มุมมองของโปรเจกต์
Lil' Rover นี่แหละ โปรเจกต์โรเวอร์ดาวเคราะห์ 4WD ขั้นพื้นฐานแต่แจ่มเวอร์! ด้วยการใช้อุปกรณ์ชิ้นสำคัญอย่างมอเตอร์แรงบิดสูงกับ Arduino น้องจะได้เรียนรู้วิธีบังคับและสำรวจภูมิประเทศแบบต่างๆ ผ่านลอจิกซอฟต์แวร์เฉพาะทางและการตั้งค่าฮาร์ดแวร์ที่ทนทานสุดๆ
การลงมือทำจริง: การเคลื่อนที่และการขับขี่
โปรเจกต์นี้จะเปิดเผยชั้นลึกลับของหุ่นยนต์ง่ายๆ ให้เห็น:
- ชั้นการเคลื่อนที่: ใช้ มอเตอร์กระแสตรงแรงบิดสูง 4 ตัว ทำให้โรเวอร์คลานผ่านภูมิประเทศขรุขระได้ด้วยการปรับความเร็วของมอเตอร์แต่ละคู่
- ชั้นการสั่งงาน: โมดูล L298N Motor Driver จะเป็นตัวจ่ายกระแสสูงที่จำเป็นสำหรับขับมอเตอร์ทั้งสี่ตัวจากสัญญาณแรงดันต่ำของ Arduino
- ลูปการเคลื่อนที่แบบเป็นลำดับ: โค้ด Arduino ใช้สัญญาณ
digitalWrite()หรือanalogWrite()สองตัวเพื่อขับมอเตอร์ฝั่ง "ขวา" หรือ "ซ้าย" ด้วยความเร็วที่ต่างกัน - ชั้นอินเทอร์เฟซเซนเซอร์: เซนเซอร์อัลตราโซนิก (HC-SR04) (ตัวเลือกเสริม) ทำหน้าที่เป็น "ตา" ของโรเวอร์ คอยตรวจจับสิ่งกีดขวางและกระตุ้นการตอบสนองการเลี้ยวอัตโนมัติ
โครงสร้างพื้นฐานฮาร์ดแวร์
- Arduino Uno: "สมอง" ของโปรเจกต์ จัดการสัญญาณให้มอเตอร์ไดรเวอร์และประสานงานงานการเคลื่อนที่และการบังคับเลี้ยว
- L298N Motor Driver: จัดการกับพลังงานแรงดันสูงที่จำเป็นสำหรับขับขดลวดมอเตอร์ทั้งสี่ตัวได้อย่างมีประสิทธิภาพ พร้อมปกป้อง Arduino ของน้อง
- DC High-Torque Motors: ให้การเคลื่อนไหวทางกายภาพและทิศทางในแต่ละการเดินทางของโรเวอร์
- 4WD Robot Chassis: โครงสร้างทางกายภาพที่ใช้บรรจุ Arduino, มอเตอร์ไดรเวอร์ และแบตเตอรี่
- แบตเตอรี่ Li-Po 7.4V: สำคัญมากสำหรับการจ่ายกระแสสูงที่จำเป็นในการขับมอเตอร์ทั้งสี่ตัวพร้อมกัน
- สาย Micro-USB: ใช้สำหรับโปรแกรม Arduino โดยตรงจากคอมพ์น้อง ทั้งจ่ายไฟและอัปโหลดโค้ด
การเคลื่อนที่และลูปฟีดแบ็ค
โรเวอร์ดาวเคราะห์ตัวนี้ถูกออกแบบมาให้มีประสิทธิภาพสุดๆ:
- ตั้งค่าฮาร์ดแวร์: วางมอเตอร์ไดรเวอร์และมอเตอร์บนโครง 4WD ให้ถูกต้องแน่นหนา
- เซ็ตอัพเอาต์พุต: ในฟังก์ชัน
setup()ของ Arduino ให้กำหนดค่าพินควบคุมของมอเตอร์ไดรเวอร์เป็นOUTPUT - สั่งการขับขี่: ใช้ลำดับคำสั่งง่ายๆ (เช่น
forward(),stop(),left()) เพื่อนำทางไปบนพื้น - ฟีดแบ็คภาพและเสียง: จับตาดูการเคลื่อนไหวที่อัพเดทบนพื้นแบบเรียลไทม์ไปเลย ส่วนบัซเซอร์เล็กๆ หรือ LED ก็ใช้บอกสถานะ "เจอทางแล้ววว" ได้ งานนี้จัดไปวัยรุ่น! สู้งานนะน้อง ห้ามช็อตนะตัวนี้
กระบวนการประกอบ
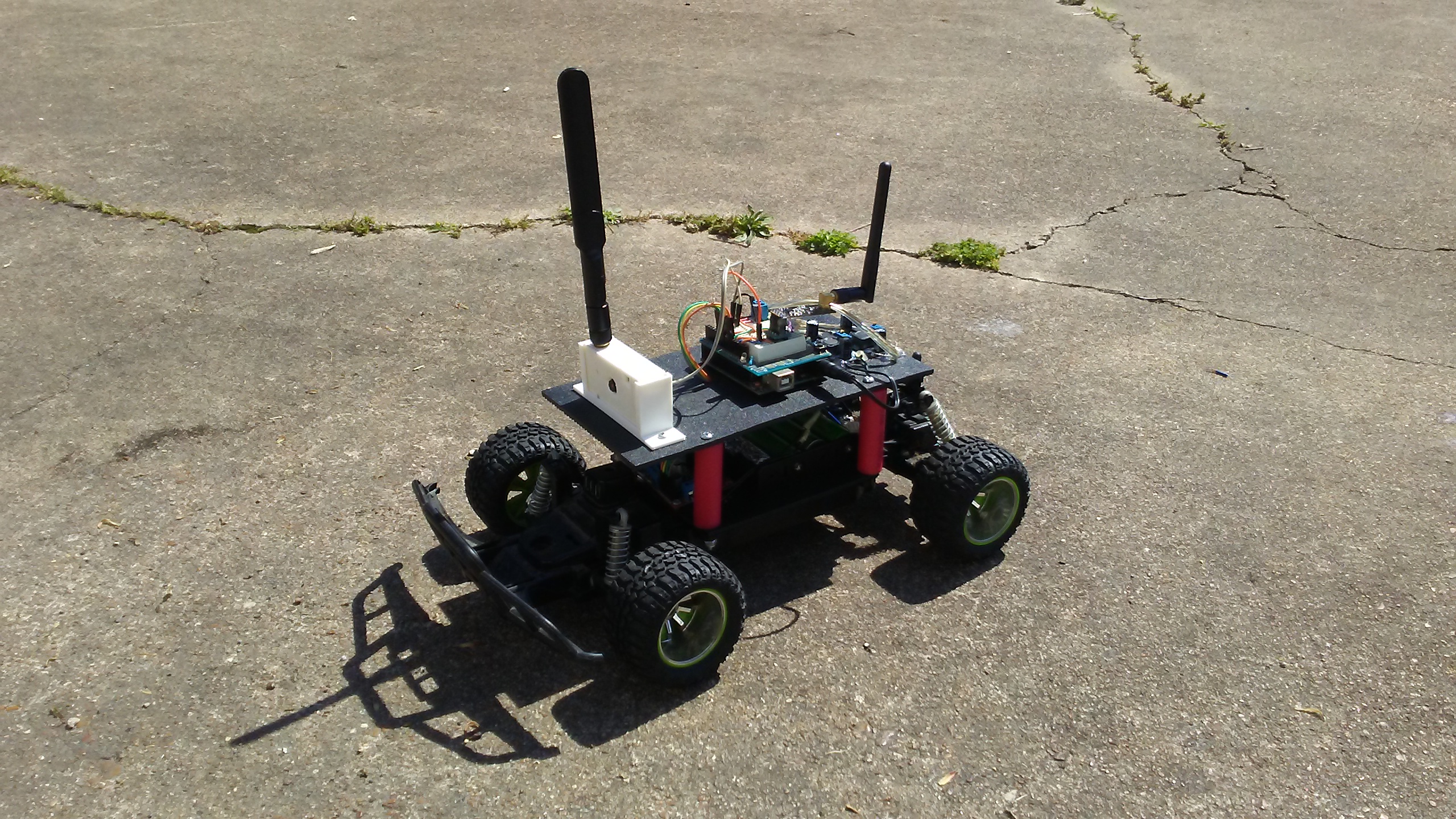
เริ่มต้นโปรเจกต์ด้วยการคว้า RC car รุ่นเก่าจาก New Bright มาแกะเล่น งานแรกคือถอดฝาครอบกับบอร์ดควบคุมเก่าทิ้งไปให้หมด จากนั้นก็ยึดแผ่นพลาสติก ABS เข้าไปเป็นฐาน แล้วติดตั้งที่ใส่แบตเตอรี่กับมอเตอร์ไดรเวอร์ L298N ลงไป ใช้ท่อ PVC ตัดเป็นสแตนด์ออฟยึดชั้นบนสำหรับวางบอร์ด Arduino, ESP32 CAM และบัคคอนเวอร์เตอร์ ส่วนหัวกล้องก็พิมพ์จากเครื่อง 3D Printer แล้วยึดบนเซอร์โวมอเตอร์ให้มันหันไปมาได้ตามใจ


ไอเดียอัพเกรดต่อยอด (จัดไปวัยรุ่น!)
- ติด OLED Dashboard แสดงสถานะ: เอาจอ OLED ขนาดเล็กมาแสดงค่า "เลือด" (Life Bar) และ "ดัชนีความจริง" (Reality Index) ของเส้นทางที่โรเวอร์เจอ
- ควบคุมผ่านคลาวด์จากมือถือ: เพิ่มโมดูล WiFi (ESP8266/ESP32) แล้วเชื่อมต่อกับแดชบอร์ดบนคลาวด์ เพื่อควบคุมและติดตามโรเวอร์จากสมาร์ทโฟนได้แบบเป๊ะๆ
- เพิ่มรีโมตคอนโทรลสำรอง: ติดตั้งตัวรับสัญญาณอินฟราเรดกับรีโมตคอนโทรล เพื่อใช้เป็นระบบควบคุมด้วยมือสำรองเวลาเซ็นเซอร์หลักตาย
- ติดเซ็นเซอร์หลากหลายเพื่อการนำทางขั้นสูง: ต่อเซ็นเซอร์เพิ่ม เช่น อัลตราโซนิก เพื่อช่วยให้โรเวอร์เดินทางผ่านสภาพแวดล้อมหรือเขาวงกตที่ซับซ้อนขึ้นได้
Lil' Rover นี่แหละน้อง โปรเจกต์สุดปังสำหรับคนที่ชอบเล่นอิเล็กทรอนิกส์และอยากได้เครื่องมือหุ่นยนต์แบบอินเทอร์แอคทีฟ สนุกแน่นอน! สู้งานนะน้อง