Kayak GPS Navigation

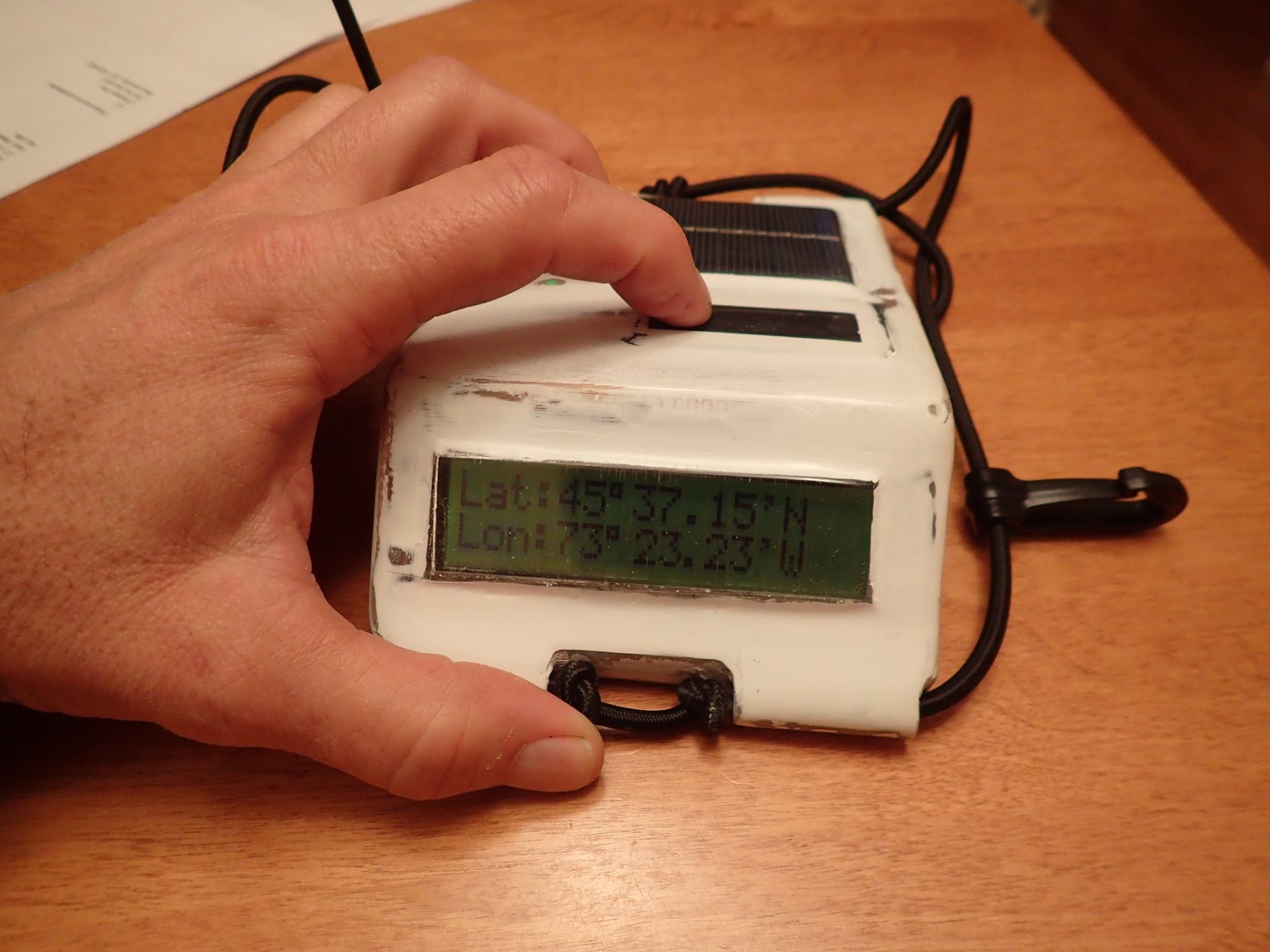




ผมสร้าง GPS นี้สำหรับเรือคายัคของผม ผมต้องการให้มันแข็งแรงทนทานพอที่จะติดอยู่กับเรือคายัคได้อย่างถาวร (ในสภาพทะเล) และสามารถทำงานได้อย่างต่อเนื่องสำหรับการเดินทางด้วยเรือคายัคในทะเลระยะยาว
-GPS ใช้พลังงานจากโซลาร์เซลล์เท่านั้น และสามารถทำงานได้ 1-2 วันโดยไม่ต้องมีแสงแดด หากจำเป็น ด้วยแบตเตอรี่ lithium-ion ในตัว (หากแบตเตอรี่เต็ม)
-หน้าจอสามารถอ่านได้ในที่แสงแดดจ้าหรือในเวลากลางคืนด้วยไฟ back light LED ในที่แสงแดดจ้า ไฟ back light LED จะถูกปิดเพื่อลดการใช้พลังงาน
-กันน้ำ, ปิดผนึกด้วย epoxy
-นาฬิกาน้ำขึ้นน้ำลงอิงจากการหมุนของดวงจันทร์ 12 ชั่วโมง 25 นาที 14 วินาที ชั่วโมงที่เหลือก่อนน้ำขึ้นหรือน้ำลงจะแสดงเป็นตัวนับถอยหลังจาก 5 ถึง 1
-GPS ไม่มีแผนที่ในตัว และควรใช้ร่วมกับแผนที่กระดาษสำหรับการวางแผนเส้นทาง หรือสามารถใช้เพียงเพื่อดูความเร็ว, เวลา และ odometer เหมือนแผงหน้าปัด
-ข้อมูล GPS ที่มี: เวลา, ละติจูดและลองจิจูด, ความเร็ว, นาฬิกาน้ำขึ้นน้ำลง, เข็มทิศ Azimuth, Azimuth Returns/ระยะทาง และ Odometer,
-การแสดงผลโหมด Pro; แสดงความเร็ว, เวลา, เข็มทิศ Azimuth, และเลือกแสดง Azimuth/ระยะทาง, นาฬิกาน้ำขึ้นน้ำลง และ Odometer
-การแสดงผลโหมด Dashboard; แสดงความเร็ว, odometer, เวลา ด้วยตัวอักษรขนาดใหญ่
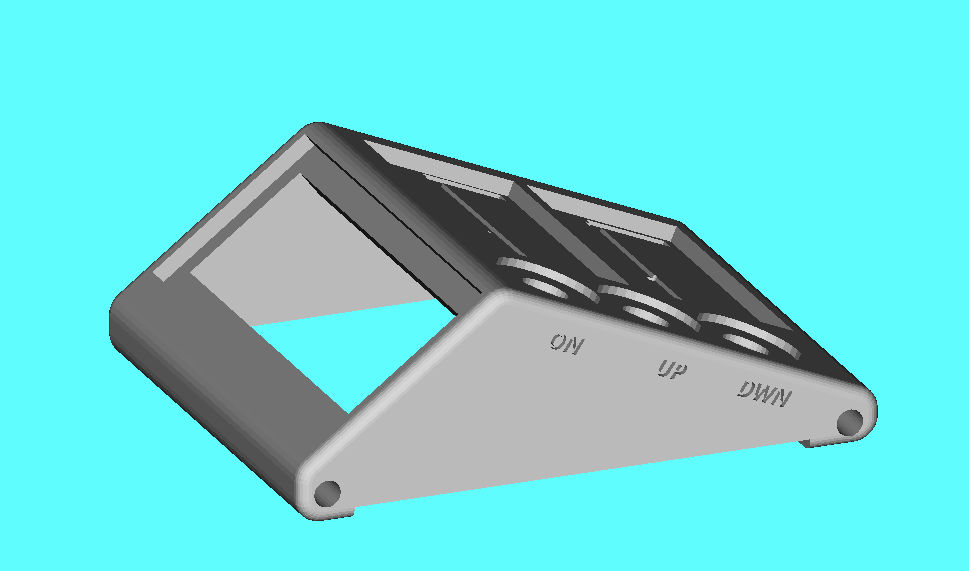
-ควบคุมด้วยปุ่มกด 4 ปุ่ม (select, Up, Down และ Power ON)
-การเปิด/ปิดเครื่องถูกควบคุมโดย MCU และ MCU สามารถปิดเครื่องได้เองหากแรงดันแบตเตอรี่ต่ำเกินไป (เพื่อป้องกันแบตเตอรี่)
-โหมดประหยัดพลังงาน, โมดูล GPS จะเข้าสู่โหมด Sleeping เป็นเวลา 10 วินาที และ Hot Start เพื่อรับข้อมูล จากนั้นกลับสู่โหมด Sleeping...
รุ่นถัดไปจะใช้ Arduino Nano pro, โมดูล GPS และจอ LCD ที่ 3.3 โวลต์ ซึ่งมีประสิทธิภาพมากขึ้นเมื่อใช้แบตเตอรี่ 3.7 โวลต์ ควบคุมด้วยปุ่มกดสามปุ่ม (select/PowerON, Up และ Down) มันจะเล็กลง, มีการออกแบบกล่องที่ดีขึ้น, มีตัวเลือกใหม่คือไฟกะพริบสำหรับการนำทาง (สีแดงและสีเขียว) อาจมี buzzer ในตัวสำหรับนาฬิกาปลุก, ข้อมูลอุณหภูมิ... ผมอาจจะต้องใช้ Mem เพิ่มขึ้น หรือต้องการความช่วยเหลือในการ optimize code
ขออภัย ภาษาอังกฤษไม่ใช่ภาษาแม่ของผม :(
รายละเอียดทางเทคนิคเพิ่มเติม
ศูนย์กลางข้อมูลเชิงพื้นที่ทางทะเลแบบกันน้ำ
โปรเจกต์นี้เป็นระบบนำทาง GPS ที่แข็งแรงทนทานและมีความแม่นยำสูง ออกแบบมาโดยเฉพาะสำหรับความท้าทายของการพายเรือคายัคและการพายในที่โล่ง
- NMEA Sentence Parsing Engine: Arduino เชื่อมต่อกับโมดูล GPS ที่มีความไวสูง (เช่น NEO-6M) เฟิร์มแวร์ใช้ไลบรารี
TinyGPS++เพื่อถอดรหัสแพ็คเก็ต NMEA ดิบ และแยก Latitude, Longitude, และ Kurs (ทิศทาง) แบบเรียลไทม์ - Sunlight-Readable OLED Dashboard: แสดงค่า Speed Over Ground (SOG) ปัจจุบัน, ทิศทางไปยังจุดหมายที่กำหนด, และระยะทางรวมที่เดินทางไปแล้ว เฟิร์มแวร์มีรูทีน "Reverse Inverse Kinematics" เพื่อคำนวณเส้นทางการพายที่มีประสิทธิภาพสูงสุดในการต้านกระแสน้ำ
ความน่าเชื่อถือ
- ตรวจสอบแล้วด้วย Arduino IDE: ปรับให้เหมาะสมเพื่อประสิทธิภาพที่เสถียร 100% ด้วย kernel การบันทึกข้อมูลที่แข็งแกร่งซึ่งจะบันทึกเส้นทางเรือคายัคทั้งหมดลงในการ์ด SD เพื่อการตรวจสอบในภายหลัง