ภาพรวมโปรเจค
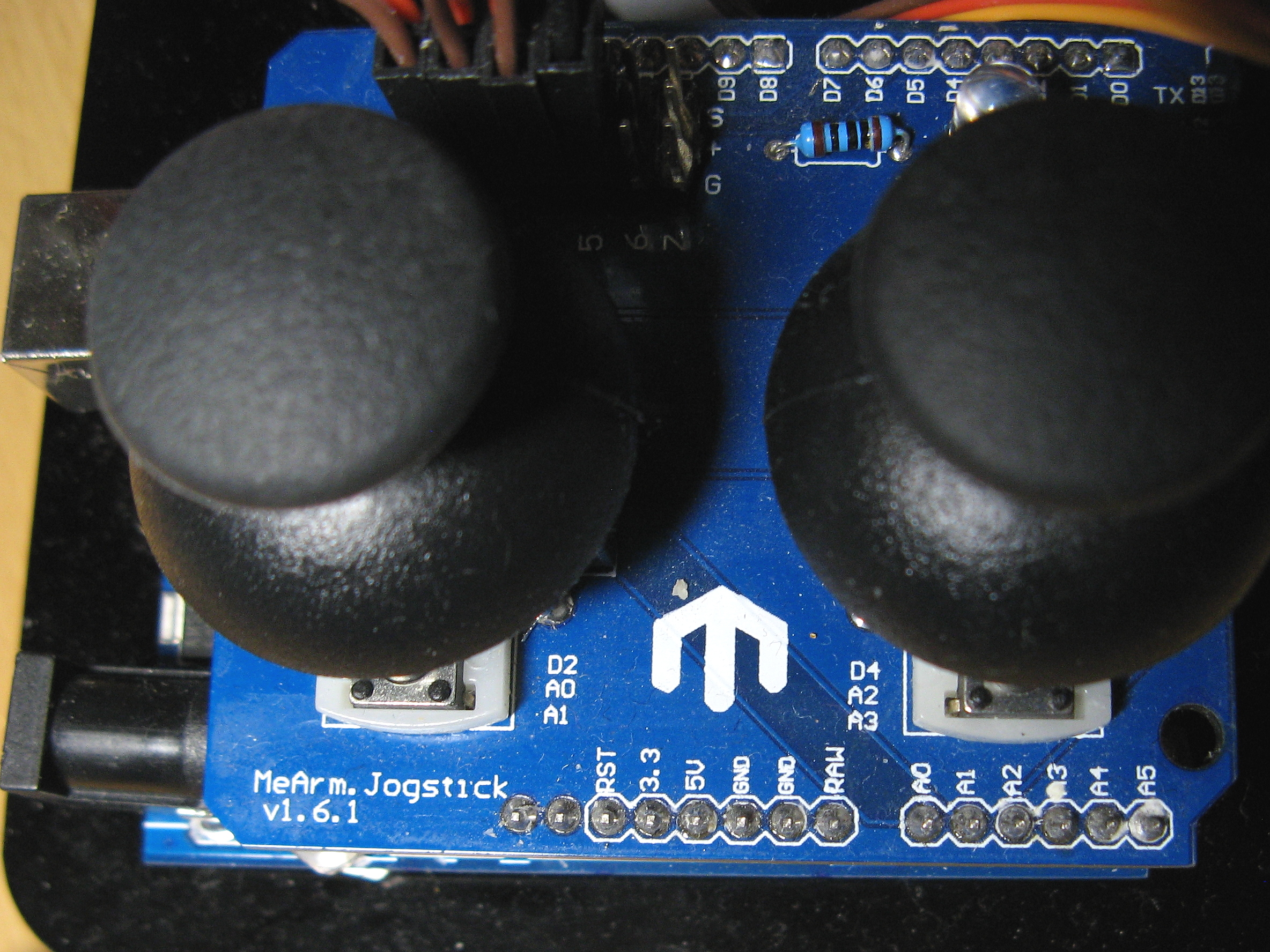
โปรเจคนี้ใช้บอร์ดจอยสติ๊ก MeArm v1.6.1 นะน้อง "Arm-Path" คือการทดลองเล่นเรื่อง Industrial Motion Recording สำหรับหุ่นยนต์เพื่อการศึกษาแบบราคาเบาๆ จัดไปวัยรุ่น! การควบคุมด้วยจอยสติ๊กแบบธรรมดามันก็ง่ายดี แต่ความสามารถในการ บันทึก, บันทึก, และลูป การเคลื่อนไหวแบบ 4 องศาอิสระ (4-DOF) นี่แหละที่จะเปลี่ยนเจ้า MeArm ให้กลายเป็นเครื่องจำลองการหยิบและวาง (pick-and-place) แบบใช้งานได้จริงเลย โดยใช้ State-Machine Architecture ที่ออกแบบมาดี ระบบจะประสานงานระหว่างอินพุตจากมือเรา, การบันทึกจากเซนเซอร์, และการเล่นซ้ำแบบอัตโนมัติ พร้อมทั้งจัดการเรื่องสัญญาณของระบบแมคคาทรอนิกส์ให้เรียบร้อย
ลึกลงไปในรายละเอียดทางเทคนิค
ระบบนี้มีโหมดการทำงาน 4 โหมดหลักๆ ที่จัดการด้วย State Machine:
- โหมด Manual (Idle): จอยสติ๊กสองแกนจะควบคุมเซอร์โวตรงๆ เลย ทั้งตัวฐาน, ไหล่, ข้อศอก, และกรงเล็บ
- โหมด Record (Sampling): ระบบจะทำการสุ่มตัวอย่างค่า PWM ปัจจุบันของเซอร์โวในระยะเวลาที่กำหนดอย่างแม่นยำ พิกัดเหล่านี้จะถูกส่งเข้าไปเก็บในบัฟเฟอร์ เพื่อจับ "เส้นทาง" การเคลื่อนที่ของปลายแขน ห้ามช็อตนะตัวนี้! โหมดนี้จะมีไฟ LED ติดค้างไว้เป็นสัญญาณ
- โหมด Play: MCU จะไล่อ่านค่าจากบัฟเฟอร์ที่บันทึกไว้ทีละค่า เพื่อสร้างการเคลื่อนไหวขึ้นมาใหม่สำหรับเล่นซ้ำหนึ่งรอบ
- โหมด Play Repeatedly: ใช้ลูปลอจิกพร้อมกับสัญญาณไฟ LED ที่กระพริบ (ไฟกระพริบนั่นแหละ) เพื่อจำลองวงจรการทำงานแบบสายการประกอบในอุตสาหกรรม
วิเคราะห์เรื่องการเก็บข้อมูลการเคลื่อนไหว:
- ข้อจำกัดของ EEPROM: เพื่อให้การเคลื่อนไหวยังอยู่แม้จะปิดเครื่องแล้วเปิดใหม่ Arm-Path ใช้ EEPROM ของ Arduino เนื่องจากพื้นที่ EEPROM มีจำกัด (1024 ไบต์) โปรเจคนี้จึงใช้อัตราการสุ่มตัวอย่างที่ประสิทธิภาพสูง เพื่อบาลานซ์ระหว่างความ "ลื่นไหล" ของเส้นทาง กับพื้นที่ความจำที่มี (ใช้เทคนิค byte-level coordinate packing)
การคำนวณและทำให้การเคลื่อนไหวลื่น:
- PWM Step-Slicing: เพื่อป้องกันการเคลื่อนไหวแบบ "กระตุก" เวลาเล่นซ้ำ เฟิร์มแวร์ไม่ได้แค่กระโดดจากค่าที่บันทึกไว้หนึ่งค่าไปอีกค่าหนึ่ง แต่มันทำ Linear Interpolation ด้วย คือมันจะแบ่งระยะทางระหว่างจุดที่บันทึกไว้เป็นขั้นย่อยๆ ทำให้การเคลื่อนไหวของระบบแมคคาทรอนิกส์ลื่นและเป็นธรรมชาติมากขึ้น
วิศวกรรมและการนำไปใช้
- ลอจิกการควบคุม HMI:
- ปุ่มบน Joystick 1: กดเพื่อเริ่ม/หยุดบันทึกพิกัด การกดจะเป็นการสลับ สถานะการบันทึก ไฟ LED ติดค้างแสดงว่ากำลังบันทึกอยู่
- ปุ่มบน Joystick 2: กดเพื่อเริ่ม/หยุดเล่นพิกัดที่บันทึกไว้ การกดจะเป็นการสลับ โหมดเล่นซ้ำหนึ่งรอบ
- ลอจิก Long-Press (2 วินาที): กดค้างปุ่มบนจอยสติ๊ก 2 นาน 2 วินาที เพื่อเริ่ม/หยุดเล่นพิกัดซ้ำๆ วนลูป การกดจะเป็นการเปิด โหมดลูปอัตโนมัติ ซึ่งยืนยันได้จากสถานะไฟ LED ที่กระพริบ
- สะพานควบคุมด้วย IR:
- อย่างที่เห็นในวิดีโอ โมดูล KY-022 เพิ่มเลเยอร์การควบคุมอีกชั้นหนึ่ง ด้วยการใช้รีโมทอินฟราเรด ผู้ใช้สามารถสั่งเริ่มบันทึกหรือเล่นซ้ำจากระยะไกลได้ แยก "ผู้ควบคุม" ออกจาก "เครื่องจักร" เพื่อความปลอดภัยและเพื่อการสาธิต
- เรื่องของไฟเลี้ยง:
- การขับเซอร์โว SG90 สี่ตัวพร้อมกันอาจทำให้เกิดปัญหา "Voltage Sag" บนเรล 5V ได้ ซึ่งอาจทำให้ MCU รีเซ็ตได้ บอร์ด MeArm v1.6.1 ถูกใช้เป็นศูนย์กลางกระจายไฟโดยเฉพาะ เพื่อแยกกระแสไฟของมอเตอร์ออกจากขาอาร์ดูโน่ที่ไวต่อสัญญาณลอจิก สู้งานนะน้อง!
สรุปสั้นๆ แต่อัดแน่น
Arm-Path คือสะพานเชื่อมจากหุ่นยนต์ของเล่นไปสู่โลกของ Industrial Motion Control จริงจังเลยนะตัวนี้! ถ้าน้องๆ จับจุดเรื่อง State-Machine Forensics และ Path Persistence ให้อยู่หมัดละก็ ระบบเมคคาทรอนิกส์สุดล้ำที่ทำงานซ้ำได้ แม่นยำ และอัตโนมัติ ก็ไม่ใช่เรื่องไกลเกินเอื้อมแล้วล่ะ