จากเทสเซลเลชัน สู่สถาปัตยกรรมพลวัต!
เมื่อก่อนรุ่นพี่เคยแชร์โปรเจกต์ reTesselate ให้ชุมชนสุดเจ๋งนี้ดูแล้ว มันคือชุดโมดูลาร์ที่เปลี่ยนรูปได้ตามสภาพแวดล้อมรอบข้าง ใช้ Arduino เป็นตัวควบคุมและเซ็นเซอร์วัดสภาพแวดล้อมต่างๆ มาช่วยทำงาน
การศึกษาด้านการออกแบบเรขาคณิตและความสมมาตรมีอิทธิพลต่อโปรเจกต์นี้มาก และในวิดีโอด้านล่าง พี่อยากจะแสดงให้เห็นส่วนหนึ่งของขั้นตอนการทำ ส่วนแรกของวิดีโอแสดงกระบวนการสเก็ตช์ลวดลายที่สานกัน หลังจากนั้น เราก็นำลวดลายนี้ไปผลิตเป็นโมดูลาร์และประกอบเป็นแพทเทิร์นขึ้นมา เตรียมพบกันในงาน Human-Computer Interaction (HCI) conference ที่ Orlando ปี 2019 นะน้อง!
วิดีโอด้านล่างแสดงการออกแบบ การผลิต และการโปรแกรมของโครงสร้างที่ปรับเปลี่ยนรูปทรงได้
มุมมองของโปรเจกต์
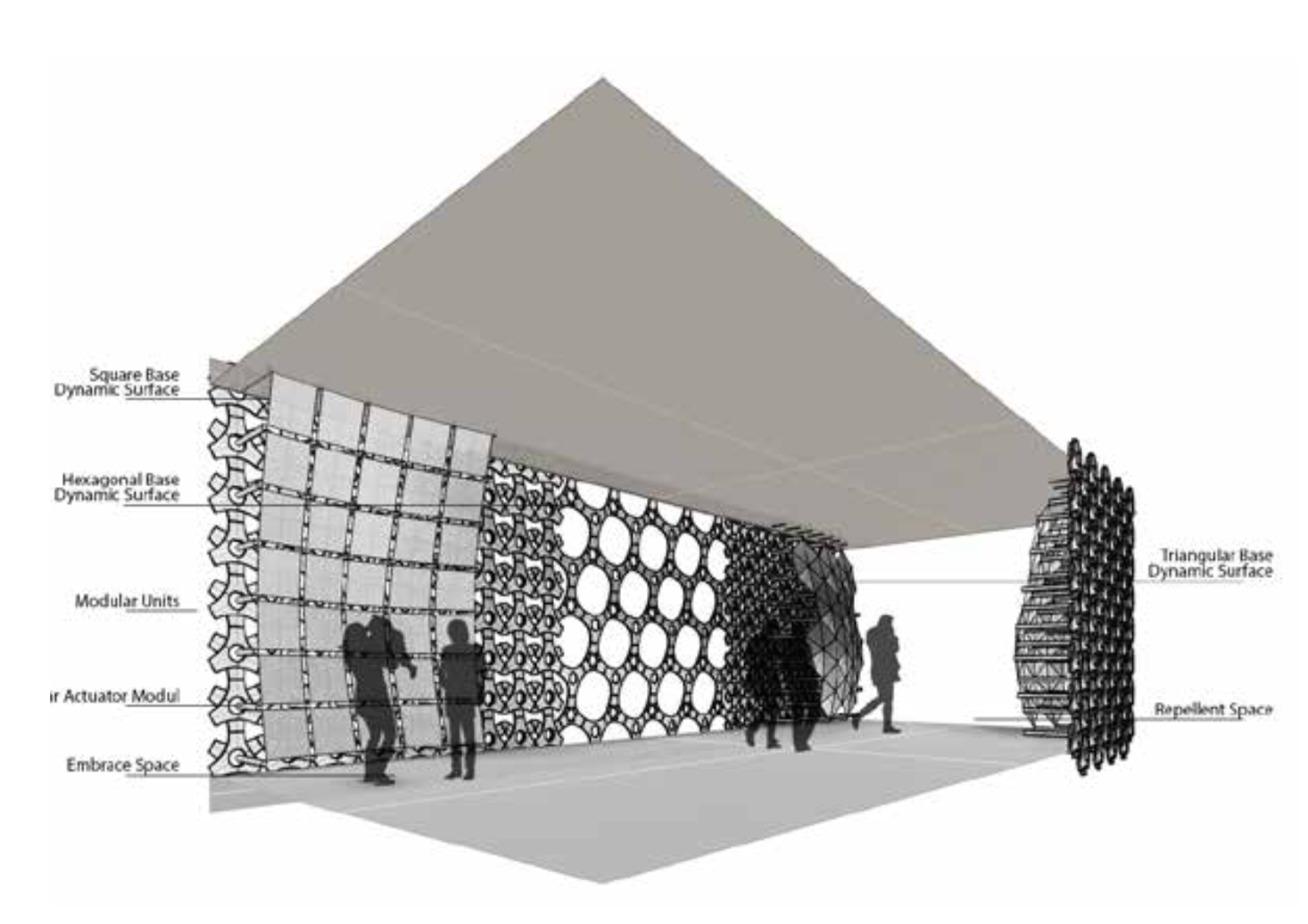
การสร้างพื้นผิวตอบสนอง (Making of a Responsive Surface) คือการสำรวจเทคโนโลยีทางสถาปัตยกรรมและการปฏิสัมพันธ์กับพื้นที่อย่างลึกซึ้ง ด้วยการโฟกัสที่องค์ประกอบพื้นฐาน— เซ็นเซอร์ภาพ Kinect และ โมดูลกลไกเทสเซลเลต—น้องจะได้เรียนรู้วิธีการสื่อสารและประสานรูปทรงทางสถาปัตยกรรมโดยใช้ลอจิกซอฟต์แวร์เฉพาะทางและการตั้งค่าที่ผสานกับ Rhino อย่างแข็งแรง
การนำไปใช้ทางเทคนิค: วิสัยทัศน์เชิงคำนวณและเรขาคณิตพลวัต
โปรเจกต์นี้เผยให้เห็นเลเยอร์ที่ซ่อนอยู่ของอันตรกิริยาระหว่างการเคลื่อนไหวกับโครงสร้างแบบง่ายๆ:
- เลเยอร์ระบุตัวตน: Microsoft Kinect ทำหน้าที่เป็นดวงตาลึกความละเอียดสูง วัดตำแหน่งแต่ละจุดของผู้ใช้งานในพื้นที่ 3 มิติ
- เลเยอร์แปลงข้อมูล: Arduino Mega ใช้โปรโตคอล Firmata ความเร็วสูงเพื่อรับเวกเตอร์การเคลื่อนไหวจาก Rhino Grasshopper
- เลเยอร์อินเทอร์เฟซ: Firefly for Grasshopper ทำหน้าที่เป็นสะพานข้อมูลความละเอียดสูงสำหรับตรวจสอบสถานะพื้นผิว (รูปร่าง/การเทสเซลเลต)
- เลเยอร์ขับเคลื่อน: อาร์เรย์เซอร์โวมอเตอร์ ให้ฟีดแบ็กทางกลความละเอียดสูงสำหรับการเปลี่ยนแปลงพื้นผิวพลวัตแต่ละครั้ง
- เลเยอร์ลอจิกประมวลผล: โค้ดระบบใช้กลยุทธ์แบบ "Turing patterns" (หรือ mesh-metamorphosis): มันตีความความใกล้ชิดของผู้ใช้งานและจับคู่การหมุนของโมดูลาร์เพื่อให้การตอบสนองทางสถาปัตยกรรมที่ปลอดภัยและเป็นจังหวะ
จัดไปวัยรุ่น! สู้งานนะน้อง ห้ามช็อตนะตัวนี้
โครงสร้างพื้นฐานด้านฮาร์ดแวร์และสถาปัตยกรรม
- Arduino Mega 2560: เป็น "สมอง" ของโปรเจกต์นี้ จัดการการสั่งงานเซอร์โวหลายทิศทางและประสานข้อมูลจาก Kinect ให้ทำงานพร้อมกัน
- Micro-soft Kinect: ทำหน้าที่เป็น "ลิงก์เซนเซอร์" ที่เร็วและแม่นยำสำหรับทุกจุดของโครงสร้าง
- โมดูลแบบ Tessellated: เป็น "โครงสร้างกลไก" ที่ให้ความแม่นยำสูงและน่าเชื่อถือสำหรับภารกิจการตอบสนองแต่ละครั้ง
- Rhino Grasshopper: สำคัญมากสำหรับการสร้างแพลตฟอร์มคำนวณที่ชัดเจนและประหยัดพลังงานสำหรับตรรกะทางเรขาคณิต
- แหล่งจ่ายไฟ 12V 5A: จัดการอินเทอร์เฟซทางกายภาพที่ชัดเจนและเป็นมืออาชีพให้กับภารกิจของแต่ละเซอร์โว
- สาย USB B: ใช้สำหรับโปรแกรม Arduino และเป็นอินเทอร์เฟซหลักสำหรับตัวควบคุมระบบ
[!IMPORTANT] ต้องใช้ Arduino Mega แทน Uno นะน้อง! เพื่อให้แน่ใจว่ามีพาวเวอร์และหน่วยความจำเพียงพอจะจัดการสัญญาณเซอร์โวเป็นร้อยๆ ตัวจาก Rhino Grasshopper ได้!
ขั้นตอนการทำงานอัตโนมัติและโต้ตอบของพื้นผิว
กระบวนการจำลองพื้นผิวตอบสนองถูกออกแบบให้มีประสิทธิภาพสุดๆ:
- ตั้งค่า Workspace: ตั้งค่า Kinect และ Arduino Mega บนโครงติดตั้งให้ถูกต้อง และต่อเซอร์โวให้เรียบร้อย
- ตั้งค่า Sync เอาต์พุต: ใน Rhino Grasshopper ให้เริ่มต้นคอมโพเนนต์
Fireflyและกำหนดพอร์ต Firmata เพื่อประสานการเคลื่อนไหว - ลูปการสื่อสารภายใน: พื้นผิวจะทำการตรวจสอบความลึกแบบประสิทธิภาพสูงอย่างต่อเนื่อง และอัพเดทตำแหน่งเซอร์โวแบบเรียลไทม์ตามการเคลื่อนไหวของผู้ใช้งาน
- บูรณาการฟีดแบ็กภาพและการคำนวณ: ดูแดชบอร์ดจริงและพรีวิวใน Rhino เปลี่ยนเป็นสัญญาณสถานะที่มีจังหวะ พัลส์และตามการตั้งค่าทางพื้นที่จากระยะไกลได้เองอัตโนมัติ
แผนขยายในอนาคต
- บูรณาการ OLED Identity Dashboard: เพิ่มจอ OLED ขนาดเล็กบนแผงควบคุมเพื่อแสดง "ผู้ใช้งานที่กำลังทำงาน" หรือ "อัตราเฟรม (FPS)"
- ซิงค์หลายเซนเซอร์กับสภาพอากาศ: เชื่อมต่อ "เซนเซอร์ตรวจจับระยะใกล้" พิเศษ เพื่อทำการตอบสนองแบบ "สัมผัสเฉพาะจุด" ที่แม่นยำยิ่งขึ้นผ่านระบบคลาวด์แบบไร้สาย
- ซัพพอร์ตการซิงค์กับการลงทะเบียนอินเทอร์เฟซคลาวด์: เพิ่มเว็บแดชบอร์ดพิเศษบนสมาร์ทโฟนผ่าน WiFi/BT เพื่อติดตามและบันทึกประวัติการเคลื่อนไหวทั้งหมดอย่างแม่นยำ
- ซัพพอร์ตการปรับแต่งโพรไฟล์ความเร็วขั้นสูง: เพิ่ม "Machine Learning (vCore)" พิเศษลงในโค้ด เพื่อให้รูปแบบการทำงานถูกปรับให้เหมาะสมโดยอัตโนมัติสำหรับการโต้ตอบแบบส่วนตัว
การสร้างพื้นผิวตอบสนองเป็นโปรเจกต์ที่เพอร์เฟกต์สำหรับสายวิทย์คนไหนก็ตามที่มองหาเครื่องมือทางสถาปัตยกรรมที่โต้ตอบได้และน่าสนใจมากกว่านี้! จัดไปวัยรุ่น สู้งานนะน้อง!