โปรเจกต์นี้เล่นเพลง "What Does the Fox Say" ของ Ylvis https://www.youtube.com/watch?v=jofNR_WkoCE&list=RDjofNR_WkoCE&start_radio=1 .
มันเล่นเพลงนี้บน piezo buzzer และยังกระดิกหางของสุนัขจิ้งจอกไปพร้อมกัน คุณสามารถดูวิดีโอสาธิตได้ที่นี่:
นี่เป็นโปรเจกต์ที่ง่ายมาก โดยเฉพาะอย่างยิ่งหากคุณเคยใช้งาน Arduino มาก่อน
อันดับแรก คุณจะต้องพิมพ์ไฟล์ Fox Bot Base และไฟล์ Fox Bot Tail จากนั้นคุณก็ประกอบ servo และ Arduino เข้ากับฐาน และประกอบหางเข้ากับ servo horn ผมใช้กาวร้อนในการประกอบส่วนนี้
จากนั้นคุณก็อัปโหลดโค้ดไปยัง Arduino โดยใช้ Arduino IDE หากคุณไม่เคยทำมาก่อน โปรดศึกษาเอกสารประกอบ ผมใช้ไลบรารีชื่อ buzzer.h ซึ่งคุณอาจต้องติดตั้ง
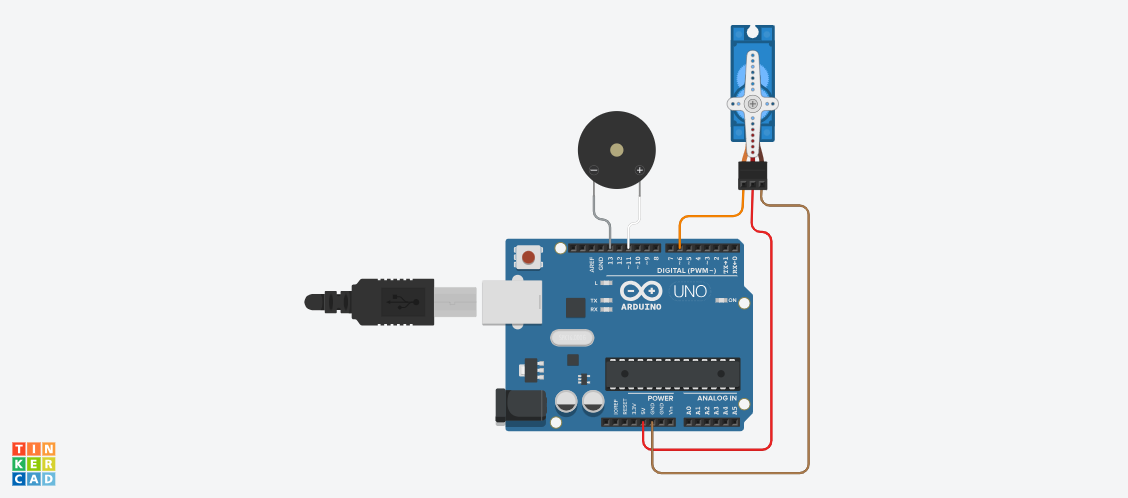
สุดท้าย คุณก็ทำการเชื่อมต่อสายไฟของส่วนประกอบต่างๆ เข้ากับ Arduino ตราบใดที่คุณใช้ 9g servo สายสีแดงจะเชื่อมต่อกับ 5V, สายสีดำเชื่อมต่อกับ GND และสายสีส้มเชื่อมต่อกับ digital pin 6 ด้านหนึ่งของ piezo buzzer เชื่อมต่อกับ digital pin 11 ส่วนอีกด้านหนึ่งเชื่อมต่อกับ digital pin 13 ผมติด piezo buzzer เข้ากับ Arduino โดยตรง ตามที่คุณเห็นในวิดีโอสาธิต piezo buzzer ส่วนใหญ่ไม่ไวต่อขั้ว + หรือ - แม้ว่าจะมีระบุไว้ก็ตาม
คุณสามารถดูไฟล์ TinkerCAD ได้ที่ลิงก์ด้านล่าง หากคุณต้องการแก้ไขสิ่งใด
https://www.tinkercad.com/things/iIbzoGm5Iwq
คุณยังสามารถดูได้ว่าผมสร้าง array ของโน้ตที่คุณเห็นในโค้ดได้อย่างไร ผมใช้ Google Sheets และโน้ตเพลงที่พบได้ที่นี่:
https://musescore.com/user/1320626/scores/6686202
https://docs.google.com/spreadsheets/d/1Hj5AEMUKdZPH4zJ71bwgdxuM_eDKzBiqrZQkhEObgv4/edit?usp=sharing
รายละเอียดทางเทคนิคเพิ่มเติม
หุ่นยนต์สำรวจอัตโนมัติ
Fox Bot เป็นยานพาหนะอัตโนมัติ 4 ล้อที่ทนทาน ออกแบบมาสำหรับการสำรวจและการหลีกเลี่ยงสิ่งกีดขวางในสภาพแวดล้อมภายในอาคารที่หลากหลาย
- การสแกนนำทางแบบตอบสนอง: มาพร้อมกับ ultrasonic sensor แบบ "ติดหัว" บน micro servo. Arduino จะทำการสแกน 180 องศาทุกครั้งที่ตรวจพบสิ่งกีดขวาง เพื่อคำนวณ "เส้นทางที่มีแรงต้านน้อยที่สุด" ก่อนที่จะทำการบังคับเลี้ยว
- ชุดขับเคลื่อนแบบ Dual-Bridge: ควบคุมผ่าน L298N motor driver. เฟิร์มแวร์จะจัดการการเลี้ยวแบบ differential steering ทำให้สามารถเลี้ยวแบบ zero-radius ได้ในพื้นที่แคบ
ตรรกะภารกิจ
- โหมดการลักลอบและโหมดความเร็ว: มีโหมดซอฟต์แวร์สำหรับปรับความเร็วมอเตอร์เพื่อการสำรวจแบบ "เงียบ" หรือการขนส่งแบบ "ความเร็วสูง" ซึ่งเป็นแพลตฟอร์มที่ยืดหยุ่นสำหรับหุ่นยนต์เพื่อการศึกษา