🌟 เกี่ยวกับโปรเจคนี้
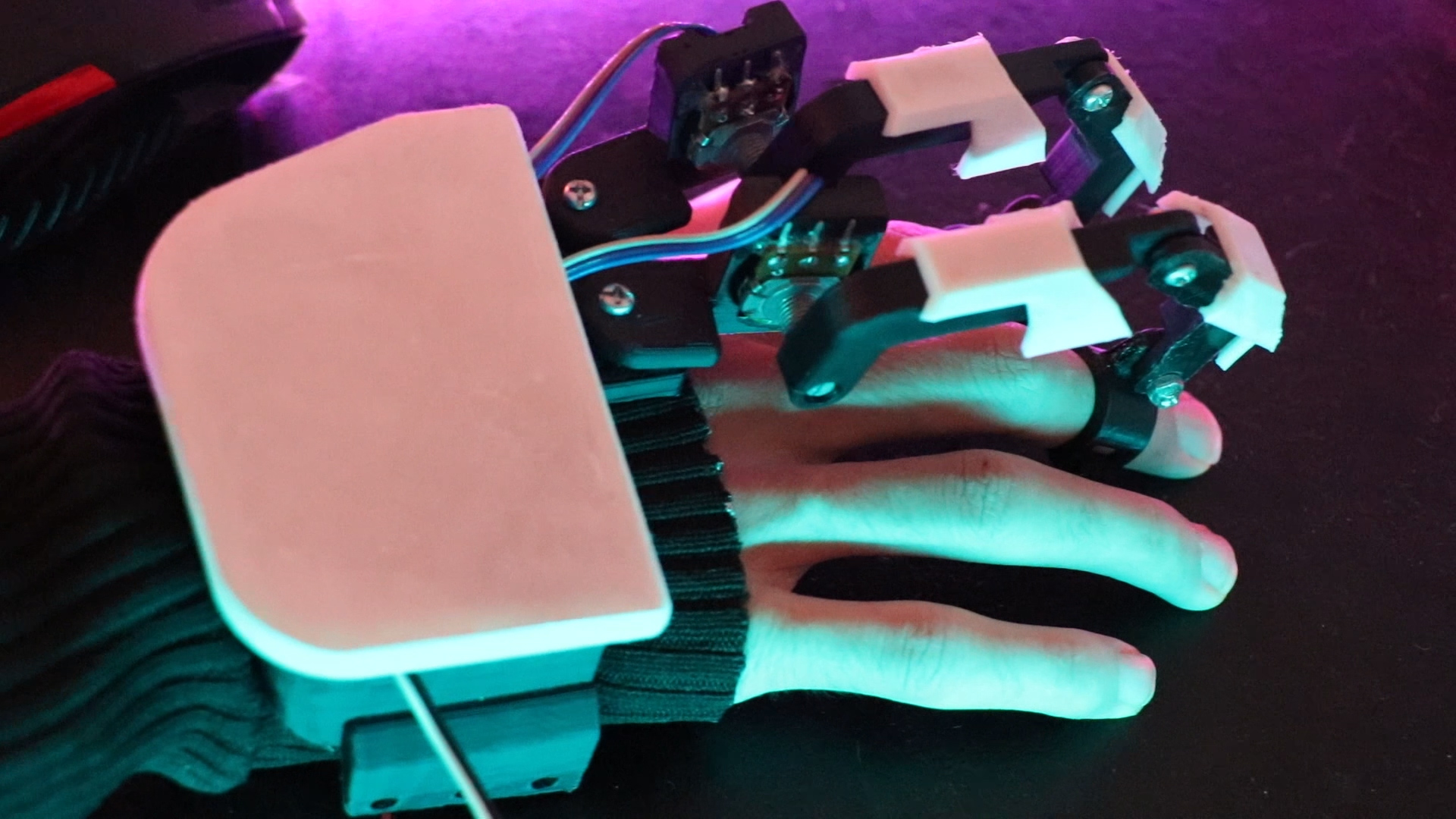
เรากำลังจะมาสร้างถุงมืออัจฉริยะที่ได้แรงบันดาลใจจากตัวละคร IANA ในเกม Rainbow Six Siege กันนะน้อง! โปรเจคนี้จะทำให้เราสามารถควบคุมอุปกรณ์จากระยะไกลได้ ด้วยการจับท่าทางมือผ่านเซ็นเซอร์ MPU6050 (Accelerometer/Gyroscope) และตัวต้านทานปรับค่าได้ (Potentiometer) สองตัว การสื่อสารไร้สายระหว่างถุงมือกับอุปกรณ์เป้าหมายใช้โมดูลวิทยุ nRF24 ตัวนี้แหละ
ภาพรวมโปรเจค
"IANA-Link" นี่คือการลงลึกเรื่อง Kinematic Telemetry และ Wireless Prop-Replica Forensics แบบจัดเต็มเลยนะฮะ ได้แรงบันดาลใจจากตัวละคร "Iana" ใน Rainbow Six Siege โปรเจคนี้จะเปลี่ยนถุงมือธรรมดาๆ ให้กลายเป็นคอนโทรลเลอร์จับท่าทาง 6-DOF แบบสุดล้ำ ด้วยการผสมผสาน Inertial Measurement Unit (IMU) Diagnostics เข้ากับการส่งสัญญาณวิทยุความเร็วสูง 2.4GHz ทำให้ IANA-Link สามารถสั่งงานอุปกรณ์จากระยะไกลผ่านการเอียงมือหรือการงอนิ้วได้แบบเนียนๆ เป็นการพิสูจน์ว่าแกดเจ็ตในหนังน่ะ เราสร้างให้ใช้งานจริงได้!
📷 รูปภาพประกอบ
🎯 ฟีเจอร์เด็ด
- ใช้คลื่นความถี่ 2.4GHz ในการสื่อสาร
- ใช้ตัวต้านทานปรับค่าได้ (Potentiometer) 2 ตัว เพื่อติดตามการเคลื่อนไหวนิ้วสองนิ้ว
- ใช้ MPU6050 เพื่อติดตามการเคลื่อนไหวของมือ
ลงลึกรายละเอียดทางเทคนิค (จัดเต็มให้เลย!)
- MPU6050 6-DOF Inertial Forensics:
- Gravity Vector Analysis: ระบบใช้เซ็นเซอร์ MEMS Accelerometer และ Gyroscope ที่อยู่ใน MPU6050 นะฮะ Arduino Nano จะประมวลผลข้อมูลดิบ $X, Y, Z$ ผ่านการสื่อสารแบบ I2C ด้วยการคำนวณ Gravity Vector และ Angular Velocity เฟิร์มแวร์จะได้มุมออยเลอร์ (Pitch และ Roll) ที่แม่นยำ เพื่อแปลงการหมุนมือให้เป็นสัญญาณควบคุมแบบอนาล็อก
- DMP Motion-Smoothing: เพื่อป้องกันปัญหา "Drift" และ "Jitter" ที่มีอยู่ในค่าอ่าน IMU ดิบ โปรเจคนี้ใช้อัลกอริทึม Motion-Smoothing (หรือ Digital Motion Processing) เพื่อให้การเคลื่อนไหวของอุปกรณ์เป้าหมายลื่นไหลและแม่นยำ
- nRF24L01 Wireless Radio Harmonics:
- The 2.4GHz SPI Bridge: การสื่อสารระหว่างถุงมือ (ตัวส่ง) และอุปกรณ์เป้าหมาย (ตัวรับ) ถูกจัดการโดยโมดูล nRF24L01+ ที่ทำงานบนย่านความถี่ 2.4GHz ISM ระบบใช้เทคโนโลยี Enhanced ShockBurst™ เพื่อจัดการแพ็กเก็ต การยืนยันการรับ (Acknowledgment) และการส่งซ้ำอัตโนมัติ
- Pipe Address Forensics: วิทยุตัวนี้ใช้ที่อยู่ Pipe ขนาด 40-bit ที่ไม่ซ้ำใคร เพื่อให้แน่ใจว่าแกดเจ็ตหลายๆ ชิ้นสามารถทำงานในบริเวณใกล้เคียงกันได้โดยไม่มีการรบกวนกัน โครงสร้างของ Payload ถูกออกแบบให้พอดีกับแพ็กเก็ตขนาด 32-byte เพียงแพ็กเก็ตเดียว ซึ่งช่วยลด "Air-Time" และทำให้ความหน่วงของระบบต่ำกว่า 10ms
- Finger-Flex Potentiometric Diagnostics:
- Voltage-Divider Mapping: ตัวต้านทานปรับค่าได้ (Potentiometer) ขนาด 10k สองตัวถูกติดตั้งไว้ที่ข้อนิ้วของถุงมือ เมื่อผู้ใช้งอนิ้ว ความต้านทานจะเปลี่ยนไป ทำให้แรงดันไฟฟ้าอนาล็อกที่พิน
A2และA3เปลี่ยนตาม - The Mapping Algorithm: ค่า ADC ขนาด 10-bit ดิบ (0-1023) จะถูกปรับสเกลผ่านฟังก์ชัน
map()ให้ตรงกับความละเอียดที่ตัวรับต้องการ (เช่น 0-180 สำหรับมุมเซอร์โว หรือ 0-255 สำหรับความเร็ว PWM) สร้างการเชื่อมโยงโดยตรงระหว่างการเคลื่อนไหวของมนุษย์กับการตอบสนองของเครื่องจักรกล
- Voltage-Divider Mapping: ตัวต้านทานปรับค่าได้ (Potentiometer) ขนาด 10k สองตัวถูกติดตั้งไว้ที่ข้อนิ้วของถุงมือ เมื่อผู้ใช้งอนิ้ว ความต้านทานจะเปลี่ยนไป ทำให้แรงดันไฟฟ้าอนาล็อกที่พิน
🧰 เริ่มต้นกันเลย
ถ้าอยากสร้างโปรเจคนี้ขึ้นมาจริงๆ น้องต้องมีอุปกรณ์และเครื่องมือตามนี้ก่อน:
- Arduino Nano
- MPU6050 ไจโรสโคป
- nRF24L01 ตัวส่งสัญญาณไร้สาย
- โพเทนชิออมิเตอร์ 2 ตัว
วิศวกรรมและการนำไปใช้
- โครงสร้างและการติดตั้งบนตัว:
- การยศาสตร์จาก PLA พิมพ์ 3 มิติ: วงจรทั้งหมดจะถูกบรรจุอยู่ในเคสพิมพ์ 3 มิติที่ออกแบบมาให้แนบสนิทกับหลังมือ วิธีนี้ช่วยป้องกันสายสัญญาณ SPI และ I2C ที่บอบบางจากแรงกระแทกเวลาน้องขยับมือบ่อยๆ
- ตรรกะเพื่อความสมบูรณ์ของสัญญาณ: เนื่องจาก nRF24 และ MPU6050 ใช้ไฟจาก Nano ตัวเดียวกัน แนะนำให้ใส่ตัวเก็บประจุบายพาส (Decoupling Capacitor) ขนาด 10uF ที่ขา
VCCของโมดูล nRF24 เพื่อดูดซับสไปค์กระแสตอนส่งสัญญาณวิทยุ ป้องกันไม่ให้บัส I2C ค้าง
- ลอจิกโฟลว์ของ HMI:
- โหนด "ตัวส่ง" (Transmitter) จะคอยอ่านค่าจาก IMU และโพเทนชิออมิเตอร์ในลูปแบบไม่บล็อก (non-blocking loop) ถ้าตรวจจับการเปลี่ยนแปลงค่า $(\Delta)$ ที่มีนัยสำคัญในแกนใดๆ ก็ตาม มันจะส่งชุดพิกัดใหม่ผ่านไปทางวิทยุให้กับ "ตัวรับ" (Receiver) ซึ่งจะทำหน้าที่สั่งงานการเคลื่อนไหวที่สอดคล้องกัน (เช่น ขับรถหุ่นยนต์หรือระบบกิมบอล)
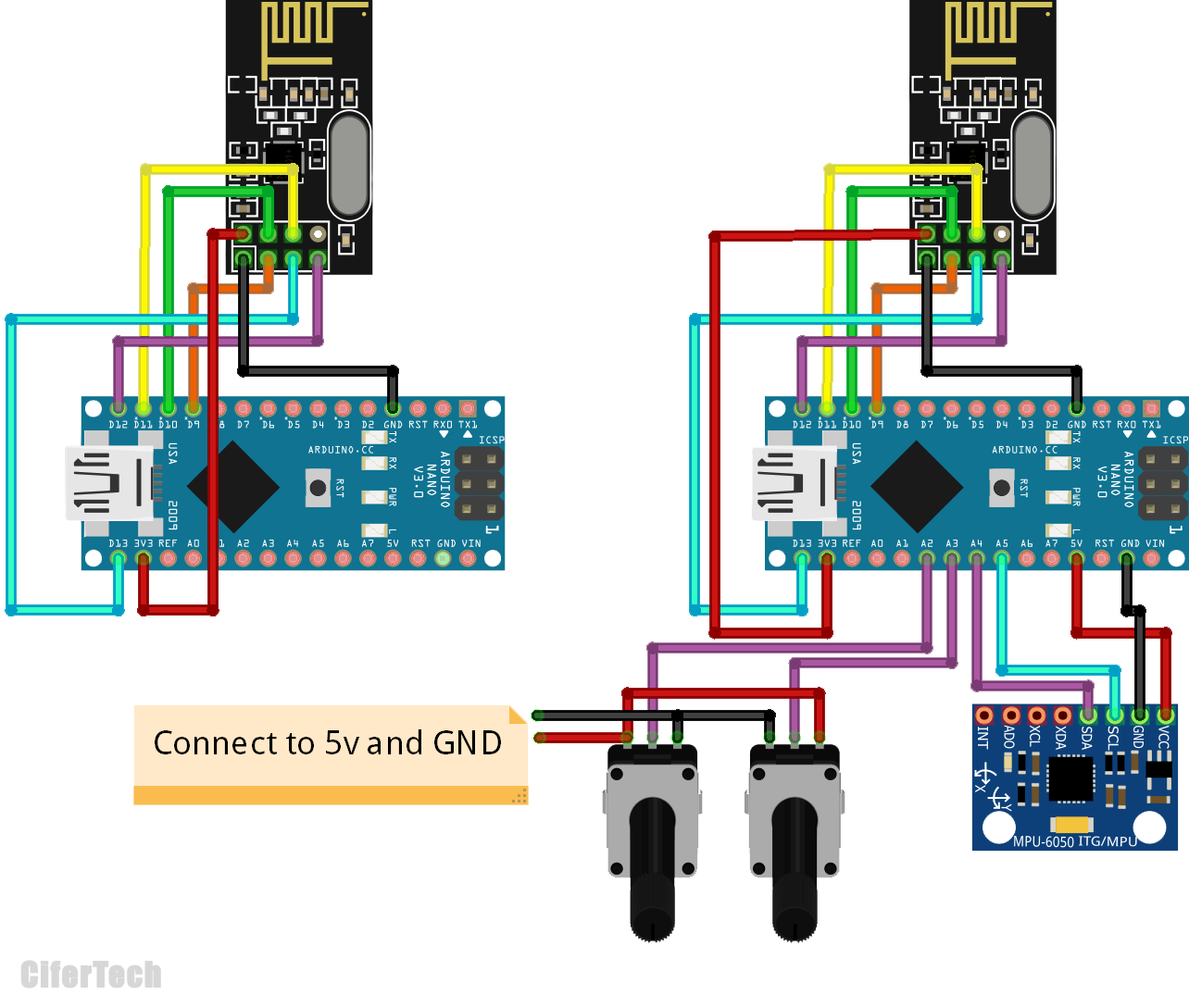
🔌 วงจร
ต่อสายตามตารางและแผนผังวงจรด้านล่างนี้เลย
- ตัวส่ง (TRANSMITTER)
| Arduino | nRF24 |
|---|---|
| 9 | CE |
| 13 | SCK |
| 12 | MISO |
| 10 | CSN |
| 11 | MOSI |
| 3V3 | Vcc |
| GND | GND |
| Arduino | MPU6050 |
|---|---|
| A4 | SDA |
| A5 | SCL |
| 5v | VCC |
| GND | GND |
| Arduino | Potentiometer1 |
|---|---|
| Wiper | A2 |
| 5v | VCC |
| GND | GND |
| Arduino | Potentiometer2 |
|---|---|
| Wiper | A3 |
| 5v | VCC |
| GND | GND |
- ตัวรับ (RECEIVER)
| Arduino | nRF24 |
|---|---|
| 9 | CE |
| 13 | SCK |
| 12 | MISO |
| 10 | CSN |
| 11 | MOSI |
| 3V3 | Vcc |
| GND | GND |
- แผนผังวงจรแบบเต็ม
⚙️ ติดตั้งไลบรารี
น้องต้องติดตั้งไลบรารีที่จำเป็นใน Arduino IDE ตามขั้นตอนนี้:
- ไปที่ Sketch > Include Library > Manage Libraries
- ค้นหา nRF24L01 แล้วกด Install
- ค้นหา RF24 แล้วกด Install
- ค้นหา MPU6050 แล้วกด Install
จัดไปวัยรุ่น! ติดตั้งเสร็จก็พร้อมลุยโค้ดได้เลย สู้งานนะน้อง
👀 วิธีใช้งาน
หลังจากอัพโหลดโค้ดเสร็จแล้ว สุดท้ายก็ถึงเวลาทดสอบถุงมืออัจฉริยะของเราแล้ววว! โดยการส่งข้อมูลแบบไร้สายไปยังอุปกรณ์อื่น แล้วดูว่ามันตอบสนองถูกต้องตามที่เราตั้งใจไว้รึเปล่า จากนั้นก็สามารถปรับแต่งโค้ดเพิ่มเติมได้ตามใจชอบ เพื่อให้เหมาะกับงานที่เราอยากทำ จะได้เพิ่มฟังก์ชันให้เจ้า Smart Glove นี้เจ๋งกว่าเดิมอีก!
สรุปปิดโครงการ
IANA-Link โครงการนี้เป็นตัวอย่างที่แสดงให้เห็นพลังของ การออกแบบอินเทอร์เฟซข้ามรูปแบบ (Cross-Format Interface Design) อย่างชัดเจน ด้วยการเชี่ยวชาญในเรื่อง IMU Forensics และคลื่นวิทยุ nRF24 Radio Harmonics ทีม CiferTech ก็สามารถเชื่อมโยงช่องว่างระหว่างการทำอุปกรณ์ประกอบอิเล็กทรอนิกส์ (prop-making) กับการควบคุมด้วยท่าทางระดับอุตสาหกรรมได้สำเร็จ เป็นพิมพ์เขียวที่แข็งแกร่งให้กับอุปกรณ์แมคคาทรอนิกส์แบบสวมใส่รุ่นต่อไปเลยทีเดียว
Gestural Dominance: ควบคุมอินเทอร์เฟซมนุษย์-เครื่องจักรแบบไร้สายให้อยู่หมัด ด้วยศาสตร์แห่ง IMU forensics.
🤝 ติดต่อพี่ได้นะ
CiferTech
Project Link: