GESTURE BOT
Gesture Bot เป็นหุ่นยนต์มือขนาดเท่าของจริงที่เรียบง่ายแต่สามารถเลียนแบบท่าทางมือได้ สามารถตั้งโปรแกรมเองเพื่อแสดงท่าทางมือบางอย่างได้
กลไกของมือขับเคลื่อนด้วย Servo 10 ตัวที่ใช้สำหรับจุดหมุนของนิ้ว และ Stepper Motor สองตัวที่ควบคุมการเคลื่อนไหวของข้อมือและการเคลื่อนไหวของฐานแขน หัวใจหลักของกล่องคือ Arduino Mega ซึ่งควบคุมอุปกรณ์อิเล็กทรอนิกส์ทั้งหมด
ในตอนนี้ ผมกำลังใช้คำสั่ง serial เพื่อควบคุมหุ่นยนต์มือ แม้ว่าจะมีคุณสมบัติอื่น ๆ อีกมากมายที่สามารถนำมาใช้ได้ เช่น การออกแบบแผงควบคุมที่ส่งข้อมูลป้อนกลับ ซึ่งสามารถทำได้ง่ายด้วย analog pin จำนวนมากของ Arduino Mega
แม้ว่าฟังก์ชันทั้งหมดของมือจะทำงานได้ดี แต่ผมเชื่อว่าการออกแบบยังมีข้อเสียด้านความสวยงาม และหากสามารถเพิ่มองศาอิสระในการเคลื่อนไหวของจุดหมุนได้ ก็จะทำงานได้เหมือนมือจริงมากขึ้นอย่างแน่นอน
การประกอบ
ผมได้แบ่งการประกอบออกเป็นสี่ส่วนหลักเพื่อให้ง่ายต่อการอธิบาย ได้แก่ ฐาน (The Base), แขน (The Arm), มือ (The Hand) และกล่องควบคุม (The Control Box)


ฐาน (THE BASE)
การประกอบฐานประกอบด้วยโครงสร้างส่วนบนและส่วนล่าง โครงสร้างส่วนบนเป็นที่อยู่ของ Stepper Motor ที่ใช้ขยับแขน โครงสร้างส่วนบนเชื่อมต่อกับโครงสร้างส่วนล่างด้วยแผ่นโลหะที่ยึดติดกันด้วยน็อต ชุด LED รูปสี่เหลี่ยม 12V ถูกยึดไว้ใต้แขนบนโครงสร้างส่วนบน โครงสร้างส่วนล่างมีพื้นที่ผิวเพียงพอสำหรับกระจายน้ำหนักของมือทั้งส่วน
แถบ LED 12V อีกชุดหนึ่งติดตั้งอยู่รอบเส้นรอบวงของโครงสร้างส่วนล่าง Base Stepper Motor เชื่อมต่อกับแขนด้วย coupling flange และแขนถูกยึดให้อยู่กับที่ด้วย bearing ที่ติดตั้งจากอีกด้านหนึ่ง bearing housing ยึดติดกับโครงสร้างส่วนบนของชุดฐานด้วยน็อต
สุดท้าย ปุ่มกดถูกยึดไว้กับโครงสร้างส่วนบนเพื่อทำหน้าที่เป็น kill switch เพื่อป้องกันการเคลื่อนไหวเพิ่มเติมและจากนั้นจะเคลื่อนที่ย้อนกลับไปจำนวนหนึ่ง Step เพื่อให้มืออยู่ในตำแหน่งที่แน่นอน ทางเลือกที่ดีกว่าคือการต่อ POT เข้ากับแกนของ Base Stepper Motor เพื่อรับข้อมูลป้อนกลับของตำแหน่งปัจจุบันของ Stepper Motor แต่ตอนนี้ผมปล่อยไว้แบบเดิมก่อน
แขน (THE ARM)
แขนถูกพิมพ์ 3D เป็นชิ้นเดียวและมีช่องด้านบนสำหรับใส่ wrist Stepper Motor แขนถูกวางในตำแหน่งโดยได้รับการสนับสนุนจาก bearing และ coupling flange ที่เชื่อมต่อแกนของ Base Stepper Motor เข้ากับแขน
หลังจากติดตั้ง wrist Stepper Motor เข้ากับแขนแล้ว ก็ปิดด้วยฝาครอบ และแกนของ wrist Stepper Motor พร้อม coupling flange จะถูกซ่อนไว้ด้วยปลอกคอที่ยึดติดอยู่ใต้ชุดมือ
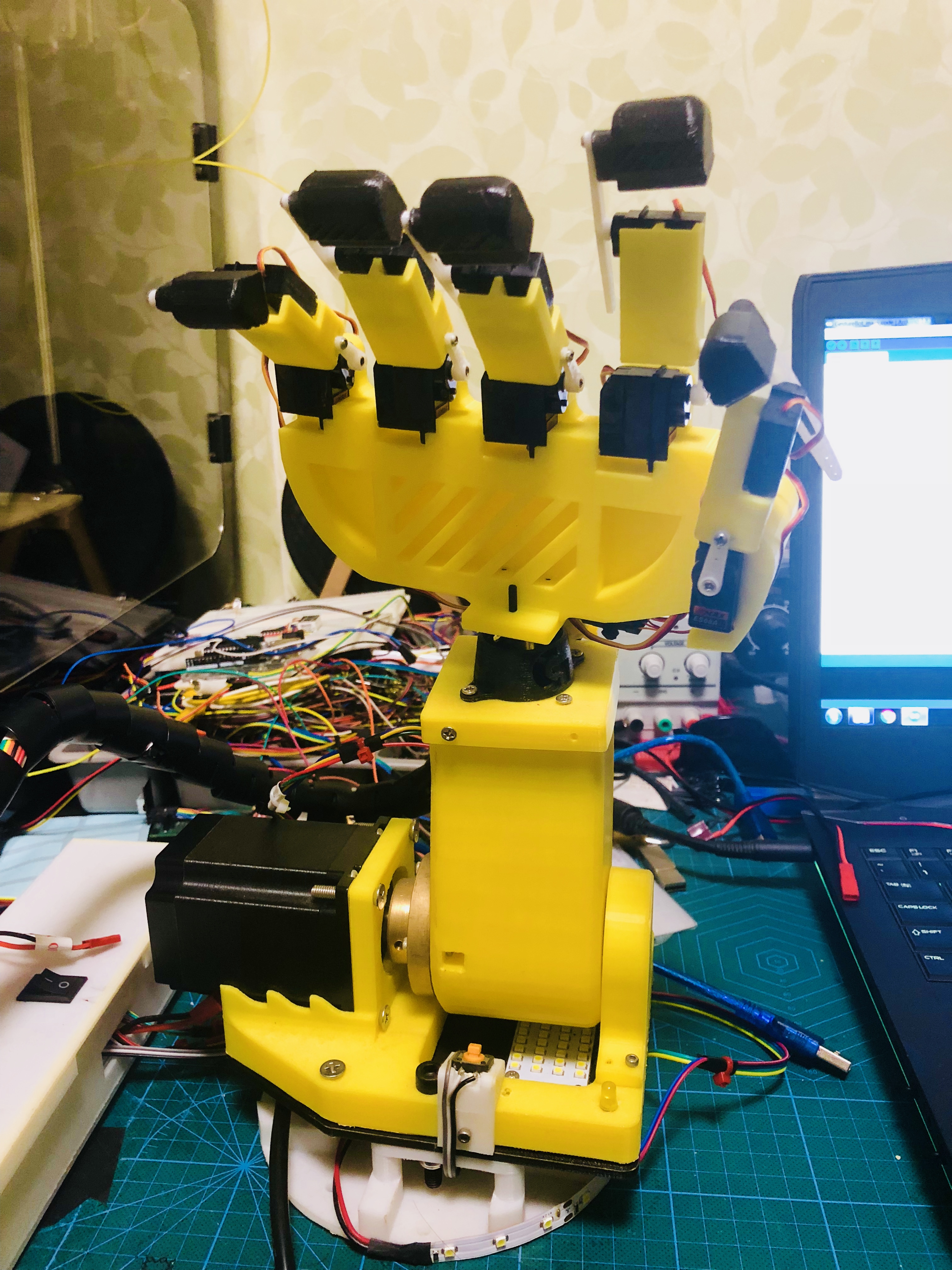
มือ (THE HAND)
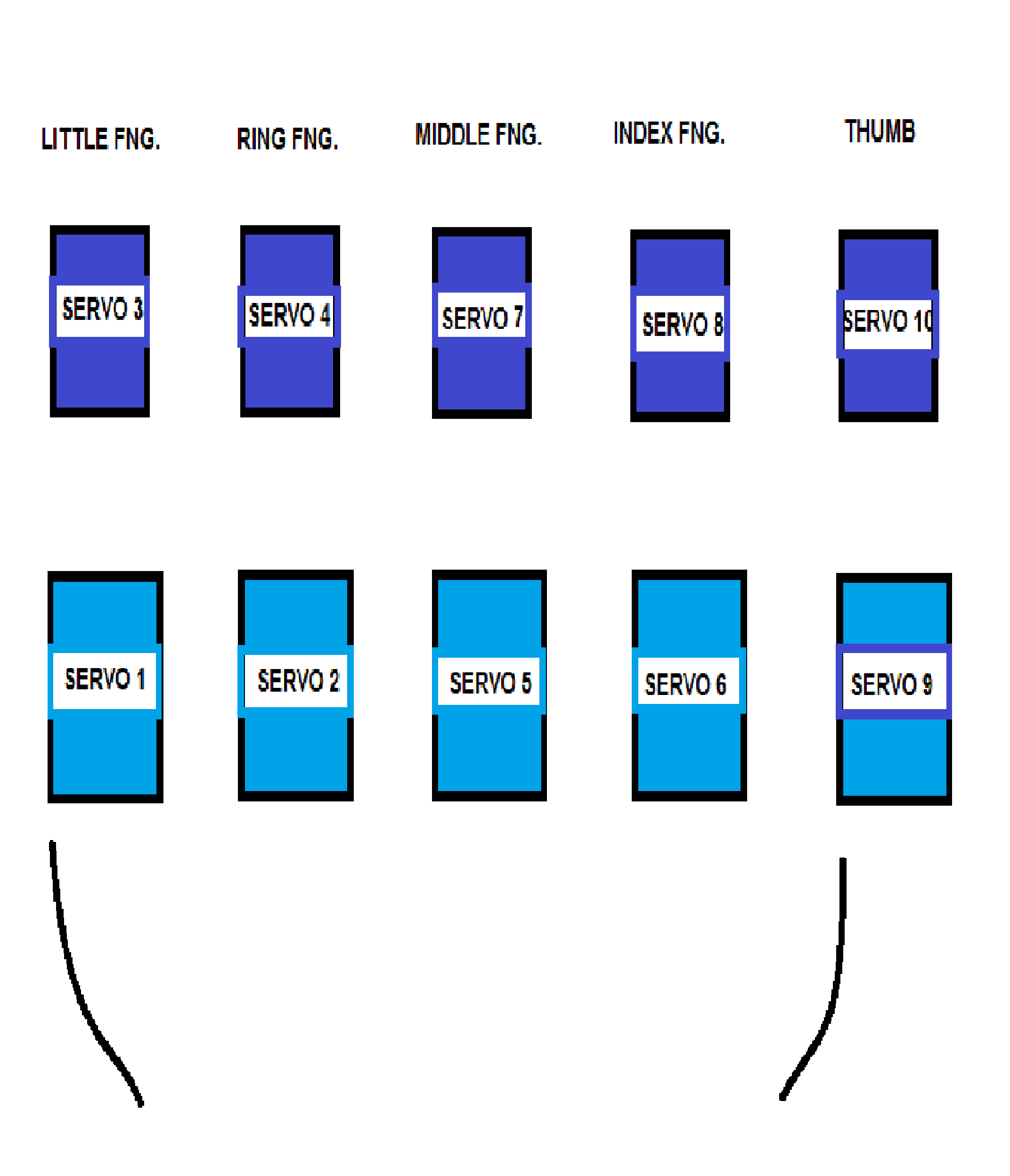
ชุดมือประกอบด้วยโครงสร้างฐานมือและชุดนิ้ว โครงสร้างฐานมือเป็นที่อยู่ของ Servo ด้านล่างห้าตัว (17g) ซึ่งเป็นจุดหมุนสำหรับข้อต่อนิ้วส่วนล่าง ชุดนิ้วส่วนใหญ่มีโครงสร้างขนาดเล็กที่รองรับ Servo ด้านบน (4.1g) ซึ่งเป็นจุดหมุนส่วนบนของนิ้ว
สาย Servo ของ Servo ได้รับการยึดติดด้วยกาวโดยมีการหย่อนเล็กน้อยเพื่ออำนวยความสะดวกในการเคลื่อนไหวของโครงสร้างมือขนาดเล็ก ข้อต่อนิ้วทำมาจากแขนกลขนาดเล็กที่มาพร้อมกับ Servo Motor
กล่องควบคุม (THE CONTROL BOX)
กล่องควบคุมเป็นที่อยู่ของ TB6600 Stepper Motor Driver สองตัว, breadboard สำหรับการเชื่อมต่อ, breadboard power supply และบอร์ดไมโครคอนโทรลเลอร์ Arduino Mega ซึ่งควบคุมการเคลื่อนไหวทั้งหมดของหุ่นยนต์มือ ผมรู้ว่า TB6600 นั้นเกินความจำเป็นไปหน่อยสำหรับ NEMA 17 Stepper Motor แต่ผมมีอันหนึ่งเหลืออยู่และมันก็พอดีกับกล่องควบคุม ผมจึงตัดสินใจเลือกใช้มัน ผมคิดว่ากล่องควบคุมสามารถทำให้มีขนาดเล็กลงได้โดยการเปลี่ยน TB6600 หนึ่งตัวเป็น A4988 Driver
สวิตช์เปิด/ปิดสามตัวที่ด้านบนของกล่องควบคุมจะสลับแบตเตอรี่ 14.8V, 12V และ 7.4V ตามลำดับ ผมทำเช่นนี้ส่วนใหญ่เป็นเพราะง่ายต่อการทดสอบส่วนต่าง ๆ ของมือโดยการตัดไฟออกจากส่วนที่ไม่เกี่ยวข้องกับการทดสอบ และผมคิดว่านี่จะเป็นข้อควรระวังที่ดีเมื่อใช้งานกับแหล่งจ่ายไฟ DC แรงสูง
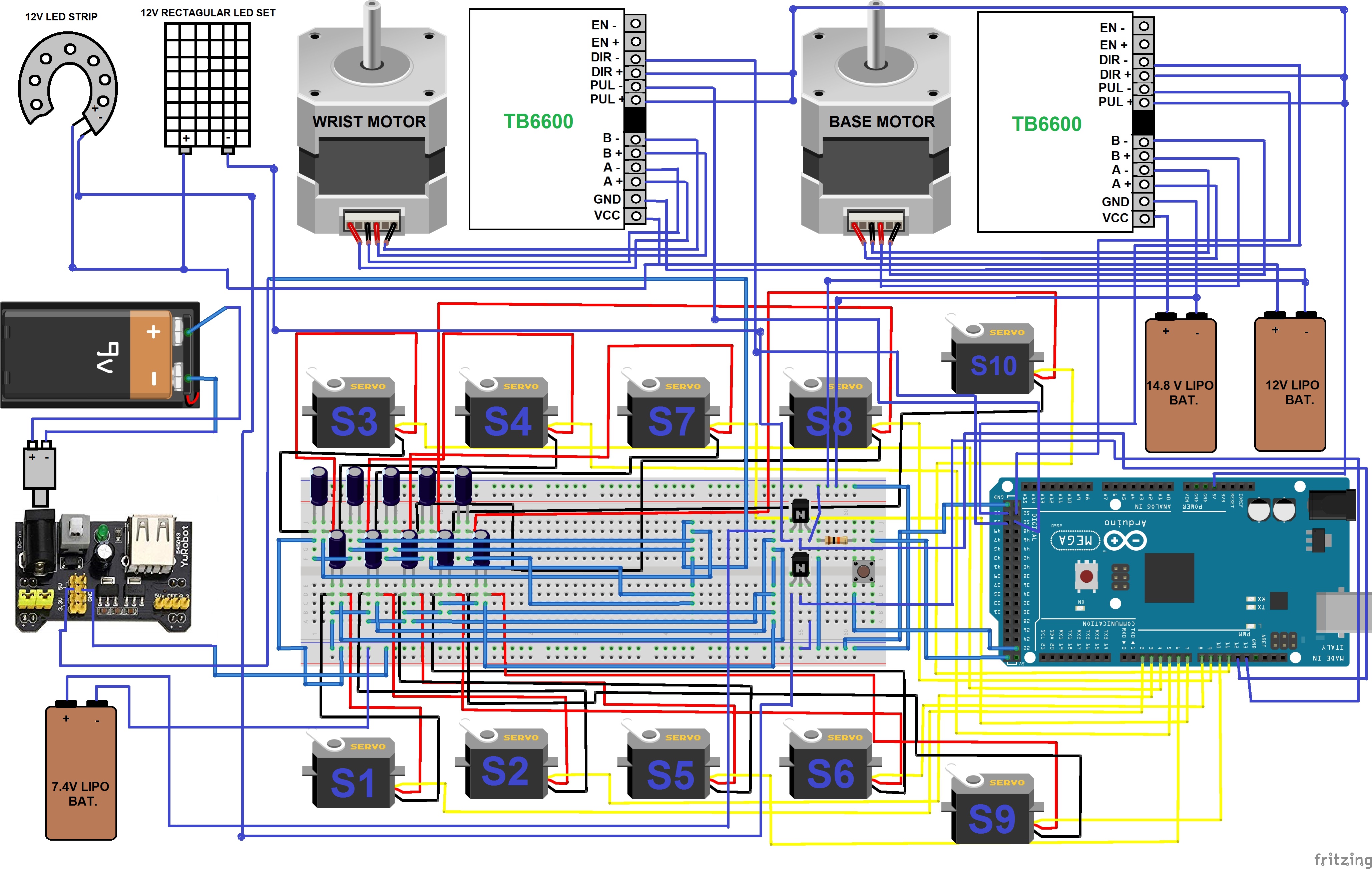
การจัดการพลังงาน
- แบตเตอรี่ LIPO/4S/2600mAh 14.8V - จ่ายไฟให้กับ Base Stepper Motor
- แบตเตอรี่ LIPO/3S/2200mAh 12V - จ่ายไฟให้กับ Wrist Stepper Motor, ชุด LED สี่เหลี่ยม และแถบ LED
- แบตเตอรี่ LIPO/2S/800mAh 7.4V - จ่ายไฟให้กับ Servo ฐานห้าตัว (17g) ในชุดมือ
- แบตเตอรี่ 9V ทั่วไป - จ่ายไฟให้กับ Arduino Mega และ Servo ด้านบนห้าตัว (4.1g) ในชุดมือ
การพัฒนาที่เป็นไปได้ในอนาคต
- Gesture Bot สามารถควบคุมด้วย bluetooth หรือ wifi ผ่าน APP ได้ นอกจากนี้ ยังสามารถออกแบบอุปกรณ์ควบคุมระยะไกลแบบกำหนดเองเพื่อควบคุมด้วย analog pin จำนวนมากที่ยังไม่ได้ใช้งาน
- ในด้านการออกแบบ ผมเชื่อว่ายังมีช่องว่างสำหรับการปรับปรุงอีกมาก แม้ว่าอาจมีอุปสรรคในการค้นหาฮาร์ดแวร์ที่เหมาะสมกับหุ่นยนต์มือที่ดูเพรียวบางและปราดเปรียว ผมยินดีรับฟังความคิดเห็นจากชุมชนในเรื่องนี้ และยินดีกับการเปลี่ยนแปลงใด ๆ ที่คุณทำ
สัญญาณโต้ตอบ
- Visual Gaze Feedback: ดวงตาของหุ่นยนต์ (LED) จะเปลี่ยนสีตามท่าทางที่ตรวจจับได้ในปัจจุบัน เพื่อยืนยันการโต้ตอบระหว่างมนุษย์กับหุ่นยนต์ได้ทันที