เราเปิดตัวโปรเจกต์หุ่นยนต์ต้นแบบของเราไปเมื่อเกือบปีที่แล้ว มันคือหุ่นยนต์แมลงสาบ 6 ขาแบบโอเพ่นซอร์ส พิมพ์จากเครื่อง 3D พริ้นเตอร์ แล้วก็ฮิตติดลมบนเลยจ้า มีคนทั่วโลกสร้างมันขึ้นมาแล้วกว่า 1,000 ตัว รวมถึงโรงเรียนอีกเป็นร้อยแห่งด้วย
แต่เราอยากทำอะไรที่ใหญ่กว่านั้นไง เลยออกแบบ Max the Megapod ขึ้นมา ตัวนี้ใหญ่จนหันหัวตามเลยจ้า ยืนสูงเกือบ 2 ฟุต นั่งแผ่หละก็ 3 ฟุตเชียว

เหมือนกับน้องตัวเล็กของมัน Max ตัวนี้ก็เป็นโอเพ่นซอร์ส พิมพ์จาก 3D พริ้นเตอร์ ใช้ Arduino เป็นสมอง บังคับผ่านบลูทูธ ใช้ Scratch ควบคุมได้ และที่สำคัญ...สนุกสุดเหวี่ยง 100%

ภาพรวมโปรเจกต์
"Max the Megapod" คือการสำรวจอย่างจริงจังในเรื่อง การเคลื่อนที่ของหุ่นยนต์ 6 ขาขนาดยักษ์ และ การจัดการพลังงานกระแสสูง การขยายสเกลจากหุ่นยนต์ 1 ปอนด์ เป็น "Megapod" 9 ปอนด์ นำมาซึ่งความท้าทายแบบก้าวกระโดดในเรื่องการรับน้ำหนักโครงสร้างและแรงเสียดทานจลน์ โปรเจกต์นี้ใช้สถาปัตยกรรม Arduino Nano แบบกระจายศูนย์เพื่อควบคุมเซอร์โวแรงบิดสูง MG958 จำนวน 12 ตัว ประสานงาน การเดินเลียนแบบธรรมชาติ (Biomimetic Gaits) ที่ซับซ้อน ในขณะที่รักษาความแข็งแรงของโครงสร้างผ่านบานพับที่ใช้ลูกปืนสเกตและการวินิจฉัยระบบจ่ายไฟกำลังสูง
ลึกลงไปในรายละเอียดทางเทคนิค
- การวิเคราะห์การเดินของหุ่นยนต์ 6 ขา:
- การวิเคราะห์การเดินแบบ Tripod-Gait: เพื่อเคลื่อนมวล 9 ปันด์อย่างคล่องแคล่ว ระบบใช้ "Tripod Gait" ซึ่งมีขา 3 ขายังคงสัมผัสพื้นขณะที่อีก 3 ขาเคลื่อนที่ไปข้างหน้า การวิเคราะห์นี้เกี่ยวข้องกับการคำนวณการเคลื่อนที่ของจุดศูนย์ถ่วง (CoG) ในระหว่างการเปลี่ยนท่าแต่ละครั้ง เพื่อให้แน่ใจว่าค่ามาร์จิ้นของความเสถียรสถิตไม่ถูกละเมิด
- ฮาร์มอนิกของการเดินแบบ Ripple & Wave Gait: สำหรับการปีนที่รับน้ำหนักมากหรือการบังคับเลี้ยวที่แม่นยำ เฟิร์มแวร์สามารถเปลี่ยนไปใช้ "Ripple Gaits" (ขาละข้าง) ได้ ซึ่งจะลดค่ากระแสสูงสุด $(I_{peak})$ ที่ดึงจากแบตเตอรี่ โดยกระจายเหตุการณ์การใช้แรงบิดของเซอร์โวออกไปในหน้าต่างเวลาที่ยาวขึ้น ทำให้ควบคุมการเคลื่อนไหวได้ละเอียดขึ้น
- การวินิจฉัยการกระจายพลังงาน:
- การวิเคราะห์บัสกระแสสูง: การขับเซอร์โว MG958 จำนวน 12 ตัวพร้อมกันสามารถทำให้เกิดสไปก์กระแสเกิน 15A โปรเจกต์นี้ใช้สายไฟชุดจ่ายไฟพิเศษที่มีสายเกจต่ำและคอนเนคเตอร์พื้นที่ผิวสูง ทำการวินิจฉัยทางลอจิกเพื่อแยกเรลไฟ 5V ของ Arduino ออกจากเรลไฟเซอร์โว 6V-7.4V ที่มีสัญญาณรบกวนสูง ป้องกันการรีเซ็ตจากปัญหา "Voltage-Dip"
- การลดแรงเสียดทานเชิงโครงสร้าง: ไม่เหมือนหุ่นยนต์ตัวเล็ก Max ใช้ลูกปืนอุตสาหกรรมเบอร์ 608 ที่ข้อต่อขาแต่ละข้าง ซึ่งช่วยลดค่าสัมประสิทธิ์แรงเสียดทานในการหมุน $(\mu)$ ทำให้เซอร์โวสามารถใช้งบประมาณแรงบิดทั้งหมดไปกับการเคลื่อนย้ายน้ำหนักบรรทุก แทนที่จะต้องไปสู้กับแรงต้านทานเชิงกลภายใน
วิศวกรรมและการนำไปใช้
การควบคุมแบบกระจาย (Distributed Control Orchestration):
- I2C PWM Master: เราใช้ไดรเวอร์ PCA9685 เพื่อแบ่งเบาภาระการสร้างสัญญาณ PWM จาก Arduino Nano ตัวหลัก วิธีนี้รับประกันว่าสัญญาณเซอร์โวความถี่สูง $(50\text{Hz})$ จะไม่กระตุก (jitter-free) แม้ว่า Nano จะกำลังประมวลผลตรรกะจาก Scratch ที่ซับซ้อนหรือเฟรมการสื่อสาร Bluetooth อยู่ก็ตาม
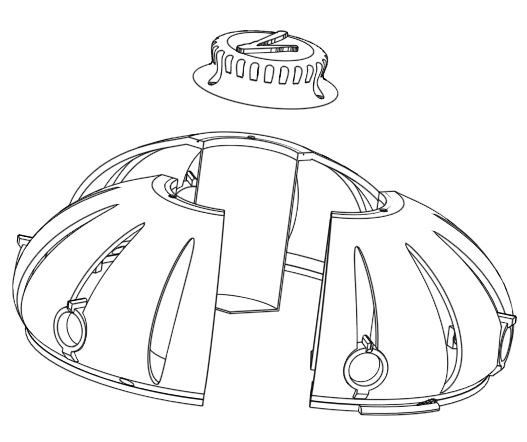
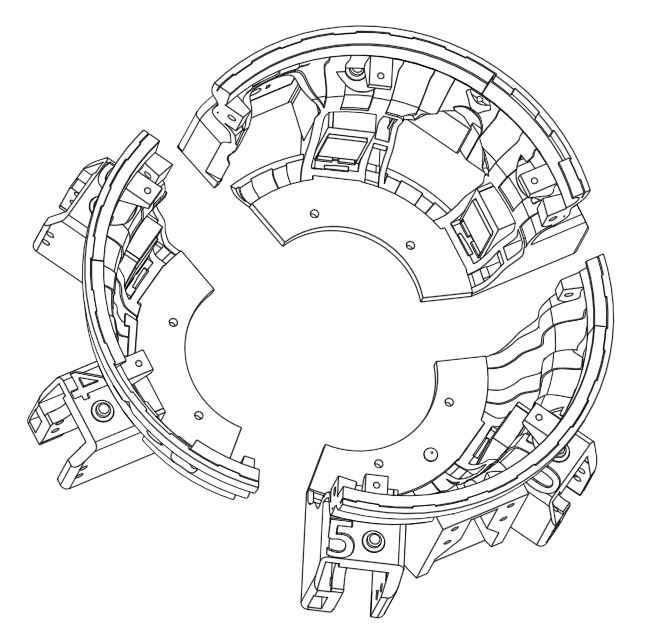
- การออกแบบโครงสร้าง (Structural Geometry Forensics): โครงตัว (chassis) เป็นชุดประกอบโมดูลาร์ที่พิมพ์จากเครื่องพิมพ์ 3D จุดรับน้ำหนักสำคัญ—เช่น "ฐาน-ชาม (Base-Bowl)" และ "ขา-เบ้า (Leg-Cradles)"—ได้รับการออกแบบให้มีจุดยึดสกรูที่เสริมความแข็งแรงและมีดีไซน์ชิ้นส่วนแยก (split-part) ทำให้เราสามารถพิมพ์ปีกขนาดมหึมาที่กว้างถึง 3 ฟุต บนเครื่องพิมพ์ 3D ฮ็อบบี้ขนาดมาตรฐาน 200mm ได้
การขยายขนาดที่ไม่ขึ้นกับซอฟต์แวร์ (Software-Agnostic Scaling):
- แม้ตัวจะใหญ่ขึ้น แต่ Megapod ยังคงความเข้ากันได้เต็มที่กับ ฐานโค้ด Vorpal Scratch การออกแบบแบบแยกส่วน (abstraction) นี้ทำให้ผู้ใช้สามารถพัฒนาท่าทางการเดิน (gaits) ในสภาพแวดล้อมการเขียนโปรแกรมแบบ visual ระดับสูงได้ ขณะที่เฟิร์มแวร์ Arduino ตัวล่างจะแปลคำสั่งเหล่านั้นเป็นระยะเวลาการหมุนมุมเซอร์โวที่แน่นอน (deterministic)
ได้รับรางวัล Editor's Choice จากนิตยสาร MAKE:
เมื่อไม่กี่สัปดาห์ที่แล้วเราเอาเจ้าแม็กซ์ไปโชว์ที่งาน New York Maker Faire ผู้คนชอบมันมาก! ทั้งเด็กตัวเล็กๆ (และแม้แต่พ่อแม่พวกเขา) ตาลุกวาวทุกครั้งที่เจ้าแม็กซ์ในบูธเราตื่นขึ้นมาและเริ่มเต้นท่าโหดๆ ผู้คนส่งเสียงฮือฮาด้วยความตกใจเมื่อมันเริ่มเต้นและวิ่งวุ่นข้ามโต๊ะด้วยความเร็วที่น่าตกใจ
บรรณาธิการจากนิตยสาร MAKE: เห็นปฏิกิริยาของผู้คนแล้วก็มอบรางวัล "Editor's Choice Award" ที่ใครๆ ก็อยากได้ให้กับเราในงานนั้น

เราเชื่อในโอเพ่นซอร์ส
เหมือนกับโปรเจกต์อื่นๆ ของเรา เจ้าแม็กซ์นี้เป็นโอเพ่นซอร์ส ภายใต้สัญญา CC-BY-SA แบบจำลอง 3D และซอร์สโมเดลทั้งหมดเปิดให้ดาวน์โหลดเพื่อความสนุกในการแฮ็กของคุณ โค้ด Arduino และ Scratch ก็เปิดสาธารณะเช่นกัน เราไม่ได้ใช้ชิ้นส่วนที่เป็นกรรมสิทธิ์เฉพาะ (proprietary) เลย อิเล็กทรอนิกส์ทุกชิ้นเป็นโอเพ่นซอร์ส (Arduino Nano, Adafruit Servo Driver) หรือหาซื้อได้ทั่วไป (เซอร์โวไซส์มาตรฐาน, คอนเนคเตอร์มาตรฐาน, ไม่มีบอร์ดเฉพาะแบบใดๆ ทั้งสิ้น)
เรามีชุดอุปกรณ์ (kit) ที่สะดวกสบายพร้อมทุกอย่างที่คุณต้องการให้ซื้อด้วยนะ (ชุด Megapod อยู่ที่นี่) เราพบว่าถ้าเราจัดชุดอุปกรณ์ให้ คนจะได้สร้างโปรเจกต์นี้กันมากขึ้น และพวกเขาก็จะประสบความสำเร็จมากขึ้นด้วย มีหลายคนที่พยายามหาซื้อชิ้นส่วนเอง แต่สุดท้ายก็ซื้อผิด หรือโดนหลอกให้ซื้อของเสียจากผู้ข่ายที่ไม่ซื่อสัตย์
ถ้าน้องกำลังคิดจะสร้าง Megapod ของตัวเอง แต่ยังไม่เคยสร้างโปรเจกต์หุ่นยนต์ที่ค่อนข้างซับซ้อนมาก่อน พี่แนะนำว่าให้เริ่มจากโมเดลดั้งเดิม **Vorpal the Hexapod** ที่ตัวเล็กกว่า ราคาถูกกว่า และสร้างง่ายกว่าก่อนดีกว่า
จุดเริ่มต้นและคำขอบคุณ
ขอบคุณ Gaige Moore ที่ช่วยพัฒนาต้นแบบของ Vorpal the Hexapod ตัวเล็ก ที่ Max ตัวนี้ดัดแปลงมาจากมัน และที่ช่วยสร้างและทดสอบ Max ในช่วงพัฒนาด้วยนะ
ขอบคุณ นักเขียนนิยายวิทยาศาสตร์ Peter S. Drang ที่เป็นคนแรกที่แนะนำให้ทำ Hexapod ตัวเบิ้มแบบนี้ขึ้นมา
การขยายสเกลมันไม่ง่ายเลยนะเว้ย!
Max ตัวนี้พัฒนามาจาก Vorpal Hexapod ตัวเดิมนั่นแหละ แต่เชื่อพี่เถอะ มันยากกว่าการสั่งปริ้นท์ชิ้นส่วนขยาย 200% เยอะ!
ต้องปรับเปลี่ยนโมเดล 3D เป็นร้อยๆ จุดเพื่อให้มันใช้งานได้จริง และยังปริ้นท์ออกมาได้ด้วยเครื่องปริ้นท์ขนาดกลางทั่วๆ ไป (แค่ต้องใช้ฐานปริ้นท์ขนาดประมาณ 200mm คิวบ์ หรือ 8 นิ้วนั่นแหละ ซึ่งเดี๋ยวนี้ใครๆ ก็มีกันแล้ว)
การเปลี่ยนแปลงหลักๆ มีดังนี้:
- **ต้องใช้ตลับลูกปืนจริงๆ สำหรับจุดยึด Servo ทุกตัว** Hexapod ตัวเดิมหนักแค่ปอนด์เดียว เลยใช้ปุ่มพลาสติกเล็กๆ แทนได้ แต่สำหรับ Max ตัวเบิ้ม 9 ปอนด์นี่ ใช้วิธีเดิมไม่ได้เลย แรงเสียดทานจะมหาศาล! เราเลือกใช้ตลับลูกปืนเบอร์ 608 แบบที่หาซื้อได้ทั่วไปตามร้านสเก็ต เพื่อให้โปรเจกต์นี้เป็นโอเพ่นซอร์สที่ใช้อุปกรณ์หาง่ายจริงๆ
- **ชิ้นส่วนที่ใหญ่ที่สุดถูกแบ่งออกและเพิ่มจุดยึดด้วยสกรู** เพื่อให้ปริ้นท์ด้วยเครื่อง 3D Printer ขนาดกลางได้ แค่ต้องใช้ฐานปริ้นท์ขนาด 200mm คิวบ์ (ประมาณ 8") ซึ่งหลายคนก็มีเครื่องขนาดนี้อยู่แล้ว
- **ระบบไฟฟ้าทั้งหมดต้องเปลี่ยน** เพราะ Servo ตัวใหญ่กินกระแสสูงขึ้นมาก
- **กล่องบรรจุชิ้นส่วนอิเล็กทรอนิกส์ทั้งหมดถูกออกแบบใหม่** และสายจ่ายไฟก็ใหญ่โตมโหฬารเมื่อเทียบกับโปรเจกต์ Hexapod ตัวเล็ก การเดินสายไฟให้ Max ใช้เวลาถึง 2 ชั่วโมงเต็ม ในขณะที่ของตัวเล็กใช้เวลาแค่ 15 นาที (ในชุดคิทของเรา ชิ้นส่วนเหล่านี้จะบัดกรีมาให้เรียบร้อยแล้ว)
- **ใช้เวลานานมากในการหา Servo ที่เหมาะจะขับเคลื่อนโปรเจกต์นี้** หลังจากลองมาหลายแบบ สุดท้ายเราตกหลุมรัก MG958 จาก Tower Pro ซึ่งเป็นตัวที่สมดุลระหว่างราคาถูกและประสิทธิภาพสูงได้ดีมาก
- **คู่มือประกอบต้องปรับปรุงใหม่ทั้งหมด** รวมถึงต้องมีไดอะแกรมและรูปภาพใหม่เพิ่มเติม
โดยรวมแล้ว เราใช้เวลาอย่างน้อย 300 ชั่วโมง (ไม่รวมเวลาปริ้นท์ที่ล้มเหลวหลายรอบ) และเงินเป็นพันๆ ดอลลาร์ ในการสร้างเวอร์ชันขนาดสองเท่านี้ขึ้นมา สู้งานนะน้อง! 💪
ความเข้ากันได้ของซอฟต์แวร์
ที่น่าสนใจคือ สิ่งหนึ่งที่แทบไม่เปลี่ยนเลยคือเรื่องซอฟต์แวร์ เราไม่ต้องปรับเปลี่ยนอะไรในอินเทอร์เฟซ Scratch เลย และไม่ต้องแก้โค้ด Arduino (จากหลายพันบรรทัด) ด้วยซ้ำ ทำให้เรารักษาโค้ดเบสเดียวกันระหว่างหุ่นยนต์ตัวใหญ่และตัวเล็กได้สบายๆ
เข้ากันได้เต็มรูปแบบกับ Vorpal the Hexapod
Max นี่เข้ากันได้ทุกฟีเจอร์กับ Vorpal Hexapod ตัวเดิมแบบเต็มสูบเลย ประกอบด้วย:
- ท่าเต้นทุกท่า โหมดเดิน และการเคลื่อนไหวขาทุกแบบ ทำงานเหมือนเดิมเป๊ะใน Max การเคลื่อนไหวเร็วเท่าเดิม แต่เพราะ Max ตัวใหญ่เป็นสองเท่า ความเร็วบนพื้นก็เลยเป็นสองเท่าไปด้วย สำหรับหุ่นยนต์หกขาแล้ว มันเคลื่อนที่เร็วโคตรๆ เราเชื่อว่าเขาอยู่ในลีกของหุ่นยนต์เดินแบบโอเพ่นซอร์สที่เร็วที่สุดตัวนึงเลย
- Max โปรแกรมได้ด้วย Scratch เต็มรูปแบบ รวมถึงความสามารถในการสร้างท่าเดิน (gait) ใหม่และการเคลื่อนไหวขาใหม่โดยใช้ Scratch แล้วอัปโหลดลงเกมแพดเพื่อใช้ระหว่างทำกิจกรรมต่างๆ ได้ด้วยซ้ำ แค่บันทึกท่าไว้ ก็ใช้ได้เลยโดยไม่ต้องต่อกับคอมพิวเตอร์ตลอดเวลา
- Max ใช้เกมแพดเดียวกัน (พิมพ์จากเครื่อง 3D printer) กับ Vorpal เลย ถ้าน้องเคยสร้างหุ่นตัวเล็กมาก่อน ก็ไม่ต้องมานั่งเรียนรู้คำสั่งใหม่ให้ปวดหัว
ตอนแรกเราเริ่มออกแบบเจ้านี่แค่เป็นของโชว์ในบูธที่งาน Maker Faire, งานประชุมครู หรืองานแสดงสาธารณะอื่นๆ เพื่อเรียกความสนใจจากผู้คนเท่านั้น แต่มีคนถามเข้ามาเรื่อยๆ ว่าสร้างเองได้มั้ย เลยต้องลงแรงเพิ่มเพื่อทำให้มันกลายเป็นชุดคิทที่ประกอบง่ายๆ
ตอนนี้มีคนจากทั่วโลกซื้อชุดคิท Max the Megapod ของเราไปแล้ว และเรารู้ว่ามี Maker อย่างน้อยสองคนที่กำลังสร้างโปรเจกต์นี้จากชิ้นส่วนที่จัดหามาเอง ไม่นานนี้คงจะมี Megapod วิ่งกันให้วุ่นไปทั่วโลก อยู่ข้างๆ น้องตัวเล็กอย่าง Vorpal Hexapod แน่นอน
สรุป
Max the Megapod นี่คือตัวแทนของ การขยายขนาดระบบแมคคาทรอนิกส์แบบโอเพ่นซอร์ส ในระดับสุดยอดเลย ด้วยการเชี่ยวชาญ การวิเคราะห์ท่าเดิน (Gait Forensics) และ การวินิจฉัยความสมบูรณ์ของกำลังไฟ (Power Integrity Diagnostics) ทำให้ vorpalrobotics ส่งมอบแพลตฟอร์มหุ่นยนต์เพื่อการศึกษาที่ทรงพลัง ซึ่งพิสูจน์ให้เห็นแล้วว่าระบบเลียนแบบชีวภาพ (biomimetic) ที่ใช้ Arduino เป็นฐานนั้น ขยายขนาดไปใช้ในสภาพแวดล้อมที่ต้องทำงานหนักได้จริง
Gait Grandeur: การก้าวสู่หุ่นยนต์สเกลใหญ่ผ่านการวิเคราะห์กำลังไฟอย่างแม่นยำ
งานในอนาคต: Gigapod รึเปล่า?
เรากำลังทำเวอร์ชันที่ใหญ่กว่านี้อีกสำหรับงาน NY Maker Faire ปีหน้าอยู่รึเปล่า? จะมี Gigapod ตามมาในอนาคตมั้ย?
ปัญหาที่จะเกิดขึ้นเมื่อขยายขนาดขึ้นอีกเท่าตัว (เส้นผ่านศูนย์กลางเกือบ 4 ฟุตตอนยืน และคาดว่าหนักประมาณ 50 ปอนด์) นั้นแก้ยากยิ่งกว่าเดิม และจะใช้งบพัฒนาอย่างน้อยประมาณหมื่นดอลลาร์เพื่อทำให้สมบูรณ์แบบ
เราบ้าพอที่จะลองมั้ย? ภรรยาผมจะยอมให้ผมทุ่มเงินหมื่นดอลลาร์ไปสร้างของเล่นชิ้นใหญ่ยักษ์สุดเจ๋งนี้รึเปล่า?
คอยติดตามกันนะ!
ลิงก์ไปยังไฟล์ Open Source และข้อมูลเพิ่มเติม
- ไฟล์ STL บน Thingiverse
- ซอร์สโค้ด Arduino บน GitHub
- คู่มือประกอบ Megapod (รวมรายการวัสดุ)
- ซอร์สโมเดล 3D บน OnShape.com: (คลิกที่แท็บ "Megapod")
- ข้อมูลชุด Maker Kit "Max the Megapod"
- ข้อมูลชุด Maker Kit "Vorpal the Hexapod" (เวอร์ชันเล็กกว่า)
- หน้าโปรเจค Arduino Project Hub ต้นฉบับของ "Vorpal the Hexapod" (ถ้ายังไม่เคยสร้างโปรเจครถหุ่นยนต์ที่ซับซ้อนปานกลางมาก่อน แนะนำให้เริ่มจากเวอร์ชันเล็กก่อนนะน้อง ราคาถูกกว่าและประกอบง่ายกว่า)
- เว็บไซต์หลักของ VorpalRobotics (รวมโปรเจคทั้งหมดของเรา)