โปรเจคนี้มันคือการหาตำแหน่งเป๊ะๆ ของวัตถุในพื้นที่ที่เรากำหนดไว้ แล้วเอาโคออร์ดิเนตที่ได้ไปสั่งงานหุ่นยนต์ตัวอื่นต่อแบบสัดส่วนกัน
ไอเดียเจ๋งๆ แบบนี้พี่ไปหยิบยืมมาจากทัชแพดของแล็ปท็อปเลยน้อง วิธีคิดก็ง่ายๆ แบบว่า ทัชแพดมันรู้ตำแหน่งที่เราจิ้มใช่มะ? ระบบของเราก็ต้องรู้ตำแหน่งของนิ้วหรือวัตถุในพื้นที่แบบเดียวกัน
เซนเซอร์อัลตราโซนิคแต่ละตัวสามารถตรวจจับวัตถุที่วางอยู่ตรงหน้าแล้วบอกระยะทางมาได้ งานนี้เราใช้สองตัว วางทำมุม 90 องศากัน พอได้ระยะจากทั้งสองเซนเซอร์ ระบบเราก็จะทำงานเหมือนกระดาษกราฟเลย โดยให้เซนเซอร์แต่ละตัวเป็นแกน X กับ แกน Y ตามลำดับ แค่นี้ก็ได้ตำแหน่ง (x, y) ของวัตถุหรือนิ้วเราออกมาแล้ววว ง่ายชิป!
ลงลึกเรื่องเทคนิค: Triangulation และการแมปตำแหน่ง
มาดูกันว่างานชิ้นนี้มันซ่อนอะไรไว้บ้าง ตั้งแต่การรับรู้ไปจนถึงการโต้ตอบ:
- เลเยอร์ตรวจจับ: ใช้ HC-SR04 Sensors สองตัวเป็นดวงตาความละเอียดสูง คอยวัดค่า X และ Y ผ่านการจับเวลาไมโครวินาทีของคลื่นเสียง
- เลเยอร์แปลงสัญญาณ: ระบบใช้ขา Digital 4 ขา (Triggers/Echoes) เพื่อรับพัลส์ PWM ความเร็วสูง สำหรับงานตรวจจับที่ต้องแม่นยำ
- ตรรกะการประมวลผล: โค้ด Arduino ใช้กลยุทธ์ "coordinate-dispatch" คือแปลค่าระยะจากอัลตราโซนิคแล้วแมปมันไปเป็นตำแหน่งบนหน้าจอหรือพื้นที่ทำงาน (เช่น 0-1920, 0-1080) เพื่อให้ควบคุมแบบเป็นสัดส่วนได้
- ลูปสื่อสาร: ตอนตั้งค่าเริ่มต้น (Calibration) ระบบจะส่งรหัสตำแหน่งออกมาเป็นจังหวะๆ ทาง Serial Monitor ให้เราตรวจสอบสถานะงาน
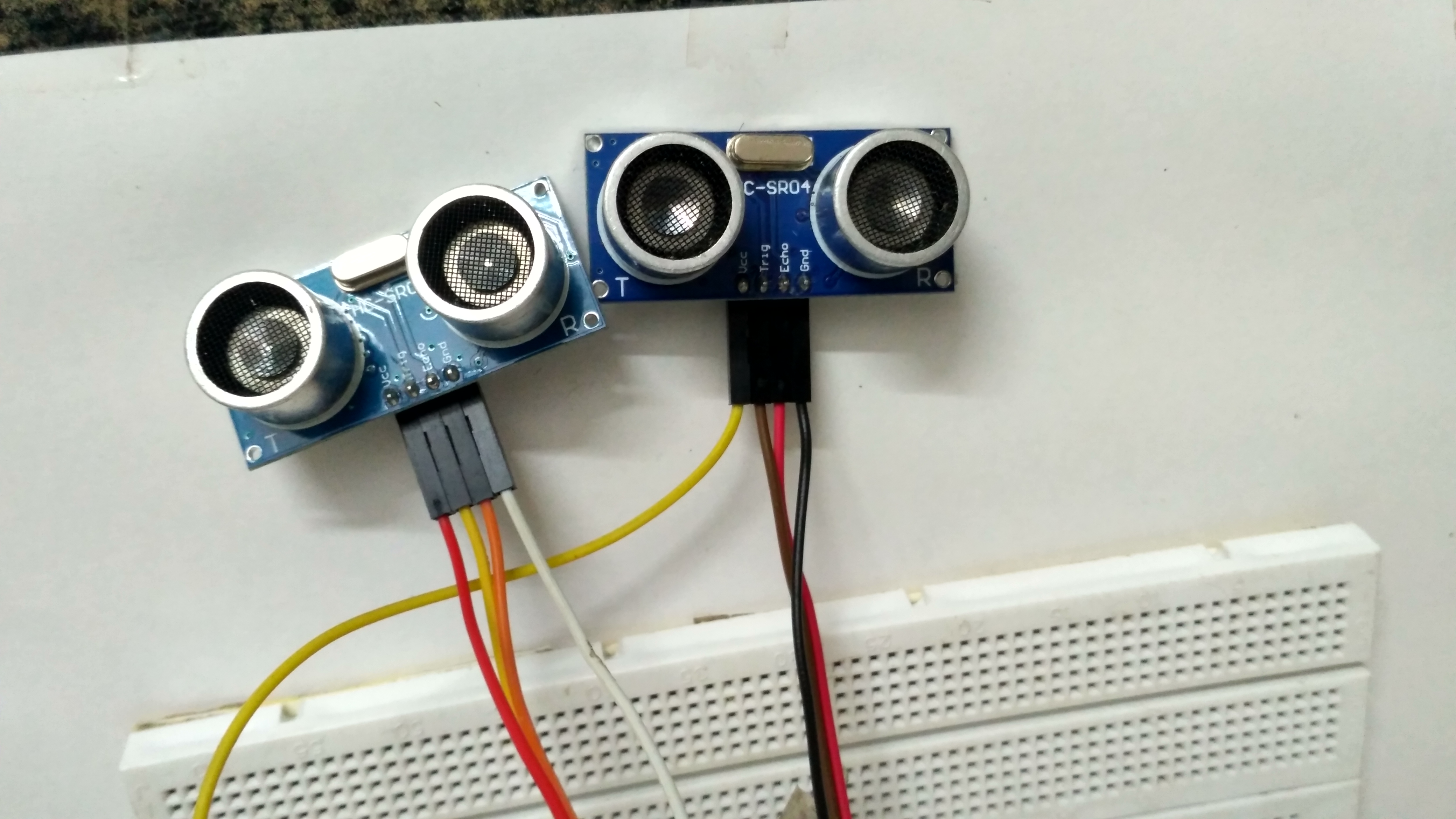
ต้องใช้เซนเซอร์อัลตราโซนิคสองตัวนะจ๊ะน้อง
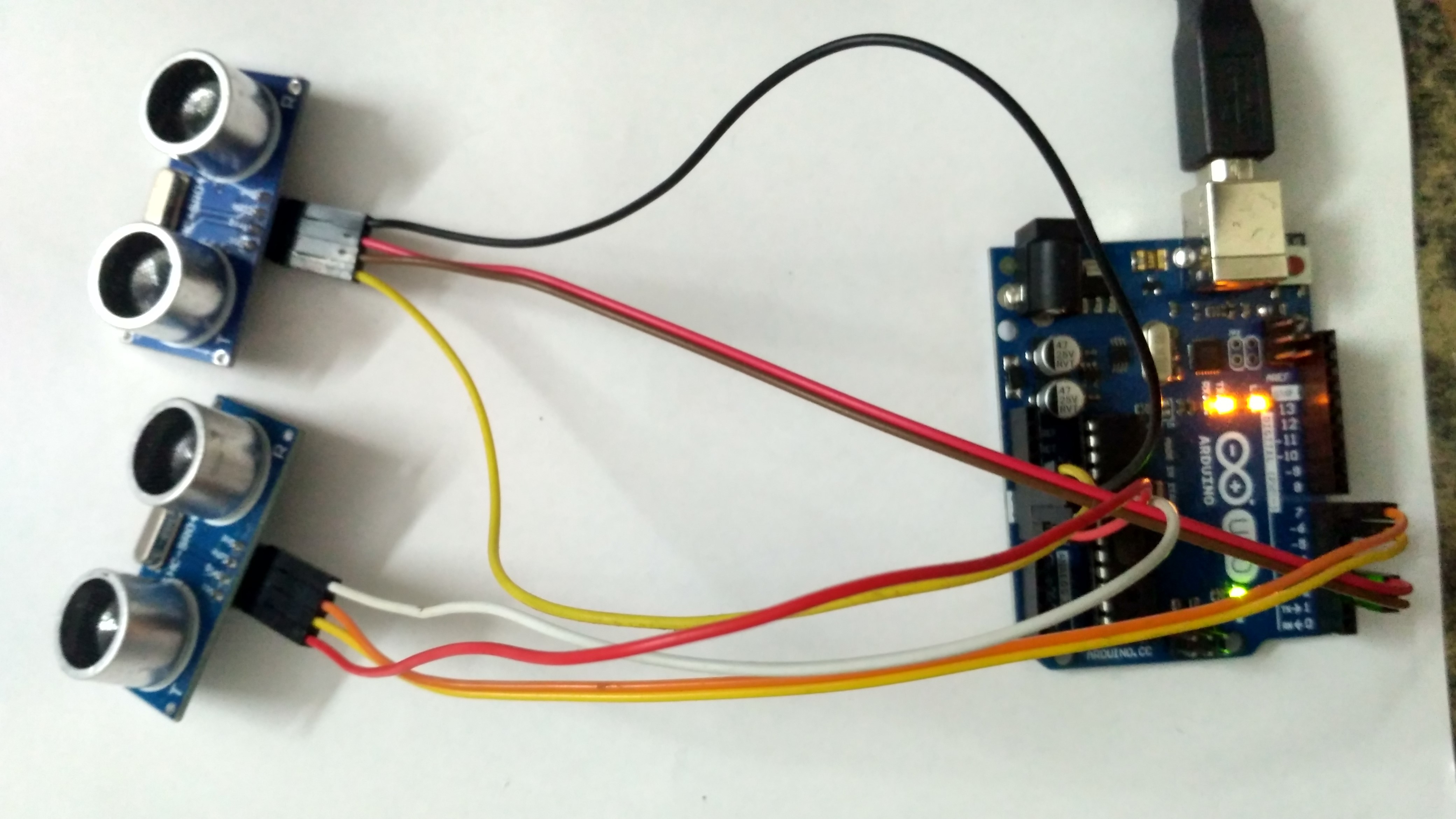
เซนเซอร์พวกนี้ต้องต่อเข้ากับ Arduino Uno ให้เรียบร้อย

เซนเซอร์ต้องหันทำมุม 90 องศากันนะ งานนี้เราติดมันไว้ในกล่องกระดาษ

เราใช้แบตเตอรี่เป็นวัตถุให้เซนเซอร์ตรวจจับ
สรุปผลคือเราได้ค่าตำแหน่งมาแล้ว! แต่มันอาจจะไม่เป๊ะเวอร์ เพราะเซนเซอร์พวกนี้ไม่ได้ออกแบบมาสำหรับงานนี้โดยตรง เอาเป็นว่าได้ค่ามาพอทำงานต่อได้ก็ใช้ได้แล้วว่ะ สู้งานนะน้อง!
ฮาร์ดแวร์ที่ต้องจัด (Hardware Infrastructure)
- Arduino Uno: ตัว "สมอง" ของโปรเจคนี้แหละ จัดการเรื่องการอ่านค่าจากเซนเซอร์หลายทิศทางและคำนวณพิกัดให้เรา
- HC-SR04 Sensors (x2): ทำหน้าที่เป็น "สายวัด" ที่ชัดเจนและแม่นยำสำหรับแต่ละจุดบนพื้นผิวแบบไม่สัมผัส
- Breadboard: ตัวช่วยให้ต่อวงจรอิเล็กทรอนิกส์แบบอินพุตได้สะดวก ต่อทุกชิ้นส่วนได้โดยไม่ต้องบัดกรี
- USB Cable: สำคัญมากสำหรับการอัพโหลดโค้ดลง Arduino และเป็นช่องทางส่งข้อมูลผ่านการสื่อสารแบบอนุกรม (Serial)
ขั้นตอนการทำงานของระบบ (System Operation Step-by-Step)
กระบวนการตรวจจับพิกัดออกแบบมาให้ทำงานได้อย่างมีประสิทธิภาพ:
- จัดพื้นที่ทำงาน (Initialize Workspace): ตั้งค่าเซนเซอร์ของคุณให้ถูกต้องภายในกรอบตรวจจับ โดยทำมุม 90 องศาตามที่เห็นในภาพด้านบน และต่อสายให้ถูกต้องกับขาของ Arduino
- ตั้งตรรกะการตรวจจับ (Setup Sensing Logic): ในสเก็ตช์ Arduino กำหนดช่วงการตรวจจับ (เช่น 2cm ถึง 30cm) ภายในฟังก์ชัน
setup() - ลูปทำงานแบบไม่หยุดพัก (Internal Dialogue Loop): ระบบจะทำการตรวจสอบเป็นระยะๆ อ่านค่าระยะทางจากเซนเซอร์ทั้งสอง และคำนวณพิกัด X, Y แบบเรียลไทม์
- บูรณาการข้อมูลย้อนกลับ (Data Feedback Integration): พิกัดที่คำนวณได้จะถูกส่งไปยัง Serial Monitor เพื่อให้เห็นตำแหน่งของวัตถุแบบสดๆ
แนวทางการพัฒนาต่อ (Future Expansion)
- เพิ่ม OLED Identity Dashboard: ต่อจอ OLED ขนาดเล็กไว้ข้างๆ เพื่อแสดงพิกัดสดๆ หรือสถานะของระบบ
- ซิงโครไนซ์เซนเซอร์หลายตัว (Multi-sensor Array Synchronization): ต่อเซนเซอร์เพิ่มเพื่อขยายพื้นที่ตรวจจับหรือเพิ่มความแม่นยำ
- สนับสนุนการลงทะเบียนผ่าน Cloud Interface: เพิ่มแดชบอร์ดเว็บเฉพาะทางผ่าน WiFi/BT เพื่อติดตามและบันทึกประวัติการอินพุตทั้งหมดอย่างแม่นยำ
- ปรับแต่งโปรไฟล์ความเร็วขั้นสูง (Advanced Velocity Profile Customization): เพิ่มลอจิกเพื่อคำนวณไม่ใช่แค่ตำแหน่ง แต่รวมถึงความเร็วและทิศทางของวัตถุที่เคลื่อนที่ด้วย
โปรเจค Ultrasonic Coordinate Finder นี้เหมาะสุดๆ สำหรับวัยรุ่นสายวิทย์-คณิตที่มองหาเครื่องมืออินพุตแบบโต้ตอบได้และน่าสนใจ! สู้งานนะน้อง!
[!IMPORTANT] เซนเซอร์อัลตราโซนิก ต้องการการ ชดเชยการแมปแบบสามเหลี่ยม (triangulation mapping offset) ที่แม่นยำในโค้ด อย่าลืมใส่ ฟลัก Fail-Safe ที่เหมาะสมในลูปด้วยนะ ถ้าเซนเซอร์โอเวอร์โหลดหรือสัญญาณหาย! ห้ามช็อตนะตัวนี้