มาเลยน้องๆ! วันนี้เราจะมาสร้าง "รถอัจฉริยะหลบหลีกสิ่งกีดขวาง" กัน
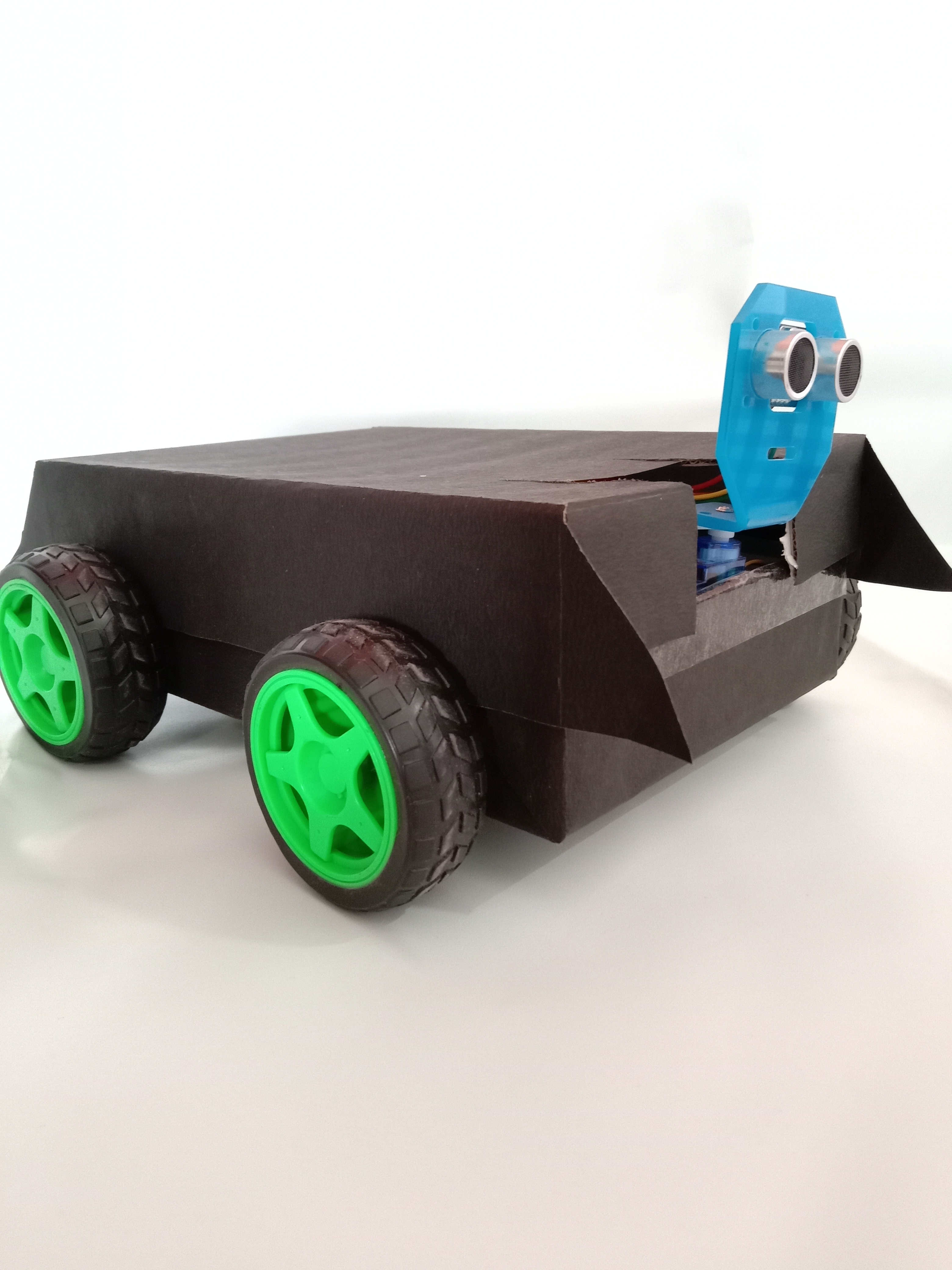
รถคันนี้ใช้ของพวก มอเตอร์ BO 4 ตัว, ล้อ 4 ล้อ, Arduino, Motor Driver, Servo Motor, เซ็นเซอร์อัลตราโซนิก (Ultrasonic Sensor) ฯลฯ
โปรเจคนี้คือ คลาสระดับมาสเตอร์ เรื่องตรรกะการนำทางอัตโนมัติและเมคคาทรอนิกส์แบบตอบสนองทันทีเลย รถอัจฉริยะหลบหลีกสิ่งกีดขวางคือ ทรัพย์สินหุ่นยนต์สมรรถนะสูง ที่ออกแบบมาเพื่อหาทางเดินเองได้โดยไม่ต้องให้มนุษย์มาคอยจับท้ายทอย ด้วยการใช้ HC-SR04 ตรวจจับระยะด้วยคลื่นเสียง (Ultrasonic Triangulation) และ SG90 หมุนส่องสำรวจ (scanning-aperture HUDs) โปรเจคนี้จะพาน้องไปสร้าง "โมบายโหนด" สุดล้ำ ที่จัดการทั้งการรับรู้สภาพแวดล้อมแบบเรียลไทม์และการขับเคลื่อนบนพื้นผิวต่างๆ ด้วยความน่าเชื่อถือระดับอุตสาหกรรม
พี่จะอธิบายทุกขั้นตอนให้ แต่พี่ว่าน้องเรียนรู้จากวิดีโอน่าจะเห็นภาพชัดกว่า
ดังนั้น พี่จะอธิบายทุกอย่างผ่าน วิดีโอ นี้เลย
ดูให้จบนะ แล้วอย่าลืม Subscribe กันด้วย จะได้ไม่พลาดคลิปสอนเจ๋งๆ อีก
ภาพรวมโครงสร้างการนำทางและสถาปัตยกรรมตรรกะ
เฟรมเวิร์กการหาทางอัตโนมัติ (Autonomous Pathfinding Framework) ทำงานผ่านวงจรชีวิตเฉพาะทางแบบ สแกน-วิเคราะห์-หลบ (Scan-Analyze-Evade) ระบบนี้สร้างขึ้นบน โมเดลแก้ไขเวกเตอร์ (Vector-Correction Model) ที่มีความน่าเชื่อถือสูง:
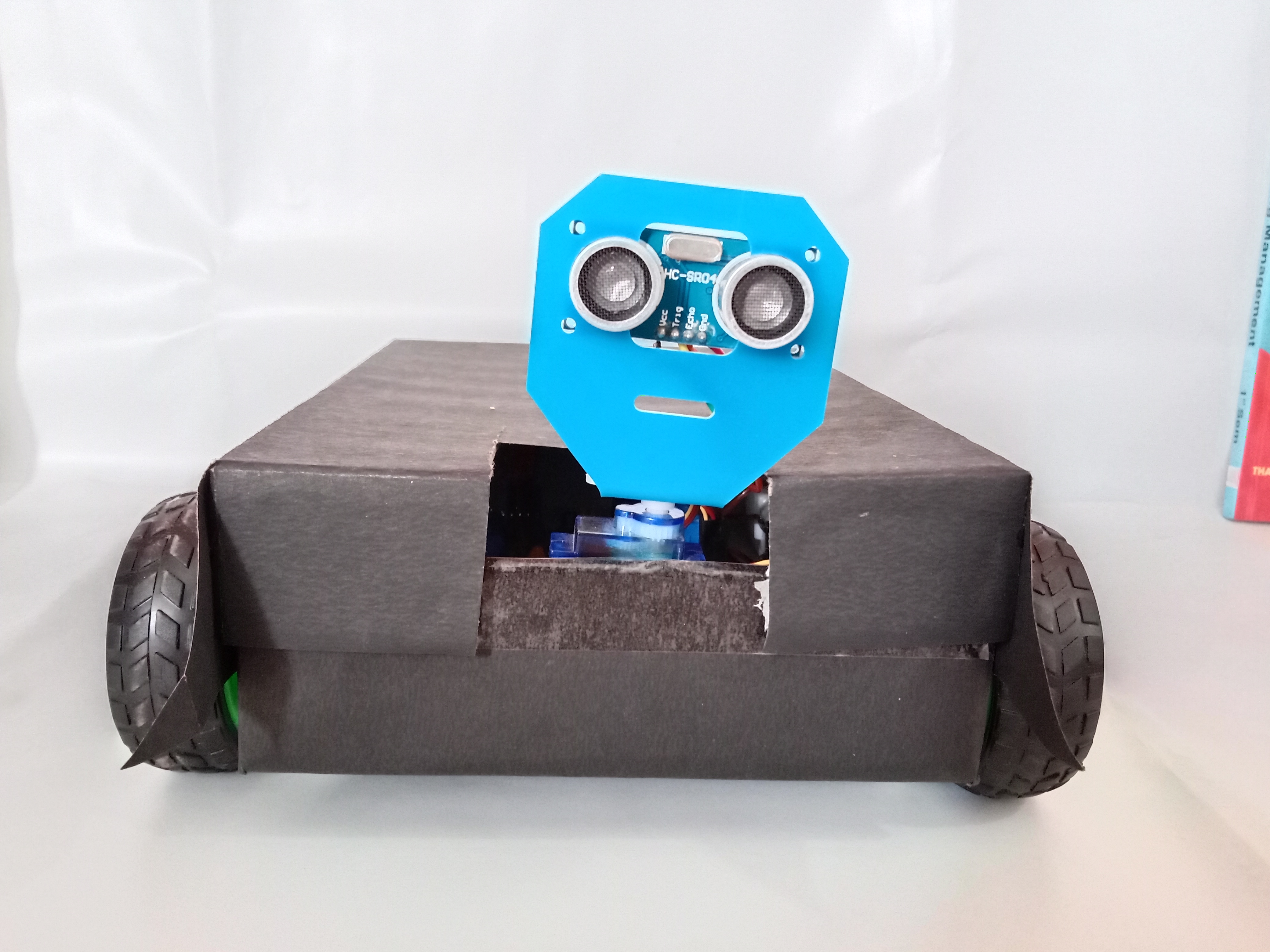
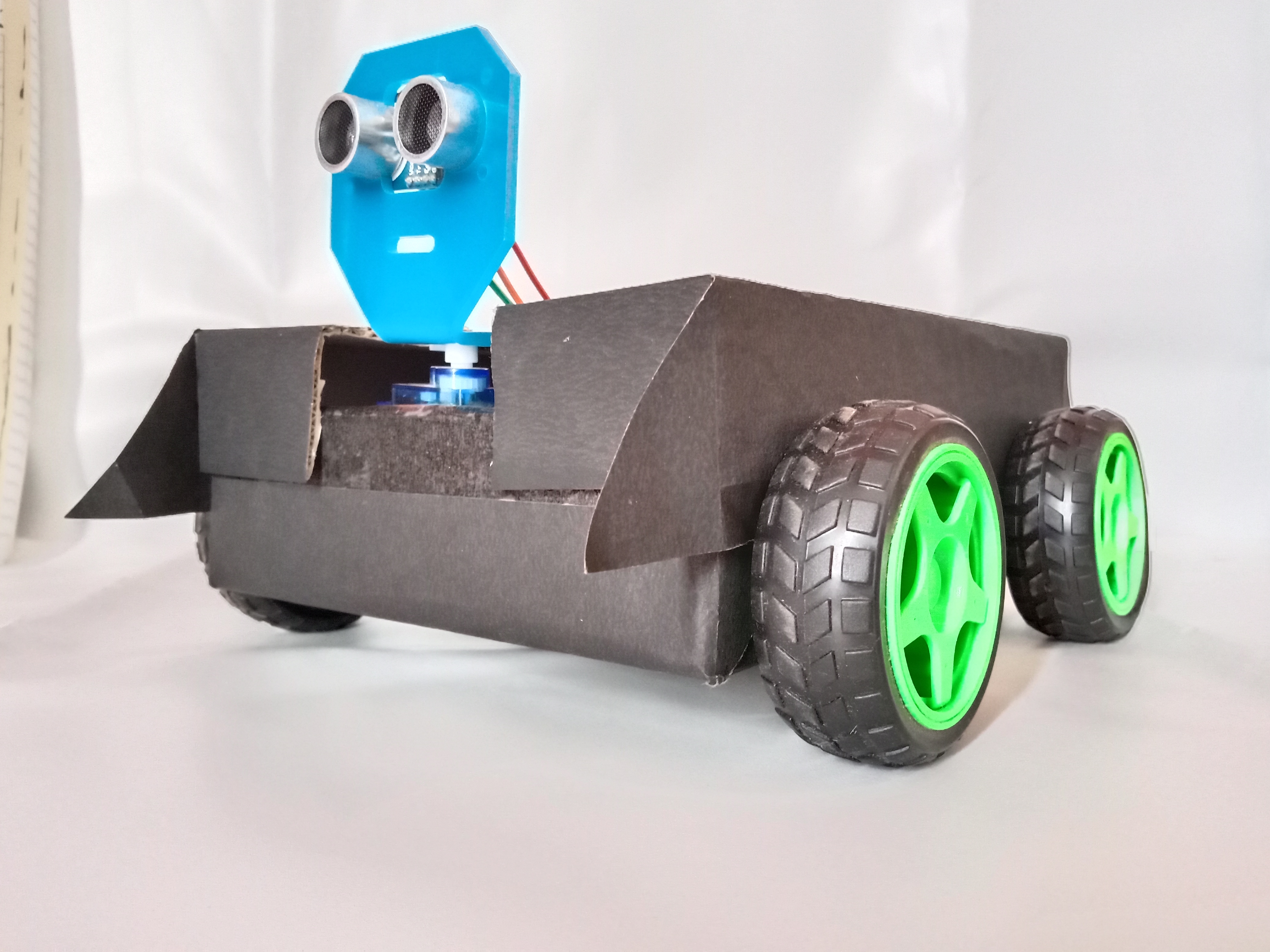
- ศูนย์รับรู้ด้วยเสียง HC-SR04 (HC-SR04 Acoustic Perception Hub): หรือ "โหนดวิเคราะห์พื้นที่ (Spatial Analysis Node)" ด้วยการปล่อยคลื่นเสียงอัลตราโซนิกและวัด เวลาการเดินทางของคลื่น (Time-of-Flight หรือ ToF) ระบบจะคำนวณระยะห่างของวัตถุด้วยความแม่นยำระดับต่ำกว่าหนึ่งเซนติเมตร สิ่งนี้ให้ ค่าพื้นฐานระยะใกล้ (Proximity Baseline) แก่เฟิร์มแวร์นำทางอย่างต่อเนื่อง
- ช่องส่องสำรวจที่ขับเคลื่อนด้วยเซอร์โว (Servo-Actuated Scanning Aperture): หัวใจของตรรกะ เซ็นเซอร์อัลตราโซนิกจะถูกติดตั้งบน SG90 ไมโครเซอร์โว เมื่อตรวจพบสิ่งกีดขวางใน "โซนเตือน (Warning Zone)" Arduino จะสั่งให้ทำ การส่องสำรวจสภาพแวดล้อม 180 องศา (HUD) เพื่อเปรียบเทียบระยะทางซ้ายและขวา แล้วตัดสินใจเลือกทิศทางหลบที่ประสิทธิภาพสูงสุด
- เมทริกซ์ขับเคลื่อนกระแสสูง L298N (L298N High-Current Drive Matrix): ศูนย์กลางการขับเคลื่อน Arduino UNO จะแปลงเวกเตอร์นำทางเป็น สัญญาณ PWM สำหรับ H-Bridge ซึ่งทำให้สามารถควบคุมมอเตอร์ BO ทั้งสี่ตัวได้อย่างอิสระ ทำให้รถสามารถหมุนตัว 360 องศาและปรับความเร็วได้อย่างแม่นยำ
โครงสร้างพื้นฐานฮาร์ดแวร์และการออกแบบ
- Arduino UNO R3 (ศูนย์บัญชาการ): ไมโครคอนโทรลเลอร์ตัวท็อปที่เลือกมาเพื่อทำหน้าที่เป็น สะพานเชื่อมจากการรับรู้สู่การเคลื่อนไหว (Perception-to-Motion Bridge) ประสานงานระหว่างพัลส์อัลตราโซนิกในระดับมิลลิวินาทีและการสลับเฟสของ H-Bridge
- แท่นหมุนส่องสำรวจ SG90 (SG90 Scanning Platform): ถูกเลือกมาเป็นพิเศษเพราะ ความแม่นยำเชิงมุมสูง (High Radial Accuracy) โหนดนี้ให้ "ตรรกะแบบนักสำรวจ (Surveyor-Logic)" ที่จำเป็นสำหรับรถในการมองหาทางเลี้ยวก่อนจะตัดสินใจเดินทาง
- ระบบขับเคลื่อนด้วยมอเตอร์ BO 4 ล้อ (4WD BO-Motor Propulsion Rail): ระบบนี้เข้าถึงการเคลื่อนที่ระดับมืออาชีพผ่าน ตารางแรงบิดขับเคลื่อนสี่ล้อ (Quad-Drive Torque Grid) ด้วยการใช้มอเตอร์เกียร์สี่ตัว หุ่นยนต์สามารถเอาชนะสิ่งกีดขวางเล็กน้อยบนพื้นผิวได้ ในขณะที่ยังรักษาความเร็วในสภาวะ "คงที่ (Steady-State)"
- ศูนย์รวมโครงสร้างตัวถังแบบกำหนดเอง (Custom-Chassis Integration Hub): การออกแบบให้ความสำคัญกับ ความหลากหลายเชิงกลไก (Mechanical Versatility) ไม่ว่าจะใช้โครงอะคริลิกเฉพาะทางหรือตัวถังที่สร้างเอง การติดตั้งชุดเซ็นเซอร์อัลตราโซนิกและเซอร์โวแบบโมดูลาร์จะช่วยให้มั่นใจใน "แนวสายตา (Line-of-Sight)" ที่ดีที่สุดสำหรับเซ็นเซอร์เสียง
น้องจะใช้กล่องอะไรก็ได้ตามสะดวกใจ จะตกแต่งเพิ่มเติมยังไงก็ได้หมด ตามสไตล์น้องเลย
ตรรกะทางเทคโนโลยีและอัลกอริทึมการทำงาน
ระบบของเรามีความน่าเชื่อถือระดับมืออาชีพได้ เพราะใช้ กลยุทธ์การควบคุมเฟิร์มแวร์ หลายอย่างแบบจัดเต็ม:
- โหมด HUD พร้อมเกณฑ์ปรับเปลี่ยนแบบไดนามิก: เฟิร์มแวร์ใช้ ตรรกะระยะแบบฮิสเทอรีซิส (Hysteresis Distance-Logic) ด้วยการตั้งค่า "ขีดจำกัดเตือน" (เช่น 20 ซม.) ระบบจะหลีกเลี่ยงการเคลื่อนที่แบบกระตุกๆ หยุดๆ ทำให้การเปลี่ยนจากโหมดบินไปข้างหน้าเป็นโหมดสแกนของ HUD นั้นลื่นไหลมาก
- ตรรกะการสแกนแบบ Bread-First: ระบบทำงานได้ประสิทธิภาพระดับโปรด้วย การเบี่ยงลำดับความสำคัญแบบ ซ้าย-กลาง-ขวา (Left-Center-Right Priority Shunt) ถ้าทางตรงกลางถูกบล็อก Arduino จะสุ่มตรวจสอบ "HUD ด้านข้าง" ทันทีเพื่อหา ช่องว่างที่ใหญ่ที่สุด (Gap-Vector) ที่ใช้ได้
- ราง PWM แบบสตาร์ตนุ่ม (Soft-Start Rail): โปรเจกต์นี้ "ทนงานสุดๆ (Gear-Hardened)" เพราะมีระบบเร่งความเร็วมอเตอร์แบบค่อยเป็นค่อยไป ช่วยป้องกันไม่ให้เกิด สไปค์กระแสสูงทันที (high-current spikes) บนรางไฟแบตเตอรี่ ทำให้อายุการใช้งานของ ชันต์จ่ายไฟ 9V (9V power-shunt) ยาวนานขึ้น
- ความสามารถในการขยายฮาร์ดแวร์: สถาปัตยกรรมแบบโมดูลาร์นี้ผ่านการทดสอบสำหรับการหลบหลีกพื้นฐานแล้ว และมัน "พร้อมสำหรับ SLAM" ด้วยนะ มีตัวเลือกให้เชื่อมต่อโมดูล Bluetooth หรือ Wi-Fi เพื่อใช้ การควบคุมและรับข้อมูลระยะไกล (Override-Telemetry) และบันทึกการนำทางแบบเรียลไทม์
ทำไมโปรเจกต์นี้ถึงสำคัญนัก
การเชี่ยวชาญ การนำทางอัตโนมัติและการขับเคลื่อนแบบตอบสนอง (Autonomous Navigation and Reactive Actuation) เป็นทักษะพื้นฐานที่ขาดไม่ได้สำหรับ วิศวกรหุ่นยนต์และนักพัฒนารถยนต์ขับเคลื่อนอัตโนมัติ มันสอนให้คุณออกแบบระบบ "การตัดสินใจ" ที่รับรู้สภาพแวดล้อมและตอบสนองในเวลาจริง—ซึ่งเป็นทักษะสำคัญสำหรับการออกแบบ AGVs (รถนำทางอัตโนมัติ) ในอุตสาหกรรม, ดรอนในคลังสินค้า, หรือโรเวอร์สำรวจอัตโนมัติ นอกจากวงการหุ่นยนต์แล้ว หลักการเดียวกันนี้ยังถูกใช้ใน ระบบช่วยเหลือผู้ขับขี่และ HUDs ในรถยนต์ (Automotive Safety-ADAs HUDs), ระบบเตือนความใกล้ชิดในอุตสาหกรรม (Industrial Proximity-Alerts), และ ระบบนำทางของหุ่นยนต์ดูดฝุ่นอัจฉริยะ (Smart-Vacuum Navigation Systems) การสร้างโปรเจกต์นี้พิสูจน์แล้วว่าคุณสามารถออกแบบทรัพย์สินอัตโนมัติระดับมืออาชีพ ที่ให้ความสำคัญกับความแม่นยำของตรรกะเซนเซอร์, ความน่าเชื่อถือของการตอบสนองของแมคคาทรอนิกส์, และการมองภาพการหาทางที่ชาญฉลาด
ทิปวิศวะแบบเน้นๆ: ถ้ารถของน้อง "สะดุด" หรือรีเซ็ตตัวเองตอนมอเตอร์เริ่มทำงาน ให้ตรวจ ชันต์แยกแหล่งจ่ายไฟ (Power-Isolation Shunt) ของน้องซะ มอเตอร์นี่สร้าง แรงดันตก (Voltage-Sag) และสัญญาณรบกวนจากขดลวด (Inductive Noise) มหาศาลเลย ถ้าอยากได้ประสบการณ์ "ล็อกเป้า" แบบมืออาชีพจริงๆ ให้ใช้ แหล่งจ่ายไฟแยก สำหรับ Arduino และ L298N (แต่ต้องต่อกราวด์ร่วมกันนะ) วิธีนี้จะทำให้ HUD การนำทางของน้องนิ่งเป๊ะ แม้จะทำงานภายใต้ภาระหนักๆ ก็ตาม
ข้อมูล Frontmatter ดั้งเดิม
apps: - "1x Arduino IDE (Firmware Development Environment)" author: "lakshyajhalani56" category: "Motors & Robotics" components: - "1x Arduino UNO R3 (Logical Navigation Hub)" - "1x L298N Motor Driver Shield (High-Current Actuation Node)" - "1x HC-SR04 Ultrasonic Sensor (Acoustic Perception Node)" - "1x SG90 Micro-Servo (Scanning-Aperture Actuator)" - "4x 6V DC BO Motors (Propulsion Traction Logic)" - "4x Grippy Wheels (Structural Motion Interface)" - "1x 9V Li-ion Battery (Energy Rail Reservoir)" - "1x Toggle Switch (Power-Rail Safety Interlock)" - "1x Double-Sided Foam Tape (Component Adhesion Shunt)" - "1x Jumper Wire Set (Signal-Bus Logic Harness)" description: "มาเรียนวิธีสร้างรถสุดตึงกัน! เราจะทำให้รถคันนี้ขับเองได้ และเปลี่ยนทิศทางอัตโนมัติทันทีเมื่อเซนเซอร์ตรวจจับสิ่งกีดขวาง ใช้ ArduinoUno เป็นสมอง ควบคุมมอเตอร์และเซนเซอร์ จัดไปแบบเทพๆ เลย!" difficulty: "Intermediate" documentationLinks: [] downloadableFiles: - "https://projects.arduinocontent.cc/a125ee4a-2026-42a4-b338-83ed5f0775c4.ino" encryptedPayload: "U2FsdGVkX18KiiW3lnRROcCIr2cNzjaoGMduQpXh+itd4KRkFRyg2vLR85ClM+BJZ7IiRKH2I2QGLgN7cdkgGHHupX+xe7m96r1GThnN/NQ=" heroImage: "https://cdn.jsdelivr.net/gh/bigboxthailand/arduino-assets@main/images/projects/how-to-make-a-obstacle-avoiding-car-smart-car-arduinouno-5e9cfb_cover.jpg" lang: "en" likes: 0 passwordHash: "a4cb289a50e514154d42d8b5ecad84fd0212fdc4391cec41ec39593ab65ffe6b" price: 1120 seoDescription: "The official Obstacle Avoiding Car guide. Learn to build a professional-grade autonomous robot using Arduino UNO, HC-SR04 ultrasonic scanning, and L298N propulsion HUD." tags: - "bo motors" - "obstacle avoiding robot" - "arduino uno" - "ultrasonic sensor" - "arduino projects" - "obstacle avoiding car using ar" - "arduino car projects" - "arduino car code" - "arduino car ultrasonic sensor" - "arduino car ultrasonic sensor" - "arduino robot car ultrasonic s" - "arduino rc car with ultrasonic" - "gear motors" - "arduino car" - "obstacle avoiding car" - "ultrasonicsensor" title: "สร้างรถอัจฉริยะหลบหลีกสิ่งกีดขวางด้วย ArduinoUno | งานง่ายแต่หล่อ วัยรุ่นต้องลอง!" tools: - "1x Soldering Station (Circuit Integration)" - "1x Glue Gun (Structural Stability Center)" videoLinks: - "https://www.youtube.com/embed/I_0QLd3Qp34" - "https://www.youtube.com/embed/I_0QLd3Qp34" views: 4135