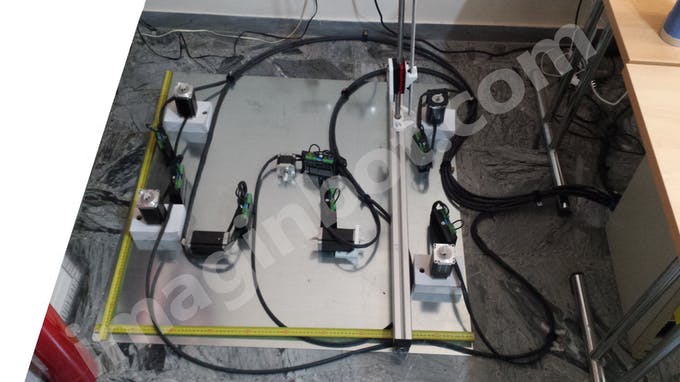
ภาพรวมโปรเจค
"Imaginbot-Core" นี่คือการลงมือสร้าง ระบบจลนศาสตร์ CNC แบบอะซิงโครนัส และ โครงสร้างกำลังงานระดับอุตสาหกรรม อย่างจริงจังเลยนะฮะ ออกแบบมาเพื่อควบคุมปริมาตรการพิมพ์ 3D ขนาดยักษ์ 1 ลูกบาศก์เมตรโดยเฉพาะ โปรเจคนี้สร้างสถาปัตยกรรมฮาร์ดแวร์ที่ละเอียดอ่อนผ่าน Arduino Mega 2560 เราไปเจาะลึกเรื่องการแปลงเส้นทางเวกเตอร์ G-Code ในอวกาศ ให้กลายเป็นพัลส์สเต็ปปิ้งแรงดันสูงเฉพาะจุด การสร้างเน้นเรื่อง การแยกวงจรไฟฟ้าอย่างสมบูรณ์ ระหว่างไดรเวอร์ทั้งเจ็ดโหนด (M1-M7), การวิเคราะห์การซิงค์แกน Z สี่ตัว, และการจัดการภาระความร้อนมหาศาล
บล็อกไดอะแกรม
เชื่อมต่อโมดูลต่างๆ ของระบบตามแผนภาพนี้ที่แนบไว้ในส่วน SCHEMATICS (อยู่ท้ายหน้า) อย่าลืมดูดีๆ นะน้อง

ลงลึกเรื่องเทคนิค
- การควบคุมจลนศาสตร์สเกลยักษ์:
- อาร์เรย์ลอจิกขับสเต็ปเปอร์แบบกระจายตัว: เราใช้ไดรเวอร์สเต็ปเปอร์เกรดอุตสาหกรรมภายนอก แทนที่จะใช้โมดูลบนบอร์ดที่เปราะบาง (เช่น A4988/DRV8825) งานวิเคราะห์ (Forensics) เกี่ยวข้องกับการวัด "การวิเคราะห์สัญญาณลดทอน (Signal-Degradation Analytics)"; Mega 2560 จะส่งสัญญาณลอจิกสแควร์เวฟ 5V แยกกันสำหรับ
PUL(พัลส์),DIR(ทิศทาง), และEN(เปิดใช้งาน) ผ่านสายเชื่อมต่อที่แยกวงจร การวินิจฉัยเน้นที่ "การลดทอนด้วยสายคู่บิดเกลียว (Twisted-Pair Mitigation)" โดย ห้ามใช้สายสัญญาณลอจิกคู่บิด เพื่อป้องกันการรบกวนเหนี่ยวนำข้ามสาย (inductive cross-talk) ในอัตราพัลส์ความถี่สูงสุดขีดที่ส่งผ่านระยะทางโครงสร้างที่ยาวมาก - การซิงโครไนซ์แกน Z สี่ตัว: การควบคุมแกนตง (Gantry) ขนาด 1 ลูกบาศก์เมตรต้องการความมั่นคงของแกน Z อย่างลึกซึ้ง งานวิเคราะห์รวมถึงการตรวจสอบ "ความล่าช้าในการก้าวพร้อมกัน (Concurrent-Step Latency)"; โดยใช้ไดรเวอร์อิสระสี่ตัว (M3, M4, M5, M6) ที่เชื่อมกับช่องลอจิกแบบขนาน เพื่อให้แน่ใจว่าน้ำหนักมหาศาลของฐานพิมพ์จะถูกยกขึ้นด้วยความแม่นยำทางคณิตศาสตร์ กำจัดปัญหาการติดขัดของระบบเฟืองขบ (rack-and-pinion) ไปเลย
- อาร์เรย์ลอจิกขับสเต็ปเปอร์แบบกระจายตัว: เราใช้ไดรเวอร์สเต็ปเปอร์เกรดอุตสาหกรรมภายนอก แทนที่จะใช้โมดูลบนบอร์ดที่เปราะบาง (เช่น A4988/DRV8825) งานวิเคราะห์ (Forensics) เกี่ยวข้องกับการวัด "การวิเคราะห์สัญญาณลดทอน (Signal-Degradation Analytics)"; Mega 2560 จะส่งสัญญาณลอจิกสแควร์เวฟ 5V แยกกันสำหรับ
- การแยกโหลดแรงดันสูงและการวิเคราะห์ความร้อน:
- ภูมิประเทศแหล่งจ่ายไฟหลายทาง (Multi-Rail Power Topography): แบ่งระบบออกเป็นโดเมนที่แยกจากกันชัดเจน: 5V สำหรับลอจิก, ไฟสำหรับสเต็ปเปอร์ 1-4, และไฟสำหรับฮีตเตอร์หัวฉีด งานวิเคราะห์เน้นที่ "การหลีกเลี่ยงการกระเพื่อมของกราวด์ชั่วขณะ (Transient Ground-Bounce Avoidance)" โดยใช้สายเมนส์เกจใหญ่และฟิลเตอร์สาย RC เพื่อให้แน่ใจว่าการกินกระแสมหาศาลจากฮีตเตอร์คาร์ทริดจ์ 40W+ และมอเตอร์ NEMA ขนาดใหญ่ จะไม่ทำให้เกิดภาวะไฟตก (brown-out) แบบหายนะบนชิป ATmega2560 ของ Mega
- การวิเคราะห์ความร้อนหัวฉีดและ PID: จัดการโหนด M15 (องค์ประกอบให้ความร้อน) และ M18 (เทอร์มิสเตอร์) งานวิเคราะห์เน้นที่ "การปรับเทียบสัดส่วน-อินทิกรัล-อนุพันธ์ (PID Calibration)"; โดยแมปค่าแรงดันตกคร่อมเทอร์มิสเตอร์จากอนาล็อกเป็นดิจิตอล เพื่อควบคุมการสวิตช์ PWM ความถี่สูงของ Power-MOSFET ตัวใหญ่ รักษามวลความร้อนที่ 200°C+ โดยมีค่าผันแปรน้อยกว่าหนึ่งองศา
ดาวน์โหลดคู่มือฉบับเต็ม
ดาวน์โหลดคู่มือ PDF
ดาวน์โหลดรายการชิ้นส่วน
ดาวน์โหลดไฟล์ GERBER ต้นฉบับฟรี
สำหรับพิมพ์แผงวงจรคอนโทรลเลอร์ imaginbot 3D
ดาวน์โหลดไฟล์ Gerber เพื่อประกอบวงจร
แผงวงจรคอนโทรลเลอร์

ไฟเลี้ยง DC
ใช้สาย 6 เส้น ต่อจากขั้วต่อ POWER SUPPLY บนแผงคอนโทรลเลอร์ ไปยังขั้วต่อ POWER SUPPLY บนแผงไฟเลี้ยง
หรือจะใช้สายคู่ 3 คู่แทนก็ได้นะจ๊ะ



USB
ต่อสาย USB ทั่วไป เข้ากับพอร์ต USB ของ Arduino ได้เลยจ้า

ขั้วต่อสเต็ปไดรเวอร์
(ขั้วต่อจาก M1 ถึง M7)
ใช้สาย 4 เส้นสำหรับสัญญาณตามนี้เลย:
ขั้วต่อ Y1 (M1) และ Y2 (M2): สายขับมอเตอร์ 2 ตัวบนแกน Y
ขั้วต่อ Z1 (M3), Z2 (M4), Z3 (M5), Z4 (M6): สายขับมอเตอร์ 4 ตัวบนแกน Z
ขั้วต่อ X1 (M7): สายขับมอเตอร์บนแกน X

เชื่อมสายตามตารางสีนี้ อย่าให้สลับนะตัวดี!
สกรีนบนแผงวงจร --- สีสาย
5V ---------------------- แดง
PUL --------------------- เขียว
DIR --------------------- เหลือง
EN ---------------------- น้ำเงิน
ขั้วต่อพวกนี้สำหรับไดรเวอร์แต่ละตัว ใช้สายขนาด 0.5 ตร.มม. ได้สบายๆ
แนะนำว่า อย่าบิดสายทั้ง 4 เส้นสำหรับไดรเวอร์แต่ละตัวให้เป็นเกลียวรวมกันนะ ห้ามช็อตนะตัวนี้!
ความสามารถในการขับมอเตอร์แต่ละแกน แสดงตามตารางนี้:
แกน-ขั้วต่อ - จำนวนไดรเวอร์ที่ขับได้
X --------- M7 -------------- 1 ไดรเวอร์
Y ------- M1, M2 ----------- 2 ไดรเวอร์
Z ---- M3, M4, M5, M6 ----- 4 ไดรเวอร์

วิศวกรรมและการลงมือทำ (Engineering & Implementation)
โครงสร้างฮาร์ดแวร์และความสวยงามของอินเทอร์เฟซ (Hardware-Topology & Interface Aesthetics):
- เมทริกซ์สวิตช์จำกัดการเคลื่อนที่ (End-Stop Matrix) (M9-M14): การตั้งค่าจุดอ้างอิงศูนย์สัมบูรณ์ (absolute zero-coordinates) งานสืบสวนของเรารวมถึงการวัด "การดีบาวซ์สัญญาณอินเทอร์รัพต์จากฮาร์ดแวร์ (Hardware-Interrupt Debouncing)" เพื่อให้แน่ใจว่าสวิตช์ทางกายภาพจะจำกัดการเคลื่อนที่เกินพิกัดที่อาจสร้างหายนะได้ โดยไม่มีความล่าช้าในการประมวลผลเลย (zero computational latency) เรียกว่าห้ามช็อตนะตัวนี้!
- การวินิจฉัย HMI EXP1/EXP2: การติดตั้งระบบย่อยจอ LCD ขนาด 12864 และโรตารี่เอ็นโค้ดเดอร์ผ่านสายริบบอน 10 พินแบบคู่ งานสืบสวนเน้นที่ "ความสมบูรณ์ของสัญญาณ SPI ความเร็วสูง (High-Speed SPI Integrity)" โดยรักษาความยาวสายสูงสุดไว้ที่ 25 ซม. เพื่อป้องกันการเสื่อมสภาพของข้อมูลแรสเตอร์ความถี่สูง จำไว้เลย เกินนี้ภาพอาจจะเพี้ยน!
ตรรกะระบบและวิธีการทำงานเชิงฮิวริสติก (System-Logic & Workflow Heuristics):
- การนำไปใช้งานนี้แสดงให้เห็นถึง "สุนทรียภาพระดับอุตสาหกรรม (Industrial-Scale Aesthetic)" พิสูจน์ให้เห็นว่าโครงสร้างไมโครคอนโทรลเลอร์โอเพ่นซอร์สสามารถขยายขนาดไปสู่เรขาคณิตการผลิตหนักๆ ได้อย่างสมบูรณ์แบบ เมื่อจับคู่กับอิเล็กทรอนิกส์กำลังที่ถูกออกแบบและแยกส่วนอย่างเคร่งครัด เรียกว่าจัดไปวัยรุ่น!
สวิตช์จำกัดการเคลื่อนที่ (ลิมิตสวิตช์ / END-STOP)
ใช้สายไฟสองเส้นต่อลิมิตสวิตช์ตามตำแหน่งดังนี้:
ขั้วต่อ X-MIN (M9) และ X-MAX (M10): สวิตช์จำกัดการเคลื่อนที่แกน X ตำแหน่งต่ำสุดและสูงสุด
ขั้วต่อ Y-MIN (M11) และ Y-MAX (M12): สวิตช์จำกัดการเคลื่อนที่แกน Y ตำแหน่งต่ำสุดและสูงสุด
ขั้วต่อ Z-MIN (M13) และ Z-MAX (M14): สวิตช์จำกัดการเคลื่อนที่แกน Z ตำแหน่งต่ำสุดและสูงสุด


กลุ่มหัวฉีด (Extruder)
กลุ่มหัวฉีดประกอบด้วยสายหลายเส้น:
ขั้วต่อ EXTRUDER (M8): สายสเต็ปเปอร์มอเตอร์ 4 เส้นสำหรับหัวฉีด
ขั้วต่อ RISC (M15): สายไฟ 2 เส้นสำหรับองค์ประกอบให้ความร้อน (ฮีตเตอร์)
ขั้วต่อ TERM (M18): สายไฟ 2 เส้นสำหรับเทอร์มิสเตอร์
ขั้วต่อ VENT (M16): สายไฟ 2 เส้นสำหรับพัดลม (ระวังขั้วบวก-ลวด้วยนะ!)

มอเตอร์หัวฉีด (ขั้วต่อ M8)
ขั้วต่อนี้ส่งพัลส์คำสั่งไปยังสเต็ปเปอร์มอเตอร์ของหัวฉีด
เนื่องจากต้องรองรับกระแสประมาณ 1 A ต่อพิน ควรใช้สายที่มีพื้นที่หน้าตัดไม่น้อยกว่า 1 ตร.มม. (18 AWG) ในการเดินสาย
ถ้าความยาวสายเกิน 1 เมตร จำเป็นต้องเพิ่มพื้นที่หน้าตัดเป็น 1.2 ตร.มม. ไม่งั้นสายอาจร้อนได้ สู้งานนะน้อง!


องค์ประกอบให้ความร้อน (ฮีตเตอร์)
(ขั้วต่อ M15)
ขั้วต่อพอร์ตจ่ายไฟ 12 VDC ไปยังความต้านทานให้ความร้อน (ฮีตเตอร์) ของหัวฉีด
สายไฟต้องมีพื้นที่หน้าตัดอย่างน้อย 1.5 ตร.มม. (อันนี้กินกระแสสูง อย่าใช้สายเล็กนะ!)
สถานะการทำงานจะแสดงด้วยไฟ LED สีแดง

เทอร์มิสเตอร์ (M18 Connector)
ตัวคอนเนกเตอร์นี้เอาไว้ต่อสายจากเทอร์มิสเตอร์ที่อยู่ข้างในเอ็กซ์ทรูดเดอร์นั่นแหละ
สำคัญมากๆ นะ ถ้าสายที่มาจากเทอร์มิสเตอร์ตัวนั้นมันต่อตรงกับส่วนที่เป็นโลหะ (ตัวเอ็กซ์ทรูดเดอร์) ต้องแน่ใจว่าเสียบเข้าที่ขาขวา (มองจากด้านหน้า)
ขาขวามันคือกราวด์ ดูในรูปวาดทั่วไปจะเห็นว่ามันมีแผ่นฐานเป็นสี่เหลี่ยมจัตุรัส
ถ้ายังไม่แน่ใจ ลองใช้มัลติมิเตอร์วัดเช็คดูก็ได้ ว่าสายเส้นไหนที่ต่อตรงกับตัวโลหะของเอ็กซ์ทรูดเดอร์จริงๆ ถ้าเจอแล้วก็จัดการเสียบให้ถูกขาตามที่บอกไปเลย

พัดลมเอ็กซ์ทรูดเดอร์ (M16 Connector)
คอนเนกเตอร์ตัวนี้เอาไว้ควบคุมพัดลมบนเอ็กซ์ทรูดเดอร์ผ่านซอฟต์แวร์
ใช้สายขนาดหน้าตัด 0.5 mm2 ก็พอแล้ว
เวลาพัดลมทำงาน ไฟ LED สีเขียวจะติดเป็นสัญญาณบอกเรา

เซอร์วิส (M17 Connector)
ตรงนี้จ่ายไฟ DC 12V ให้เราใช้ได้นะ แต่ต้องระวัง กระแสรวมที่ดึงได้สูงสุดไม่เกิน 0.4A
ขั้วบวก (+) จะมีเครื่องหมาย "+" ปรากฏอยู่บนลายสกรีนของบอร์ด
เทอร์มินัลนี้เอาไว้ต่อพัดลมที่เราไม่อยากให้ซอฟต์แวร์มาควบคุม (เปิดตูมตลอดเวลา) หรือจะเอาไปใช้กับพาวเวอร์ซัพพลายภายนอกก็ได้

จอแสดงผลและ SD Player (EXP1 และ EXP2)
คอนเนกเตอร์สองตัวนี้มีหน้าที่เชื่อมต่อจอแสดงผลและเอ็นโค้ดเดอร์เข้ากับเมนบอร์ด
ต่อจอ 12864 ด้วยสายแพ 10 เส้นของมัน
เสียบสายแพเส้นแรกเข้ากับคอนเนกเตอร์ EXP1 และเส้นที่สองเข้ากับ EXP2
ระวังทิศทางให้ดีทั้งสองด้านนะ ดูที่เดือยบนคอนเนกเตอร์ของสายแพ ต้องหันเข้าหาช่องบนคอนเนกเตอร์ของบอร์ด

คำเตือน! ฟังดีๆ นะน้อง
ถ้าเสียบสลับขั้วกัน (ซึ่งเกิดขึ้นได้ง่ายมาก) อาจทำให้อุปกรณ์พังได้แบบไม่สามารถกู้คืนได้เลย
และอีกอย่าง ความยาวของสายแพไม่ควรเกิน 25 ซม.

เพาเวอร์ซัพพลายการ์ด
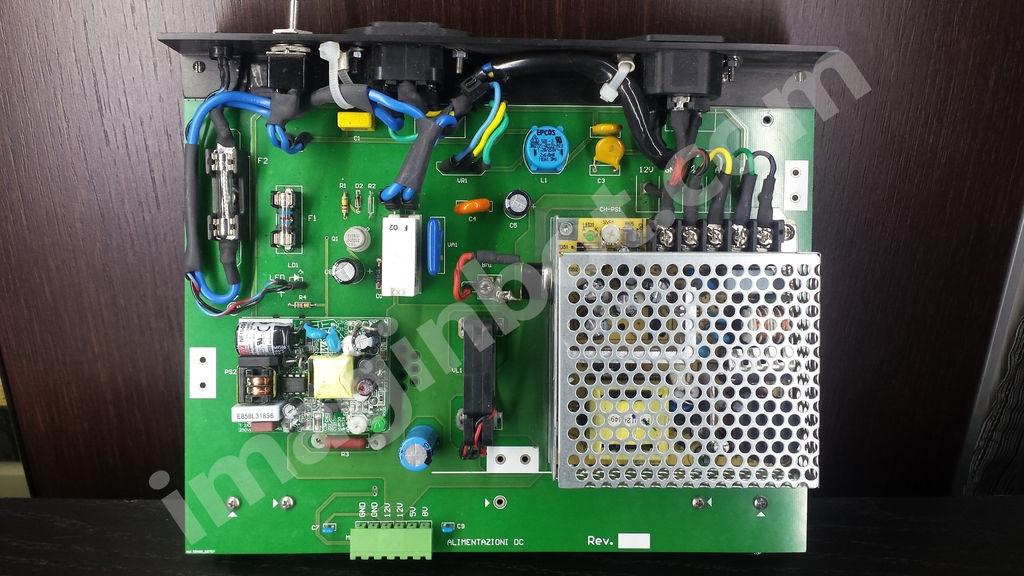

คอนเนกเตอร์เพาเวอร์ซัพพลาย
INPUT จากไฟบ้าน (AC)
อยู่ที่แผงด้านหน้า เอาไว้จ่ายไฟ AC ให้ทั้งบอร์ดภายนอกและเพาเวอร์ซัพพลาย
สามารถเดินสายด้วยคอนเนกเตอร์ตัวเมียแบบ IEC ได้ ซึ่งหาซื้อได้ทั่วไป
สายไฟต้องมีหน้าตัดไม่น้อยกว่า 1.2 mm2 และต้องมีสายดินด้วย
ใช้สายไฟคอมตั้งโต๊ะทั่วไปที่ใช้กับไฟ 220VAC ก็ได้
ก่อนจะต่อสายไฟ ต้องแน่ใจว่าสวิตช์หลักอยู่ในตำแหน่ง OFF และการ์ดอยู่ในกล่องหรือภาชนะที่เป็นฉนวนเพื่อความปลอดภัยด้วยนะ อย่าประมาท



เอาต์พุตไฟตรง (DC Output) สำหรับเพาเวอร์ซัพพลาย
การ์ดคอนโทรลเลอร์ (Controller Card)
ใช้สายที่แนะนำในตารางท้ายเอกสารนี้ ในการเชื่อมต่อบอร์ดสองตัวเข้าด้วยกันนะน้อง (Controller กับ Power Supply) อย่าลืมเช็คให้ดี ไม่งั้นไฟอาจจะไม่เข้า จัดไปวัยรุ่น!



ฟิลเตอร์ RC (RC Filters)
เชื่อมต่ออินพุต 220VAC ของฟิลเตอร์ RC สองตัว เข้ากับคอนเนคเตอร์บนบอร์ดเพาเวอร์ซัพพลายเอาต์พุต 220VAC ด้วยสายไฟทั่วไป (common monitor cable) ตัวเดียวกันเลย
แต่ละสายต้องมีตัวนำสามเส้นนะจ๊ะ:
เฟส (สีน้ำตาล)
นิวทรัล (สีน้ำเงิน)
กราวด์ (สีเขียว-เหลือง)
อินพุตของฟิลเตอร์ 1 กับฟิลเตอร์ 2 สามารถต่อแบบขนาน (parallel) กันได้เลย สบายๆ

ข้อมูล Frontmatter ดั้งเดิม
apps: - "Arduino IDE (Firmware Compilation)" - "SD Player/Encoder Display (HMI Telemetry Dashboard)" author: "imaginbot" category: "Motors & Robotics" components: - "1x Custom Imaginbot PCB Shield (High-Density Routing Substrate)" - "1x Arduino Mega 2560 (Primary Interpolation-Compute Hub)" - "Multiple External Stepper Drivers (High-Voltage Actuator Nodes)" - "Multiple 12V/24V Industrial Power Supplies (Independent Rail-Topology)" - "NEMA Stepper Motors [X, Y, Z Axis Array] (Kinematic Endpoints)" description: "A profound industrial-level CNC processing engine featuring Mega 2560 G-Code parsing, hyper-scale stepper motor vectoring (M1-M7), and rigorous high-current load-isolation." difficulty: "Intermediate" documentationLinks: [] downloadableFiles: - "https://projects.arduinocontent.cc/44634a2e-d8a9-4cf1-aea2-fe1f3cd99bee.zip" - "https://projects.arduinocontent.cc/44634a2e-d8a9-4cf1-aea2-fe1f3cd99bee.zip" encryptedPayload: "U2FsdGVkX194KPaJeP/iBc0OaSsb5fuTSiF3r80LCsVX+awSHfqbeCQ+zS+zCR55kVnz903PTOU4ApasIJ8+hYl2Xviaeta0M/27m7gvFnM=" heroImage: "https://cdn.jsdelivr.net/gh/bigboxthailand/arduino-assets@main/images/projects/imaginbot-controller-for-1-cubic-meter-3d-printer-c83b56_cover.jpg" lang: "en" likes: 1325 passwordHash: "1f0229c30167a2c15b96fbd5efb063d1d8118241cb00568774295869e989ed79" price: 2450 seoDescription: "Imaginbot Controller for 1 Cubic Meter 3D Printer. Designed to control large-scale stepper motors for high-volume 3D printing." tags: - "hyper-scale-cnc-orchestration" - "multi-axis-stepper-kinematics" - "high-current-load-isolation" - "g-code-parsing-forensics" - "arduino-mega-2560" title: "Imaginbot-Core: Asynchronous CNC Orchestration & High-Current Kinematic Diagnostics" tools: - "Marlin/RepRap Firmware (G-Code Spatial Analytics)" - "End-Stop Threshold Validation (Collision-Mitigation Heuristics)" videoLinks: - "https://www.youtube.com/embed/UdN6qVLs8tQ" views: 1325