Hexapod Grip Arm
โปรเจกต์ open source Hexapod ของเรามีผู้สร้างขึ้นมาแล้วกว่าสองพันคนทั่วโลก และเรากำลังทำให้มันสนุกและมีประโยชน์ด้วยการเปิดตัวโปรเจกต์ Grip Arm สุดเจ๋งนี้ เช่นเดียวกับ Hexapod ทุกชิ้นส่วนโครงสร้างสามารถ 3d print ได้ง่าย อุปกรณ์อิเล็กทรอนิกส์ทั้งหมดเป็นชิ้นส่วนมาตรฐานที่มีจำหน่ายทั่วไปหรือ open source ไม่มีส่วนใดที่เป็นกรรมสิทธิ์เฉพาะ และ 3d model ทั้งหมด, source code และ คำแนะนำการสร้าง เป็น open source และเผยแพร่สู่สาธารณะ
แม้ว่าสิ่งนี้จะถูกออกแบบมาเพื่อเชื่อมต่อกับพอร์ตอุปกรณ์เสริมบน Vorpal The Hexapod แต่เนื่องจาก 3D model ทั้งหมดถูกเผยแพร่สู่สาธารณะ จึงไม่น่าจะยากเกินไปที่จะปรับใช้กับระบบหุ่นยนต์อื่นๆ
ข้อมูลเกี่ยวกับ Vorpal The Hexapod อยู่ที่นี่: Vorpal Hexapod Project Page
ความสามารถ
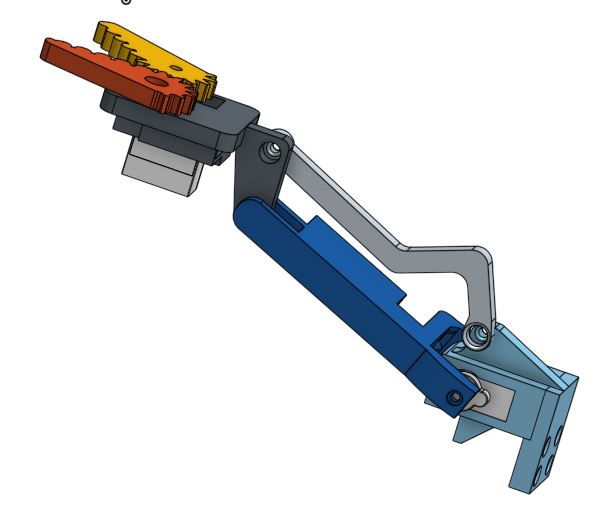
แขนใช้ micro Servo สองตัว มันสามารถลดระดับลงได้เกือบถึงพื้น (2 ซม. หรือประมาณหนึ่งนิ้ว) และสามารถยกขึ้นได้สูงประมาณส่วนบนของหมวกหุ่นยนต์ กรงเล็บที่ปลายแขนสามารถเปิดและปิดได้ สามารถจับวัตถุได้กว้างประมาณ 6 ซม. (มากกว่า 2 นิ้วเล็กน้อย) และสามารถยกวัตถุได้อย่างปลอดภัยได้ถึงประมาณ 100 กรัม (ประมาณ 4 ออนซ์)
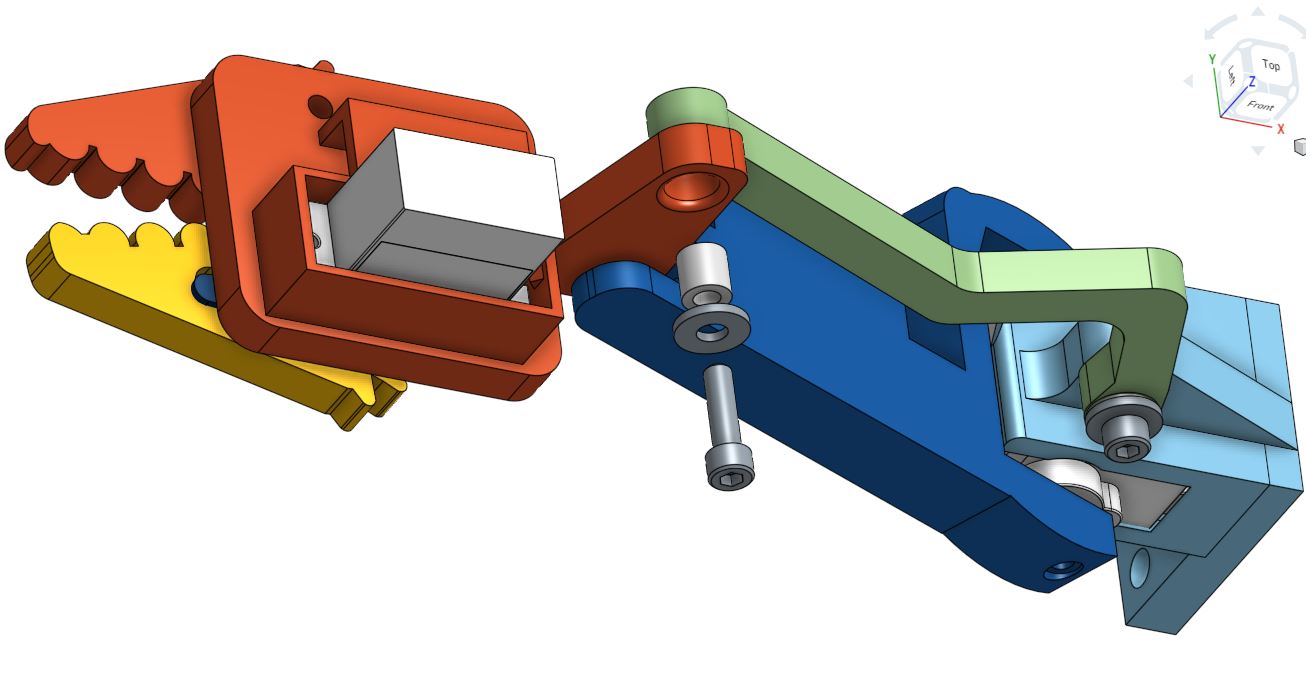
ชิ้นส่วนและการประกอบ
กระบวนการสร้างค่อนข้างตรงไปตรงมา และเรามีคำแนะนำฉบับสมบูรณ์โพสต์ไว้ที่นี่: คำแนะนำการสร้าง Grip Arm
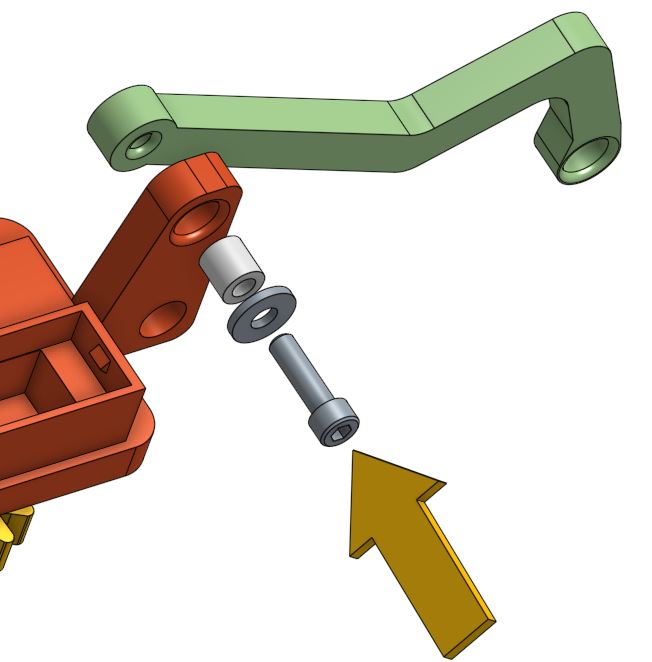
หน้าการประกอบมีรายการวัสดุ (bill of materials) ครบถ้วน เราใช้ mini Servo แบบ metal gear หนึ่งตัว (MG90 หรือรุ่นใกล้เคียง) และ Servo แบบ plastic gear หนึ่งตัวสำหรับกรงเล็บ (SG90 หรือรุ่นใกล้เคียง) กรงเล็บไม่ได้ยกน้ำหนักมากนัก และ SG Servo ก็เบากว่ามาก จึงเป็นตัวเลือกที่เหมาะสมสำหรับกรงเล็บ แขนจำเป็นต้องยกน้ำหนักที่อยู่ห่างจาก Servo และต้องการ metal gear เพื่อทนทานต่อความเค้น คุณยังต้องมีสาย Servo extension, สกรู, แหวนรอง (washers) และ nylon spacer ขนาด 6 มม. ไม่มีส่วนใดที่เป็นกรรมสิทธิ์เฉพาะ
โปรเจกต์นี้เป็น open source คุณจึงสามารถจัดหาชิ้นส่วนทั้งหมดได้เอง หากคุณต้องการสนับสนุนความพยายามในการพัฒนาของเรา เรามีชุดอุปกรณ์ที่สะดวกสบายสำหรับทั้ง Grip Arm และ Hexapod ที่นี่: Vorpal Kits หมายเหตุ: มี Servo MG90 และ SG90 ปลอมจำนวนมากในตลาดที่มีคุณภาพต่ำมาก เราเป็นผู้จำหน่ายที่ได้รับอนุญาตของ Tower Pro และ Servo ของเราเป็นของแท้และทำงานได้ดีกว่าของปลอมมาก โปรดระมัดระวัง
แขนเชื่อมต่อเข้ากับพอร์ตอุปกรณ์เสริมของ Hexapod ได้ทันที และใช้ช่องว่างบน Servo driver board ที่มีอยู่ โค้ดเวอร์ชันใหม่ที่เผยแพร่บนหน้า GitHub ของเราแล้ว ช่วยให้สามารถควบคุมแขนได้ด้วย Gamepad และยังสามารถควบคุมได้จากโปรแกรม Scratch ทำให้สิ่งนี้ทั้งให้ความรู้และความสนุกสนาน
การควบคุม Grip Arm
เราได้เผยแพร่ Arduino code เวอร์ชันใหม่ของ Hexapod เมื่อเร็วๆ นี้ เพื่อให้คุณสามารถควบคุมมันได้โดยใช้ Vorpal Gamepad (ซึ่งเป็นแบบ 3d print และไม่ได้ใช้ชิ้นส่วนที่เป็นกรรมสิทธิ์เฉพาะ)
เมื่อโหลดซอฟต์แวร์ใหม่นี้แล้ว คุณสามารถหมุนแป้นควบคุมของหุ่นยนต์ไปที่ RC mode (radio control) จากนั้นหมุนทวนเข็มนาฬิกาเล็กน้อยจนกว่าจะได้ยินเสียงบี๊บหนึ่งครั้ง นั่นคือโหมดใหม่: RC with Grip Arm ตอนนี้ปุ่ม F2 ของ Gamepad (โหมดนินจาหมายเลขสอง) จะควบคุม Grip Arm DPAD จะทำงานในโหมด F2 ดังนี้:
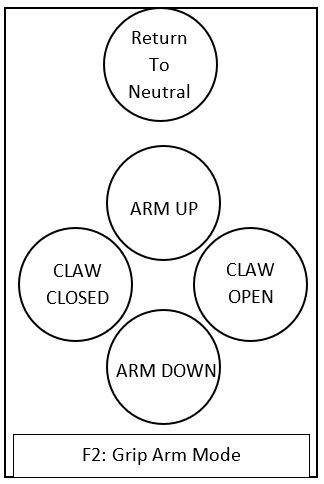
Gamepad ใช้โหมด "smooth motion" ภายในพิเศษ เพื่อให้แขนขึ้นและลงได้อย่างราบรื่น แขนจะคงตำแหน่งไว้หากคุณเปลี่ยนไปใช้โหมดอื่น เช่น การเดินหรือการเต้น
หากต้องการควบคุม Grip Arm โดยใช้บล็อก Scratch เพียงแค่ใช้บล็อก SERVO กรงเล็บคือ Servo 12 และแขนคือ Servo 13
การปรับขนาด
คุณรู้ดีว่าเราไม่สามารถหยุดอยู่แค่นี้ได้! ขณะนี้เรากำลังพัฒนา Grip Arm เวอร์ชันขนาดใหญ่พิเศษสำหรับโปรเจกต์ Max The Megapod ของเรา โปรดติดตามแขนขนาดใหญ่นี้ในช่วงต้นปี 2019
และเรากำลังคิดถึงส่วนเสริมใหม่ๆ อีกมากมายเพื่อให้โปรเจกต์ Hexapod ของเราสดใหม่และน่าตื่นเต้นอยู่เสมอ หากคุณมีอุปกรณ์เสริมหรือส่วนต่อเติมที่คุณอยากเห็น โปรดส่งข้อความหาเราที่ info@vorpalrobotics.com
ลิงก์ที่เป็นประโยชน์
รายละเอียดทางเทคนิคเพิ่มเติม
การควบคุมแบบ Bionic Multi-Linkage
โปรเจกต์นี้มุ่งเน้นไปที่การออกแบบและการควบคุมแขน Gripper ของหุ่นยนต์สำหรับหุ่นยนต์ 6 ขา (Hexapod)
- Dual-Servo Kinematics: ควบคุมด้วย Arduino แขนใช้ MG995 Servo หนึ่งตัวสำหรับการหมุน "ข้อมือ" (Wrist) และอีกตัวสำหรับการทำงาน "จับ" (Grip) เฟิร์มแวร์มีการจำกัด "Torque Limiting" ที่แม่นยำ เพื่อให้แน่ใจว่า Gripper สามารถหยิบวัตถุที่บอบบางได้โดยไม่ทำให้เสียหาย
- Object Recognition Logic: (เวอร์ชันขั้นสูง) รวม infrared proximity sensor ไว้ภายใน "ฝ่ามือ" (palm) ของ Gripper; Arduino จะปิดกรงเล็บโดยอัตโนมัติเมื่อตรวจพบวัตถุภายใน 1 ซม.
ความสมบูรณ์ของโครงสร้าง
- Load Distribution: โค้ดจะจัดการ "Holding Torque" เพื่อรักษาระดับการปิดของ Gripper