Eco-Conscious Robotics: The EscoriaBot Journey
EscoriaBot เป็นมากกว่าแค่รถถังควบคุมระยะไกล; มันคือแถลงการณ์สำหรับวิศวกรรมที่ยั่งยืน โครงการนี้ถือกำเนิดจากความฝันในวัยเด็กที่ได้รับแรงบันดาลใจจาก R2-D2 และถูกทำให้เป็นจริงผ่านปรัชญาของอุปกรณ์อิเล็กทรอนิกส์รีไซเคิล ซึ่งแสดงให้เห็นว่าวัสดุ "เหลือใช้" สามารถเปลี่ยนเป็นแพลตฟอร์มหุ่นยนต์ขับเคลื่อนด้วยสายพานประสิทธิภาพสูงได้อย่างไร
Sustainable Engineering: Discard to Dashboard
แก่นหลักของ EscoriaBot สร้างขึ้นบนหลักการของ "Circular Robotics" แทนที่จะซื้อโครงสร้างตัวถังและชุดมอเตอร์สำเร็จรูปที่มีราคาแพง โครงการนี้ใช้ประโยชน์จากส่วนประกอบที่นำมาจากเทคโนโลยีสำนักงานและของใช้ในบ้านที่ถูกทิ้ง:
- Recycled Motive Power: มอเตอร์และกระปุกเกียร์เครื่องพิมพ์ที่กู้คืนจากอุปกรณ์ "vampire" (อุปกรณ์ที่กินไฟแม้ไม่ได้ใช้งาน) ให้แรงบิดสูงที่จำเป็นสำหรับรถถังขนาด 60cm
- Upcycled Structural Materials: โครงสร้างตัวถังทำจากโฟมพลาสติกโปสเตอร์ที่มีความหนาแน่นสูง ซึ่งเป็นวัสดุที่ทนทานและตัดง่าย มักพบในป้ายโฆษณาที่ถูกทิ้ง
- Salvaged Electronics: ส่วนประกอบแบบพาสซีฟ เช่น LEDs, capacitors และ resistors ถูกถอดออกจากอุปกรณ์ที่ชำรุด ช่วยลดผลกระทบต่อสิ่งแวดล้อมของโครงการ
Advanced Mechanical Design: The Sherman-Style Bogie System
เพื่อเอาชนะภูมิประเทศที่ขรุขระซึ่งชุดงานอดิเรกมาตรฐานส่วนใหญ่ไปไม่รอด EscoriaBot ใช้ระบบกันสะเทือนแบบ Bogie Suspension system ที่ซับซ้อนซึ่งได้รับแรงบันดาลใจจากรถถัง Sherman ในตำนาน
- Terrain Adaptation: ล้อถูกติดตั้งเป็นคู่ซึ่งมีการแกว่งตัว ทำให้สายพานสามารถรักษาสัมผัสกับพื้นผิวที่ไม่เรียบได้อย่างเต็มที่
- Recycled Axles: ก้านไฟเบอร์กลาสจากเต็นท์ที่ชำรุดถูกนำมาใช้ใหม่เป็นเพลาที่มีน้ำหนักเบาและมีความทนทานสูงสำหรับระบบล้อ
- Fabric-Core Tracks: สายพานตีนตะขาบสร้างจากแผ่นพลาสติกที่ติดกาวเข้ากับแถบผ้าหนาพิเศษ ทำให้มีความยืดหยุ่นในขณะที่ยังคงรักษาระยะพิตช์ที่จำเป็นสำหรับเฟืองขับเคลื่อน
Command and Control: Arduino Mega Power
ในระดับฮาร์ดแวร์ EscoriaBot ต้องการ I/O และหน่วยความจำที่กว้างขวางของ Arduino Mega 2560 เพื่อจัดการงานนำทางที่ซับซ้อน
- Motor Drive: L298N Dual H-Bridge จัดการความต้องการกระแสไฟสูงของมอเตอร์รีไซเคิล ช่วยให้สามารถเคลื่อนที่ไปข้างหน้า ถอยหลัง และควบคุมทิศทางแบบ skid-steering ได้อย่างแม่นยำ
- Bluetooth Link: HC-05 module ให้การควบคุมไร้สายระยะไกล ทำให้ผู้ใช้สามารถควบคุมหุ่นยนต์ขนาด 60cm ตัวยักษ์นี้ผ่านสมาร์ทโฟนหรือเครื่องส่งสัญญาณ Bluetooth แบบกำหนดเอง
- Memory for Expansion: หน่วยความจำแฟลชขนาดใหญ่ของ Mega ช่วยให้สามารถอัปเกรดในอนาคตได้ เช่น การหลีกเลี่ยงสิ่งกีดขวางอัตโนมัติโดยใช้ ultrasonic sensors หรือการนำทางด้วย GPS
ตั้งแต่ผมได้เห็น R2-D2 เมื่อกว่า 40 ปีที่แล้วในวัยเด็ก ผมก็อยากมีหุ่นยนต์เป็นของตัวเอง
แต่มีอุปสรรคใหญ่ขวางกั้นระหว่างผมกับความฝัน นั่นคือเรื่องของ Electronics และปัญหานี้ก็คงอยู่มาอีกหลายปี
ในฐานะผู้ใช้งานและผู้สนับสนุน free software ผมเคยได้ยินเรื่อง Arduino มาบ้าง แต่ดูเหมือนจะยากเกินไปสำหรับผม จนกระทั่งเพื่อนของผม Gustavo ช่วยผมเลือกชุดอุปกรณ์ชุดแรก
ผมประกอบมันเข้าด้วยกันแล้วก็ทำต่อไปเรื่อยๆ
ผมไม่ชอบโครงสร้างตัวถังเดิมเพราะมันติดขัดกับอุปสรรคทุกอย่าง ผมจึงตัดสินใจทำโครงสร้างตัวถังของตัวเอง และมันก็ใช้ได้ผล แต่ผมต้องการอะไรที่ทรงพลังกว่านั้น
ผมจึงเริ่มมองหาทางเลือกอื่นและทำการค้นคว้า ผมพบช่อง YouTube หลายช่อง เช่น The Post Apocalyptic Inventor หรือ Espacio de César ซึ่งทำให้ผมตระหนักว่าผมสามารถใช้ประโยชน์จากอุปกรณ์ที่ถูกทิ้งจำนวนมาก และยังช่วยให้โลกสะอาดขึ้นได้อีกด้วย
ผมเริ่มมองหาอุปกรณ์ทุกประเภทที่ผมสามารถนำชิ้นส่วนมาใช้ได้
ผมเริ่มรีไซเคิลมอเตอร์เครื่องพิมพ์ และขณะที่ผมกำลังเรียนรู้ ผมก็ได้กู้คืนชิ้นส่วนต่างๆ มากขึ้นเรื่อยๆ
ทุกวันนี้ ผมถอดแยกชิ้นส่วนอุปกรณ์ทุกประเภทและใช้ประโยชน์จากชิ้นส่วนอื่นๆ อีกมากมาย เช่น gears, gearboxes, LEDs, capacitors, resistors เป็นต้น
สุดท้ายผมก็ได้สร้างหุ่นยนต์สองเวอร์ชัน: หุ่นยนต์ตีนตะขาบยาว 60 cm x กว้าง 37 cm ชื่อ EscoriaBot และอีกตัวหนึ่งที่เล็กกว่าคือขนาด 36 cm x 25 cm ชื่อ BotSura
มันทำมาจากพลาสติกโปสเตอร์รีไซเคิล ผมไม่รู้ว่าเป็นพลาสติกชนิดไหน แต่ดูเหมือนเป็นโฟมที่มีความหนาแน่นสูง อย่างไรก็ตาม มันสามารถทำจากวัสดุเรียบๆ หรือพลาสติกรีไซเคิลชนิดใดก็ได้
แบบแปลนของหุ่นยนต์ แบบแปลนถูกสร้างใน Inkscape ตามสเกลของหุ่นยนต์จริง แต่สามารถปรับขนาดได้ง่าย
https://drive.google.com/file/d/1gIeu_Nfqf8OKlPs3iF4hUQFp0k1Tc_Qh/view?usp=sharing
คลังเก็บข้อมูล (repository)
https://github.com/EstebanJPagano/EscoriaBot
เรื่องราวในภาษาสเปน
ขั้นที่ 1: โครงสร้างตัวถัง

โครงสร้างตัวถังมีขนาดใหญ่เพื่อรองรับการติดตั้งอุปกรณ์ต่างๆ ไว้ด้านบน
มันเป็นรูปทรงกล่องที่มีส่วนปลายทำมุม ซึ่งช่วยให้เอาชนะอุปสรรคได้
เป็นความคิดที่ดีที่จะเจาะรูก่อนตัด หากได้ตัดสินใจออกแบบมาอย่างดีแล้ว
ขั้นที่ 2: ล้อ

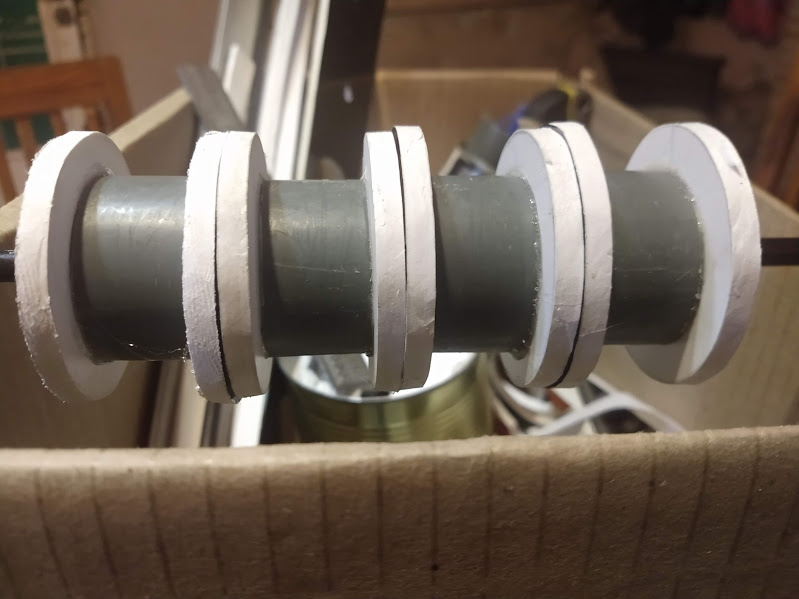
ล้อทำจากวงกลมสองชิ้นที่เชื่อมต่อกันด้วยท่อที่มีเส้นผ่านศูนย์กลางเล็กกว่าอยู่ตรงกลาง และยึดติดกันด้วย silicone
ในกรณีของผม ทุกอย่างถูกตัดด้วย cutter และเจาะรู ดังนั้นจึงไม่ได้แม่นยำมากนัก ผมยังตระหนักด้วยว่ามันไม่จำเป็นต้องสมบูรณ์แบบก็สามารถทำงานได้ดี
เพื่อให้แน่ใจว่ามันตรง ผมได้นำไปใส่บนก้านไฟเบอร์กลาสรีไซเคิลจากเต็นท์ที่ชำรุดแล้วหมุนมัน เนื่องจาก silicone สามารถปรับแก้ไขได้ ผมจึงใช้มันเพื่อให้แน่ใจว่ามันหมุนได้อย่างสมบูรณ์แบบที่สุดเท่าที่จะทำได้
ขั้นที่ 3: ระบบ Bogie
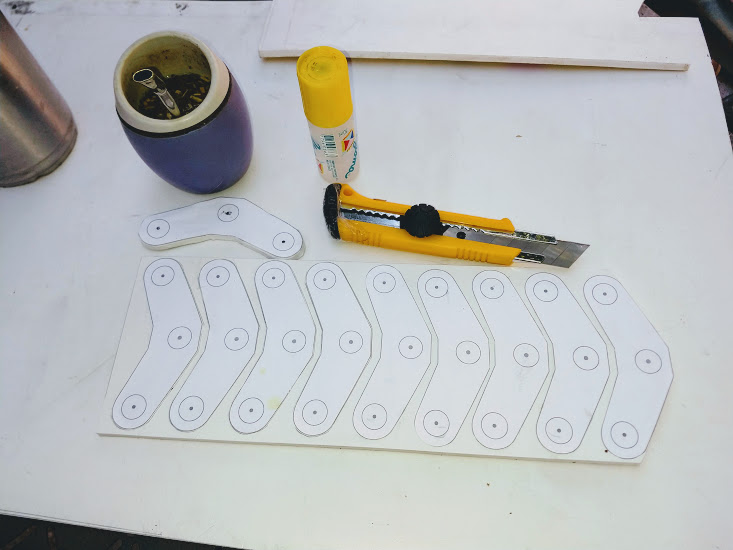
จากนั้นออกแบบ bogies โดยอิงจากดีไซน์ของรถถัง Sherman ซึ่งช่วยให้ล้อสามารถปรับตัวเข้ากับภูมิประเทศและเอาชนะอุปสรรคได้ดีขึ้น
สำหรับขั้นตอนนี้ ผมพิมพ์ลายแบบที่ปรากฏในแบบแปลน จากนั้นจึงตัดและแปะลงบนพลาสติกเพื่อทำการตัด
แน่นอนว่าทั้งหมดนี้หากมีเครื่อง CNC จะง่ายกว่ามาก แต่ผมยังไม่มี (ในตอนนี้) และผมก็ยังคงชอบทำอะไรด้วยมือ
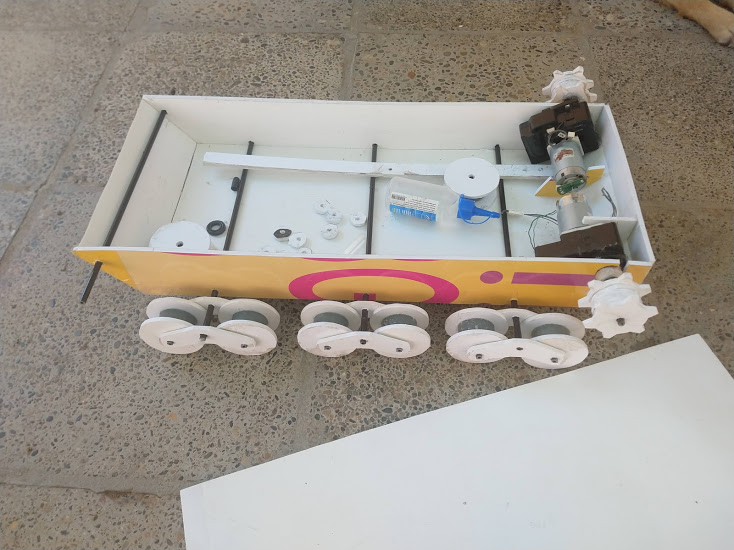
จากนั้นผมประกอบ bogies โดยใช้ก้านไฟเบอร์กลาสเป็นเพลา
เพื่อจัดแนวล้อ ผมตัดสินใจร้อยก้านไฟเบอร์กลาสผ่านโครงสร้างตัวถังทั้งหมด เพื่อให้แน่ใจว่าทุกอย่างอยู่ในแนวเดียวกัน และยังเพิ่มความแข็งแรงให้กับโครงสร้างตัวถังด้วย
ขั้นที่ 4: ล้อขับเคลื่อน

ตอนนี้มาถึงส่วนที่ซับซ้อน
ในอดีตผมเคยทำสายพานที่ล้อขับเคลื่อนทำงานโดยการเสียดสีกับสายพาน แต่นี่ไม่ใช่วิธีการทำงานของยานพาหนะแบบสายพาน และก็ไม่ใช่ทางที่ดีที่สุดด้วย เพราะมันสูญเสียกำลังจากการเสียดสี และมักจะหมุนฟรีบ่อยครั้ง
ดังนั้นจึงออกแบบสายพานที่เรียบง่ายกว่าของรถถัง และยังทำด้วยมือได้ง่าย ทำจากแผ่นพลาสติกที่ขัดกับ gears
ขั้นที่ 5: สายพานตีนตะขาบ

เมื่อ