
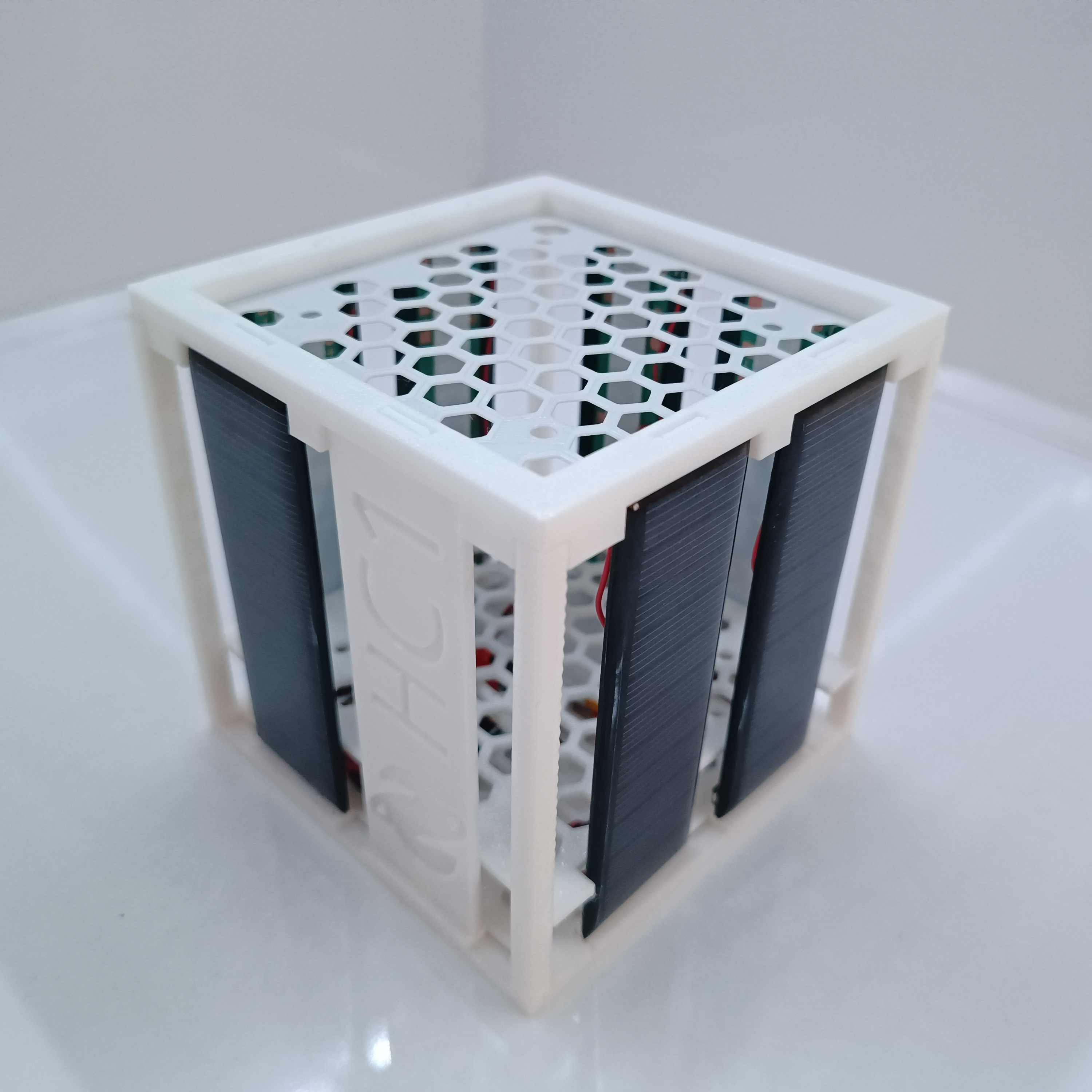
HC1 Mission Overview (สรุปภารกิจ HC1)
ชื่อภารกิจ: HC1
วันปล่อยจรวด: ยังไม่กำหนด (รอประกาศอีกทีนะน้อง)
เป้าหมายหลักของภารกิจ (Mission Objective): เป้าหมายหลักของภารกิจ HC1 คือการเก็บรวบรวมและวิเคราะห์ข้อมูลอย่างละเอียดเกี่ยวกับการเคลื่อนที่และการวางตัว (orientation) ของดาวเทียมในอวกาศ ข้อมูลนี้จะเป็นกุญแจสำคัญในการพัฒนาเทคโนโลยีและระบบดาวเทียมขั้นสูงสำหรับภารกิจในอนาคตที่จะมี payload ที่ซับซ้อนขึ้นอีกเยอะเลย
จุดประสงค์ของภารกิจ (Mission Purpose): ดาวเทียม HC1 ออกแบบมาให้เป็นเหมือนสนามทดสอบ (testbed) สำหรับเซ็นเซอร์ตรวจจับการเคลื่อนไหวและการวางตัวหลายๆ ชนิด โดยการเก็บข้อมูลความแม่นยำสูงเกี่ยวกับพฤติกรรมของดาวเทียมในวงโคจร ภารกิจนี้มีเป้าหมายเพื่อเพิ่มความเข้าใจของเราเกี่ยวกับพลวัตของดาวเทียม (satellite dynamics) ข้อมูลนี้จะเป็นเครื่องมือสำคัญในการออกแบบดาวเทียมที่ซับซ้อนและฉลาดขึ้น เพื่อเป้าหมายทางวิทยาศาสตร์ การสื่อสาร หรือการสังเกตการณ์เฉพาะด้านในอนาคต
เป้าหมายสำคัญ (Key Goals):
1. การเก็บข้อมูล (Data Collection):
○ รวบรวมข้อมูลรายละเอียดเกี่ยวกับความเร่งเชิงเส้น (linear acceleration), ความเร็วเชิงมุม (angular velocity), และการวางตัวตามสนามแม่เหล็ก (magnetic orientation) ของดาวเทียม
○ ใช้ข้อมูลนี้เพื่อทำความเข้าใจว่าดาวเทียมเคลื่อนที่และทรงตัวในอวกาศได้ยังไง
2. การทดสอบเซ็นเซอร์ (Sensor Testing):
○ ประเมินประสิทธิภาพและความน่าเชื่อถือของเซ็นเซอร์ตรวจจับการเคลื่อนไหวและการวางตัวชนิดต่างๆ ภายใต้สภาพแวดล้อมอวกาศจริง
○ หาชุดเซ็นเซอร์ที่ดีที่สุดสำหรับภารกิจในอนาคต
3. การตรวจสอบระบบ (System Validation):
○ ทดสอบการทำงานร่วมกันและประสิทธิภาพของระบบต่างๆ บนดาวเทียม รวมถึงระบบจัดการพลังงาน (power management), ระบบสื่อสาร (communication), และหน่วยประมวลผลข้อมูล (data processing units)
○ ให้แน่ใจว่าระบบทั้งหมดทำงานประสานกันอย่างราบรื่นเพื่อสนับสนุนความต้องการในการปฏิบัติงานของดาวเทียม
4. รากฐานสำหรับภารกิจหน้า (Foundation for Future Missions):
○ ใช้ข้อมูลและความรู้ที่ได้จากภารกิจ HC1 เพื่อเป็นแนวทางในการออกแบบและพัฒนาดาวเทียมรุ่นต่อไป
○ วางแผนและดำเนินภารกิจขั้นสูงที่มีแอปพลิเคชันทางวิทยาศาสตร์หรือการใช้งานจริงที่เฉพาะเจาะจงมากขึ้น โดยอ้างอิงจากสิ่งที่ค้นพบใน HC1
ความสำคัญของภารกิจ (Mission Significance): ภารกิจ HC1 เป็นก้าวที่สำคัญมากในการพัฒนาดาวเทียมอย่างต่อเนื่อง ด้วยการมุ่งเน้นไปที่การวัดและการวิเคราะห์ข้อมูลการเคลื่อนที่และการวางตัวอย่างแม่นยำ HC1 จะให้ข้อมูลเชิงลึกที่มีค่ามาก ซึ่งจะช่วยกำหนดทิศทางของภารกิจดาวเทียมในอนาคต ภารกิจพื้นฐานนี้จะปูทางไปสู่โปรเจกต์ที่เฉพาะทางและท้าทายยิ่งขึ้น สุดท้ายแล้วก็จะช่วยขับเคลื่อนความก้าวหน้าในการสำรวจและใช้ประโยชน์จากอวกาศของเราเอง
ผลลัพธ์ที่คาดหวัง (Expected Outcomes):
● ชุดข้อมูลที่ครอบคลุมซึ่งอธิบายรายละเอียดการเคลื่อนที่และการวางตัวของดาวเทียมในอวกาศ
● ความเข้าใจที่ลึกซึ้งขึ้นเกี่ยวกับประสิทธิภาพและการทำงานร่วมกันของเซ็นเซอร์และระบบต่างๆ
● การออกแบบดาวเทียมและกลยุทธ์การปฏิบัติงานที่ดีขึ้นสำหรับภารกิจในอนาคต
● การสร้างฐานความรู้ที่มั่นคงสำหรับโครงการดาวเทียมรุ่นต่อๆ ไป ที่มีเป้าหมายและการใช้งานเฉพาะทาง
สรุป (Conclusion): ภารกิจ HC1 ทุ่มเทให้กับการขยายขอบเขตความรู้ของเราเกี่ยวกับการเคลื่อนที่และการวางตัวของดาวเทียม ด้วยการเก็บรวบรวมและวิเคราะห์ข้อมูลจากเซ็นเซอร์ขั้นสูงอย่างพิถีพิถัน HC1 จะเตรียมพร้อมเวทีสำหรับภารกิจดาวเทียมในอนาคตที่จะมีเป้าหมายชัดเจนและความสามารถที่มากขึ้น ความสำเร็จของ HC1 จะเป็นหมุดหมายสำคัญในเส้นทางการสำรวจและใช้ประโยชน์จากอวกาศของเราให้มีประสิทธิภาพมากขึ้น เอาใจช่วยกันนะน้อง! สู้ๆ

Light Tracking: The Helios Cube
Helios Cube นี่คือประติมากรรมจลน์ (Kinetic Sculpture) ที่สวยงามสำหรับตั้งโต๊ะ แทนที่จะวิ่งไปมาด้วยล้อ มันใช้ฐาน Pan/Tilt หมุนโครงสร้างคริสตัลเรืองแสงของมันไปหาแหล่งกำเนิดแสงที่สว่างที่สุดในห้อง เลียนแบบพฤติกรรมโฟโตแท็กซิส (Phototaxis) ของสิ่งมีชีวิต เหมือนดอกทานตะวันที่หันตามดวงอาทิตย์เลย
The Sensor Array Bridge
เซ็นเซอร์แสงตัวเดียวไม่พอจะตรวจจับการเคลื่อนไหวหรอกน้อง เราต้องใช้เซ็นเซอร์เป็นอาร์เรย์แบบดิฟเฟอเรนเชียล
- เราเอา LDRs (Photoresistors) 4 ตัวมาติดบนสี่ด้านของพีระมิดหรือลูกบาศก์ที่พิมพ์จากเครื่อง 3D พริ้นเตอร์ (บน, ล่าง, ซ้าย, ขวา)
- Arduino อ่านค่าจากพินอนาล็อกทั้งสี่อย่างต่อเนื่อง:
analogRead(A0)ถึงA3 - The Math: คำนวณหาผลต่างระหว่างเซ็นเซอร์ที่อยู่ตรงข้ามกัน
int horizontalDifference = leftSensor - rightSensor;int verticalDifference = topSensor - bottomSensor;
Kinematic Execution
พอได้ผลต่างแล้ว Arduino ก็สั่งงาน Micro Servos (SG90) สองตัว
- ถ้า
horizontalDifference > 50(ด้านซ้ายสว่างกว่าด้านขวาเยอะ): Arduino จะสั่งให้เซอร์โว Azimuth (Pan) หมุนไปทางซ้ายจนกว่าเซ็นเซอร์ทั้งสองข้างจะได้ค่าเท่ากัน - เอาโค้ดพวกนี้ไปใส่ในลูป
whileที่ทำงานตลอดเวลา ลูกบาศก์ก็จะติดตามแสงจากไฟฉายที่เราเอาไปส่องทั่วห้องได้อย่างลื่นไหลแล้วล่ะ!
System Hardware
- Arduino Uno/Nano: สมองประมวลผล
- 4x Light Dependent Resistors (LDR): ตัวต้านทานไวแสง
- 2x Micro Servos: บนขาตั้ง Pan/Tilt
- NeoPixels: (ตัวเลือก) เอาไปติดไว้ในลูกบาศก์โปร่งแสงเพื่อเปลี่ยนสีตามปริมาณแสงที่มันจับได้! สวยงามจัดไปวัยรุ่น
HC1-A-V-1.00.3
Abstract
This paper presents an implementation of a comprehensive environmental
monitoring system utilizing Arduino-compatible GNSS, geomagnetic, and inertial
sensors. The system integrates DFRobot's GNSS, BMM150 geomagnetic sensor,
and BMI160 accelerometer/gyroscope to provide accurate geolocation, orientation,
and motion data. The sensors communicate using I2C protocol, and the data is
processed and displayed via Serial Monitor. This setup can be extended for
applications in navigation, wearables, and environmental data logging.
1. Introduction
Environmental monitoring is critical in various applications, ranging from navigation
systems to fitness tracking. Accurate data collection regarding position, orientation,
and motion enhances the functionality and reliability of these applications. This paper
details the integration of GNSS, geomagnetic, and inertial sensors with an Arduino
microcontroller, providing a robust solution for comprehensive environmental
monitoring.
2. System Components
2.1. GNSS Module The GNSS module provides geolocation data, including latitude,
longitude, altitude, and the number of satellites used. It supports multiple GNSS
systems (GPS, BeiDou, GLONASS) to ensure reliable positioning.
2.2. Geomagnetic Sensor (BMM150) The BMM150 geomagnetic sensor measures
the Earth's magnetic field across three axes (x, y, z). This data is used to determine
the compass heading and can be combined with other sensor data for enhanced
orientation tracking.
2.3. Inertial Measurement Unit (BMI160) The BMI160 includes an accelerometer
and gyroscope, providing motion and orientation data. It is capable of counting steps,
which is useful in fitness applications and wearable devices.
3. Methodology
3.1. Hardware Configuration The sensors are connected to the Arduino using the I2C
protocol, which allows for efficient and straightforward communication. The GNSS
module is powered and configured via the I2C interface, and similar procedures are
followed for the BMM150 and BMI160 sensors.
3.2. Software Implementation The software, written in C++ for the Arduino
environment, initializes and configures the sensors, collects data, and prints it to the
Serial Monitor. Error handling mechanisms ensure robust operation even in the event
of sensor initialization failures.
3.3. Data Processing and Output The collected data includes:
● GNSS: UTC time, date, latitude, longitude, altitude, speed over ground, and
course over ground.
● BMM150: Magnetic field data (x, y, z) and compass heading.
● BMI160: Step count and motion data.
The data is processed and output to the Serial Monitor, providing a comprehensive
overview of the environmental conditions.
5. Results and Discussion
The system successfully integrates and collects data from the GNSS, BMM150, and
BMI160 sensors. The GNSS module provides accurate geolocation data, while the
BMM150 sensor offers reliable geomagnetic readings, and the BMI160 sensor tracks
motion and step count. This comprehensive data collection enables robust
environmental monitoring, useful in various applications such as navigation,
wearable devices, and environmental data logging.
6. Conclusion
This paper presents a successful integration of GNSS, geomagnetic, and inertial
sensors using an Arduino microcontroller. The system demonstrates reliable
performance in collecting and displaying comprehensive environmental data. Future
work includes extending this setup to incorporate additional sensors and developing
algorithms for advanced data fusion and analysis.
7. References
● DFRobot GNSS Library: DFRobot_GNSS.h
● DFRobot BMM150 Library: DFRobot_BMM150.h
● DFRobot BMI160 Library: DFRobot_BMI160.h
● Arduino Documentation: Arduino