบบมนุษย์อยู่ตรงกลาง!
มาดูการใช้งานริคกับฟองสบู่กัน!
อย่าลืมกดติดตามช่อง YouTube ของพี่ เพื่อดูวิดีโอใหม่ล่าสุดทั้งหมด รวมถึงการทดลองต่างๆ กับเจ้าริคกล้องตัวนี้ด้วยนะ!
พี่สร้างมันยังไง
นี่คือโปรเจกต์ Arduino และ Physical Computing ครั้งแรกของพี่เลย เป็นส่วนหนึ่งของหลักสูตร BSc Product Design ที่ Middlesex University London งานที่ได้รับคือ:
"พัฒนาประสบการณ์ผู้ใช้ใหม่สำหรับผู้ใช้กล้องสมาร์ทโฟน ระบบควรทำให้ผู้ใช้สามารถถ่ายวิดีโอสุดเจ๋งที่แต่ก่อนทำไม่ได้ หรือทำได้แค่กับระบบมืออาชีพราคาแพงเท่านั้น"

พี่อยากโฟกัสไปที่เอฟเฟกต์ Bullet time เทคนิคภาพที่โด่งดังจากหนังเรื่อง The Matrix และล่าสุดถูกใช้ใน Sherlock ของ BBC

เป็นส่วนหนึ่งของโปรเจกต์ พี่จำเป็นต้องใช้ Arduino และทรัพยากร Physical Computing อื่นๆ ที่มีอยู่
พี่ดูหลายวิธีเพื่อให้ได้เอฟเฟกต์ที่ต้องการ แนวคิดแรกคือสร้างอุปกรณ์ที่สามารถห้อยจากจุดหมุนที่แขวนอยู่ (เช่น เพดานหรือต้นไม้) แล้วหมุนรอบตัวผู้ใช้ที่ยืนอยู่ด้านล่าง แต่มันก็ถูกชี้ให้เห็นอย่างรวดเร็วว่าอาจเป็นความเสี่ยงต่อผู้ใช้และจำกัดพื้นที่ใช้งาน
พี่จึงมองหาเทคโนโลยีที่มีศักยภาพที่จะนำมาใช้ เพื่อให้ได้ความเร็วสูงที่จำเป็นสำหรับการถ่ายเอฟเฟกต์ Bullet time รวมถึงวิดีโอ 360º รอบทิศทางแบบอื่นๆ
ภาพรวมโปรเจกต์และเจาะลึกเทคนิค
"Drone-Cycle" นี่คือเครื่องมือระดับโปรสำหรับงานภาพยนตร์ ที่ออกแบบมาเพื่อให้เอฟเฟกต์ "Bullet-Time" เป็นเรื่องที่ใครๆ ก็ทำได้ โปรเจกต์นี้ดัดแปลงฐานเก้าอี้สำนักงานหนักๆ ให้กลายเป็นจุดหมุนกลางที่เสถียรสุดๆ ขับเคลื่อนด้วย มอเตอร์เบรสเลสเอาท์รันเนอร์ 1000KV โดยการผนวก สะพานสื่อสารไร้สาย XBee เข้าไป ทำให้เราสามารถควบคุมการทำงานจากระยะไกลได้ หมุนด้วยความเร่งสูงเพื่อถ่ายภาพต่อเนื่อง 360 องศารอบตัวแบบได้อย่างลื่นไหล
- ระบบขับเคลื่อนเบรสเลสและ ESC:
- มอเตอร์ A2212 Outrunner: ไม่เหมือนมอเตอร์แบบแปรงถ่าน A2212 ใช้การสลับขั้วด้วยอิเล็กทรอนิกส์ล้วนๆ Arduino จะส่งสัญญาณ PWM 50Hz (พัลส์กว้าง 1000µs ถึง 2000µs) ไปให้ ESC 30A จากนั้น ESC ก็จะสร้างสัญญาณไฟฟ้ากระแสสลับ 3 เฟสเพื่อขับมอเตอร์นั่นเอง
- เปลี่ยนแรงขับเป็นแรงบิด: มอเตอร์ตัวนี้ติดตั้งใบพัดแบบโดรนเอาไว้ แต่แทนที่จะใช้สร้างแรงยก ใบพัดนี้จะสร้างแรงผลักในแนวนอนเพื่อให้เกิดโมเมนตัมการหมุน ซึ่งต้องมากพอจะเอาชนะแรงเสียดทานสถิตของจุดหมุนและเหวี่ยงแขนกล้องให้หมุนด้วยความเร็วสูงได้
- ประตูสั่งการไร้สาย (XBee Series 2):
- โครงข่าย Zigbee Mesh: ระบบนี้ใช้ Arduino 2 โหนด โหนด "รีโมท" จะอ่านค่าจากโพเทนชิออมิเตอร์แล้วส่งข้อมูลผ่านลิงก์ 2.4GHz IEEE 802.15.4 ส่วนโหนด "บนเครื่อง" จะรับข้อมูลแบบเรียลไทม์เพื่อปรับค่าเร่ง (throttle) ของ ESC
- ต้านทานสัญญาณรบกวน: การใช้ XBee Series 2 ทำให้การเชื่อมต่อมั่นคง แม้อยู่ในสภาพแวดล้อมที่มีสัญญาณ Wi-Fi รบกวนเยอะๆ เพื่อให้ผู้ควบคุมสามารถสั่ง "ดับ" (Kill) มอเตอร์ได้ทันทีหากผู้ใช้งานเสียสมดุล
- กลไกการเคลื่อนที่และวิศวกรรมความแม่นยำ:
- จุดหมุนกลาง: เพื่อให้ผู้ใช้ยืนนิ่งอยู่ตรงกลางการหมุนได้ เราจึงใช้ฐานเก้าอี้โลหะหล่อเป็นแกนหลัก จากนั้นทำปลอกเหล็กด้วยเครื่องกลึง ซึ่งภายในมี ตลับลูกปืนเข็ม (Needle Roller Pin Bearings) 2 ชุด ทำให้แขนยื่นสามารถหมุนได้ด้วยแรงเสียดทานต่ำสุดและไม่มีการโยกด้านข้าง
- ปรับค่าโมเมนต์ความเฉื่อย: เราติดตั้งชุดอิเล็กทรอนิกส์และแบตเตอรี่ไว้ใกล้จุดหมุนกลางให้มากที่สุด เพื่อลด 'น้ำหนักที่เหวี่ยง' ส่วนสมาร์ทโฟนจะถูกวางไว้ที่ปลายสุดของแขนขาตั้งกล้อง เพื่อเพิ่มรัศมีการหมุนให้ได้ภาพที่กว้างขึ้น
ต้นแบบแรกเริ่ม
ตอนแรกผมทดสอบการทำงานของ Arduino และมอเตอร์โดรนด้วยโค้ด Fade ง่ายๆ จากตัวอย่างพื้นฐานของ Arduino ครับ
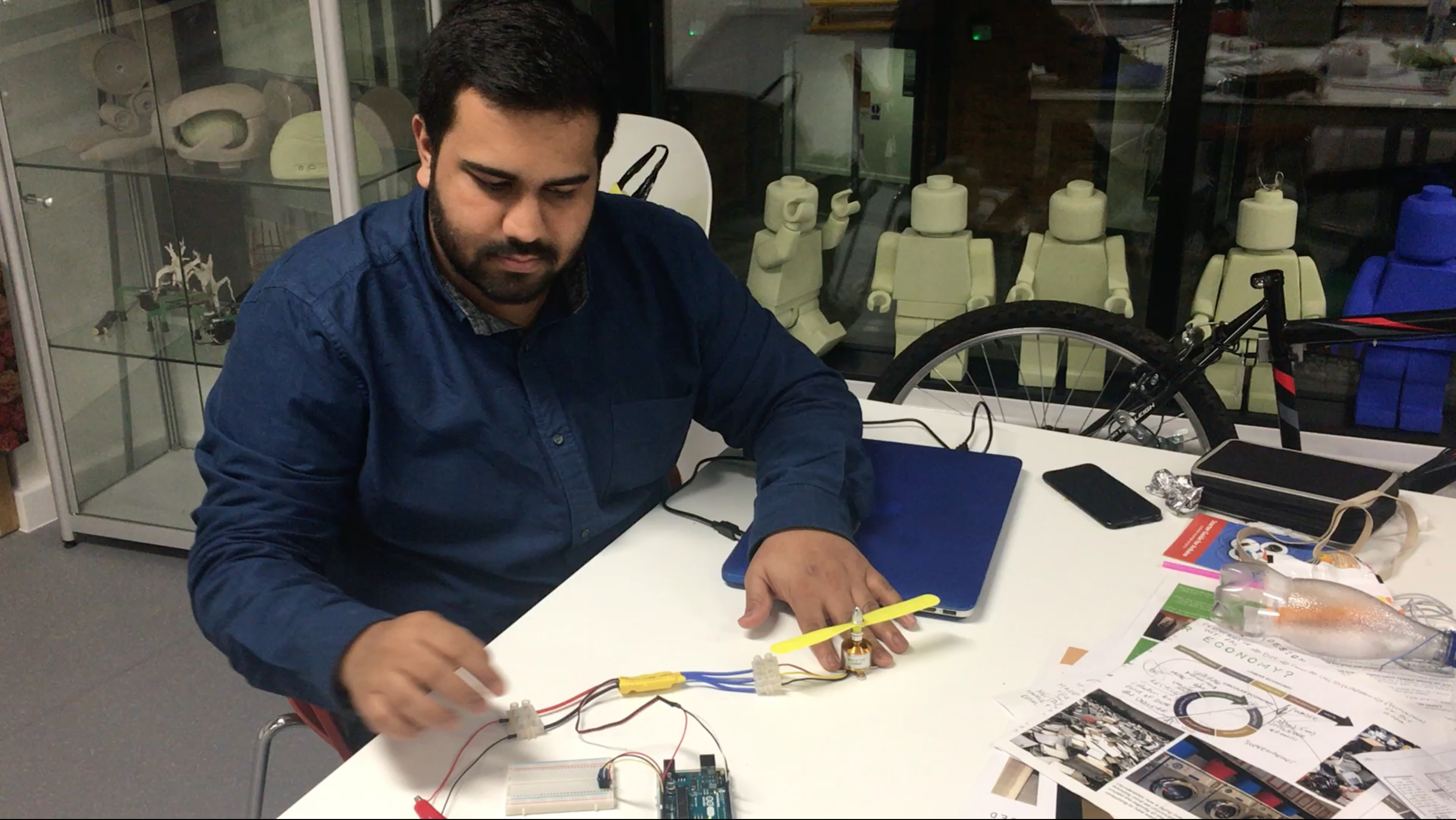
จากนั้นผมก็มองหาวิธีทำอุปกรณ์ที่ไม่ต้องพึ่งสภาพแวดล้อมเฉพาะเพื่อให้มันทำงาน และก็เกิดไอเดียขึ้นมาว่า ควรมีจุดหมุนที่ให้ผู้ใช้ยืนอยู่ตรงกลาง แล้วให้กล้องเหวี่ยงวนรอบๆ ใต้เท้าเขาไปเลย
เพื่อพิสูจน์ว่าแนวคิดนี้ใช้ได้ ผมเลยสร้างต้นแบบแรกขึ้นมาก่อน โดยใช้วัสดุที่หาได้ง่ายรอบตัว เช่น ไม้อัดและโลหะเศษๆ ล้อจักรยานเก่า และแท่นพลาสติก จากนั้นก็ติดตั้ง Arduino และอุปกรณ์อิเล็กทรอนิกส์อื่นๆ รวมถึงมอเตอร์กับใบพัดนิ่มๆ คร่าวๆ ลงไป

ต้นแบบนี้พิสูจน์แล้วว่าเราทำเอฟเฟกต์ที่ต้องการได้จริง (ดูได้ในส่วนแรกของวิดีโอด้านล่าง) แต่มันยังไม่ค่อยเสถียรสำหรับผู้ใช้เท่าไหร่ เพราะจุดหมุนจากล้อจักรยานมันแคบเกินไป ผมเลยไปเดินหาที่ร้านรับซื้อของเก่า เพื่อหาล้อที่มีฮับและตลับลูกปืนที่ใหญ่ขึ้น

โปรโตไทป์สุดท้ายกับการลงมือทำจริง (Engineering Implementation)
ตอนแรกพี่เจอเก้าอี้สำนักงานที่เขาทิ้งไว้ ก็หวังว่าจะเอาล้อจักรยานกับระบบแบริ่งจากโปรโตไทป์แรกมาติดตั้งกับฐานและกลไกของเก้าอี้ตัวนี้ซะเลย เพราะมันดูเหมาะจะแก้ปัญหาเรื่องความมั่นคงที่โปรโตไทป์แรกมี แต่มันดันไม่เข้ากันซะงั้น! เลยทำออกมาให้กะทัดรัดแบบที่พี่อยากได้ไม่ค่อยได้

แต่พี่ก็คิดได้ว่า เรายังใช้ฐานแข็งแรงๆ ของเก้าอี้ตัวนี้ได้นี่นา! แค่ต้องทำแบริ่งแบบสั่งตัดพิเศษให้ครอบแกนกลางของฐาน แล้วให้มันหมุนไปพร้อมกับคนใช้งานที่มายืนแทนที่จะนั่งบนเก้าอี้

พี่ก็เลยทำแบริ่งแบบสั่งตัดนั้น แล้วเอามาติดตั้งกับฐานโลหะ จากนั้นก็ทำแขนต่อออกมา เพื่อใช้ติดตั้ง Arduino, มอเตอร์ (บนขาตั้งที่ตัดด้วย Water Jet) และแบตเตอรี่ ส่วน Monopod (ไม้เซลฟี่) ก็เอาไปติดไว้ที่ปลายแขนด้านบน
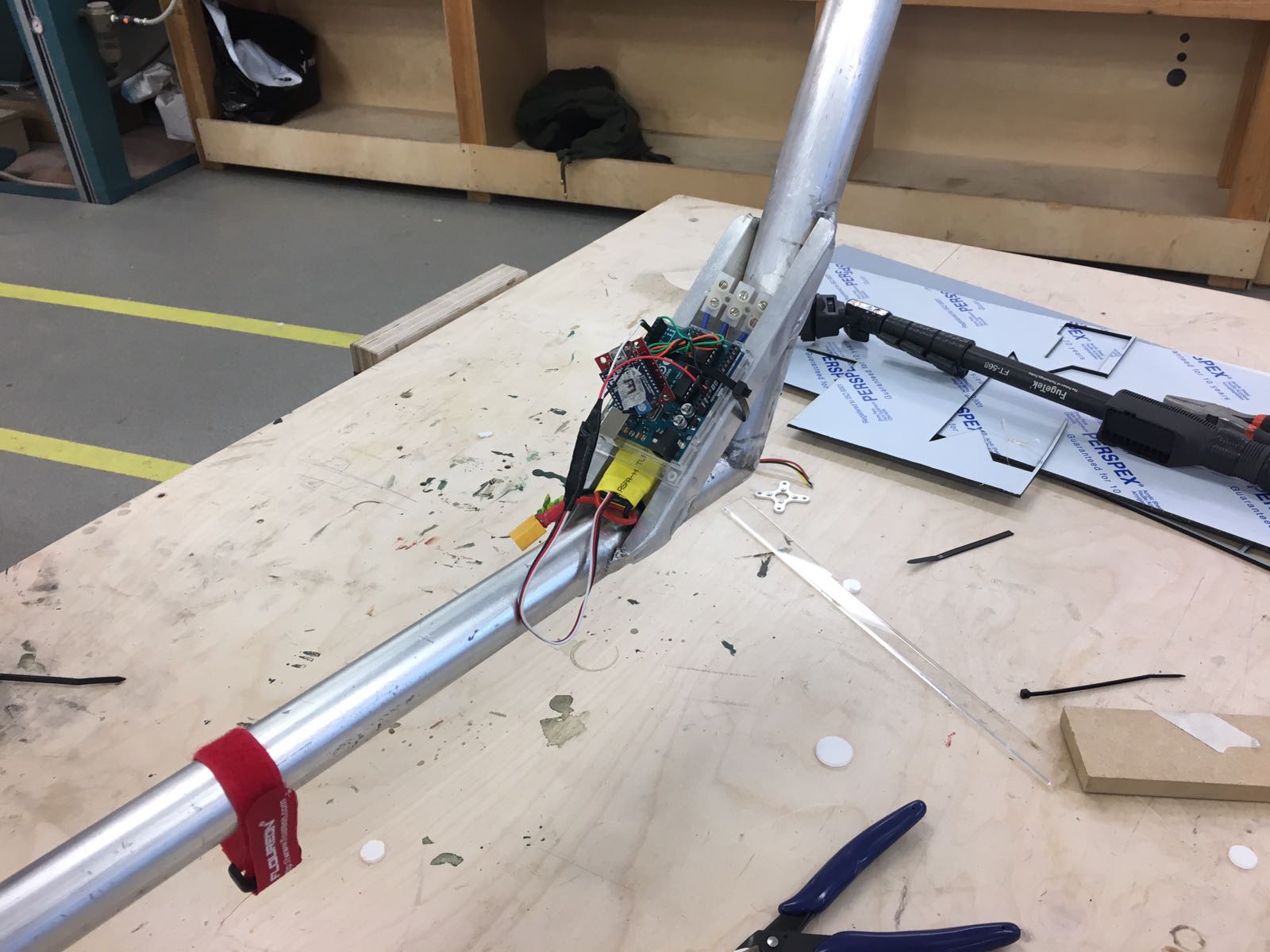

- การจัดการพลังงานกระแสสูง (High-Current Power Management):
- ระบบใช้พลังงานจาก แบตเตอรี่ LiPo 3S (11.1V) ตอนที่มอเตอร์ Brushless เร่งเต็มที่ มันอาจกินกระแสเกิน 15A ได้เลย! พี่เลยใช้ขั้วต่อ XT60 ขนาดใหญ่และสายไฟหนาๆ เพื่อป้องกันปัญหาแรงดันตก (Voltage Sag) ที่อาจทำให้ Arduino รีเซ็ตหรือลิงก์ XBee หลุดได้
- ความปลอดภัยและการควบคุมสมดุล (Safety & Balance Control):
- น้ำหนักของสมาร์ทโฟนกับไม้เซลฟี่สร้างแรงคาน (Cantilever Force) มหาศาลบนแกนกลาง การใช้แขนโลหะที่เชื่อมด้วย TIG ทำให้โครงสร้างทนทานต่อแรงหนีศูนย์กลาง (Centripetal Force) ที่เกิดขึ้นตอนหมุนเร็วๆ ได้ โดยไม่พังทลาย
พี่ใช้ Digi's Xbee Series 2 สำหรับการเชื่อมต่อไร้สาย เพื่อให้ผู้ควบคุมสามารถสั่งความเร็วและตรวจสอบสถานะของชุดกล้องได้เต็มที่ ตอนที่คนใช้งานอยู่ข้างใน พี่ต้องใช้ Arduino ตัวที่สองเพื่อสื่อสารกับตัวที่อยู่บนแขน ซึ่งทำหน้าที่ควบคุมความเร็วและเปิด/ปิด กลายเป็นรีโมทคอนโทรลไปซะเลย
- อินเทอร์เฟซสำหรับผู้ควบคุม (Operator Interface - HMI):
- รีโมทคอนโทรลที่สร้างขึ้นเองนี้ มีกล่องที่ตัดด้วยเลเซอร์และ XBee explorer ในตัว มันให้ "คันเร่ง (Throttle)" ที่แม่นยำสำหรับผู้ควบคุม เพื่อเพิ่มความเร็วของมอเตอร์อย่างนุ่มนวล ป้องกันการ "กระตุก (Jerks)" กะทันหันที่อาจทำให้กล้องหรือตัวแบบหลุดออกได้



สรุปสั้นๆ แต่อัดแน่น
เจ้า Drone-Cycle นี่แหละที่พิสูจน์ให้เห็นว่า "วิศวะข้ามสาย" มันเจ๋งแค่ไหน! เอาเทคโนโลยีขับเคลื่อนจาก UAV มาผสมกับโครงสร้างกลไกหนักๆ และระบบเครือข่ายไร้สายแบบ Mesh งานนี้ได้โซลูชันที่เข้าถึงง่ายแต่พริ้งไม่เบา สำหรับการเล่าเรื่องระดับหนังใหญ่เลยทีเดียว
Kinetic Cinematography: จับเวลาให้หยุดนิ่งด้วยการหมุนของมอเตอร์เบลสเลส
ใครพลาดไป ตามมาดูเร็ว!
ผลงานสุดท้ายจากกล้องบนตัว Rig ทั้งหมดที่พี่ทำไว้ในช่อง YouTube อยู่ตรงนี้แล้วจ้า:
เด็ดกว่านั้น! ดู Rig ตัวนี้เล่นกับฟองสบู่สิ!
ขอบคุณที่ตามอ่านและดูโปรเจกต์ Arduino ชิ้นแรกของพี่จนจบนะ!
ถ้าอยากติดตามผลงานอื่นๆ ของพี่ต่อ ก็ตามมาได้ที่ช่องทางเหล่านี้เลย