การวัดด้วยเสียง: คู่มือ HC-SR04
โปรเจกต์ Ultrasonic Sensor Interfacing เป็นทักษะพื้นฐานสำหรับนักสร้างทุกคน มันคือ "Hello World" ของการผสานรวมเซ็นเซอร์สำหรับหุ่นยนต์ ช่วยให้ไมโครคอนโทรลเลอร์ของคุณรับรู้ความลึกและหยุดก่อนที่จะชนกำแพง
ฟิสิกส์การระบุตำแหน่งด้วยเสียงสะท้อน
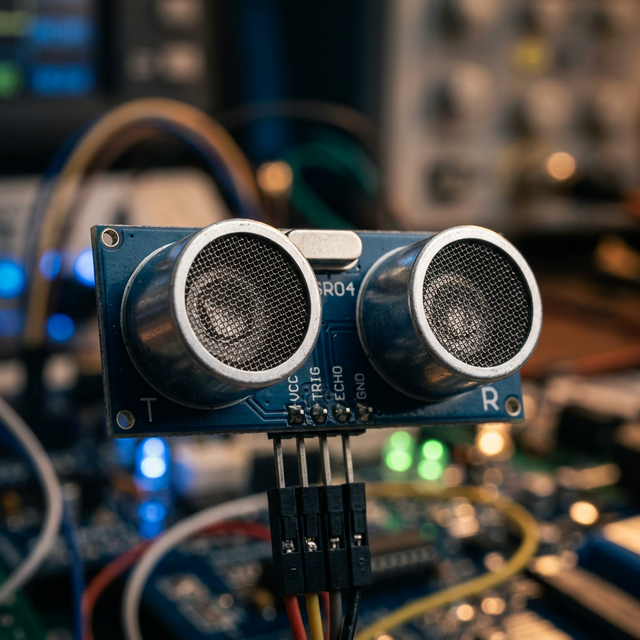
HC-SR04 เลียนแบบการระบุตำแหน่งด้วยเสียงสะท้อนของค้างคาว มันมีกระบอกสีเงินขนาดใหญ่สองอัน:
- การทริกเกอร์: Arduino ส่งพัลส์ HIGH ขนาด 10 ไมโครวินาทีไปยังขา
Trigของเซ็นเซอร์ กระบอกด้านซ้าย (Speaker) จะปล่อยคลื่นเสียงอัลตราโซนิกความถี่ 40 kHz ออกมา (มนุษย์ไม่ได้ยิน) - การรอ: ขา
Echoจะเปลี่ยนเป็น HIGH ทันที คลื่นเสียงเดินทางผ่านอากาศจนกระทั่งกระทบวัตถุแข็งและสะท้อนกลับมา - การรับ: กระบอกด้านขวา (Microphone) จะได้ยินเสียงสะท้อน ขา
Echoจะเปลี่ยนเป็น LOW ทันที
คณิตศาสตร์ที่สำคัญ
Arduino ใช้ฟังก์ชัน pulseIn(echoPin, HIGH) เพื่อวัดว่าขา คงค่า HIGH เป็นเวลากี่ไมโครวินาทีอย่างแม่นยำ หากผลลัพธ์คือ 1160 ไมโครวินาที:
- เสียงเดินทางด้วยความเร็ว 340 เมตรต่อวินาที (หรือ 0.034 เซนติเมตรต่อไมโครวินาที)
- ระยะทาง = (เวลา * ความเร็ว) / 2 (เนื่องจากเสียงเดินทางไป และ กลับ)
Distance = (1160 * 0.034) / 2 = 19.72 centimeters!
การเชื่อมต่อฮาร์ดแวร์
- Arduino Uno/Nano.
- HC-SR04 Module.
- สาย Jumper 4 เส้น (VCC ไป 5V, GND ไป GND และขา Digital สองขา).
ด้วยการแสดงผลตัวเลขสุดท้ายนี้ไปยัง Serial Monitor คุณก็จะได้เครื่องวัดระยะแบบดิจิทัลที่ใช้งานได้ทันที