โปรเจกต์ "Escapement-Logic" นี้คือการสร้างนาฬิกาเชิงกลที่ใช้ Arduino กับเซอร์โวมอเตอร์ขับเข็มหมุนบนหน้าปัดบอกเวลา เรียกได้ว่าเป็นการผสมผสานระหว่าง กลไกการบอกเวลาแบบไฮบริด (Hybrid-Mechanical Chronometry) กับ ระบบเมคคาทรอนิกส์แบบฟันเฟืองล็อค (Ratchet-Drive Mechatronics) เอาไว้ด้วยกันเลย เก๋ไก๋ดีมั้ยล่ะวัยรุ่น!
ลงลึกเทคนิค: ระบบเมคคาทรอนิกส์แบบฟันเฟืองล็อค (Ratchet-and-Pawl)
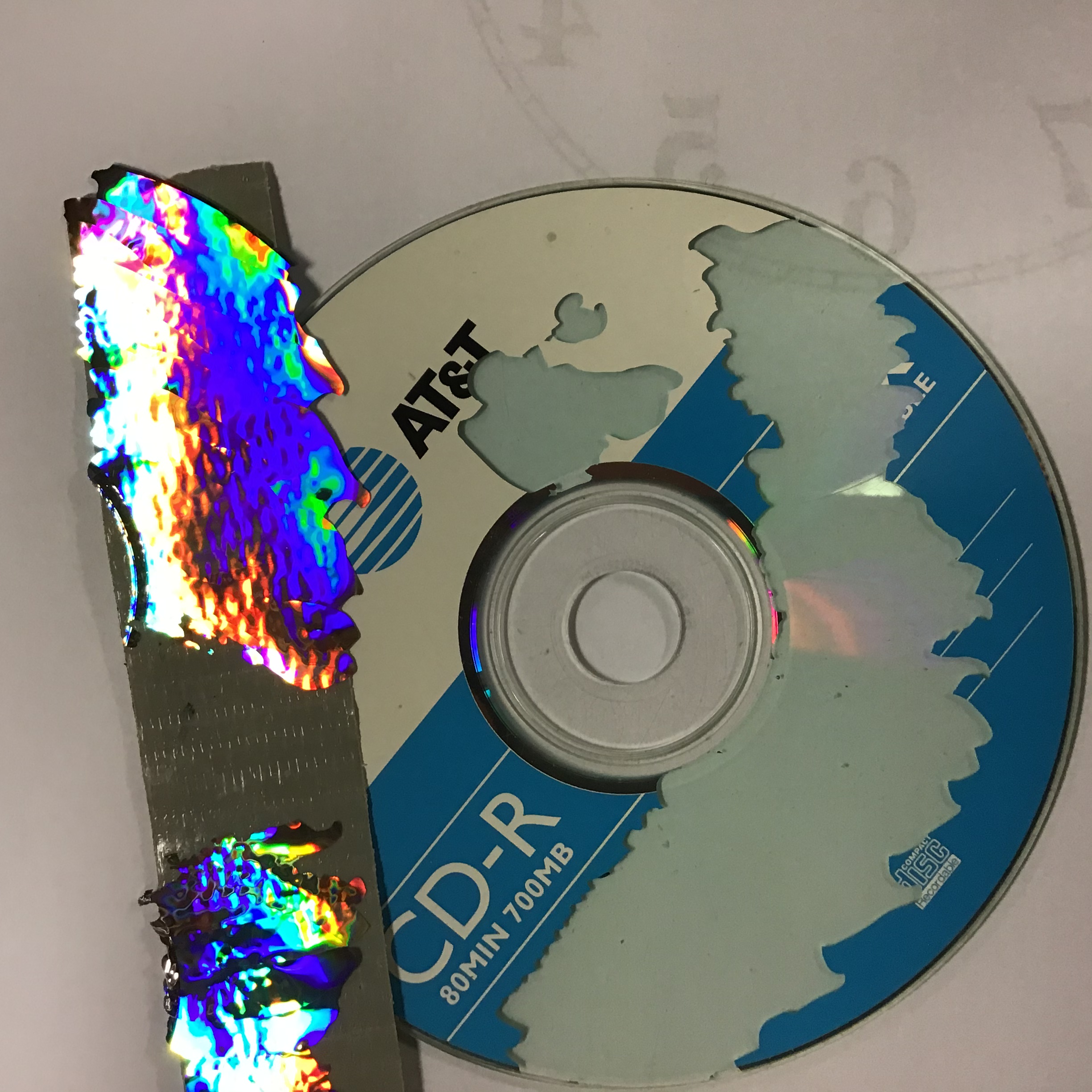
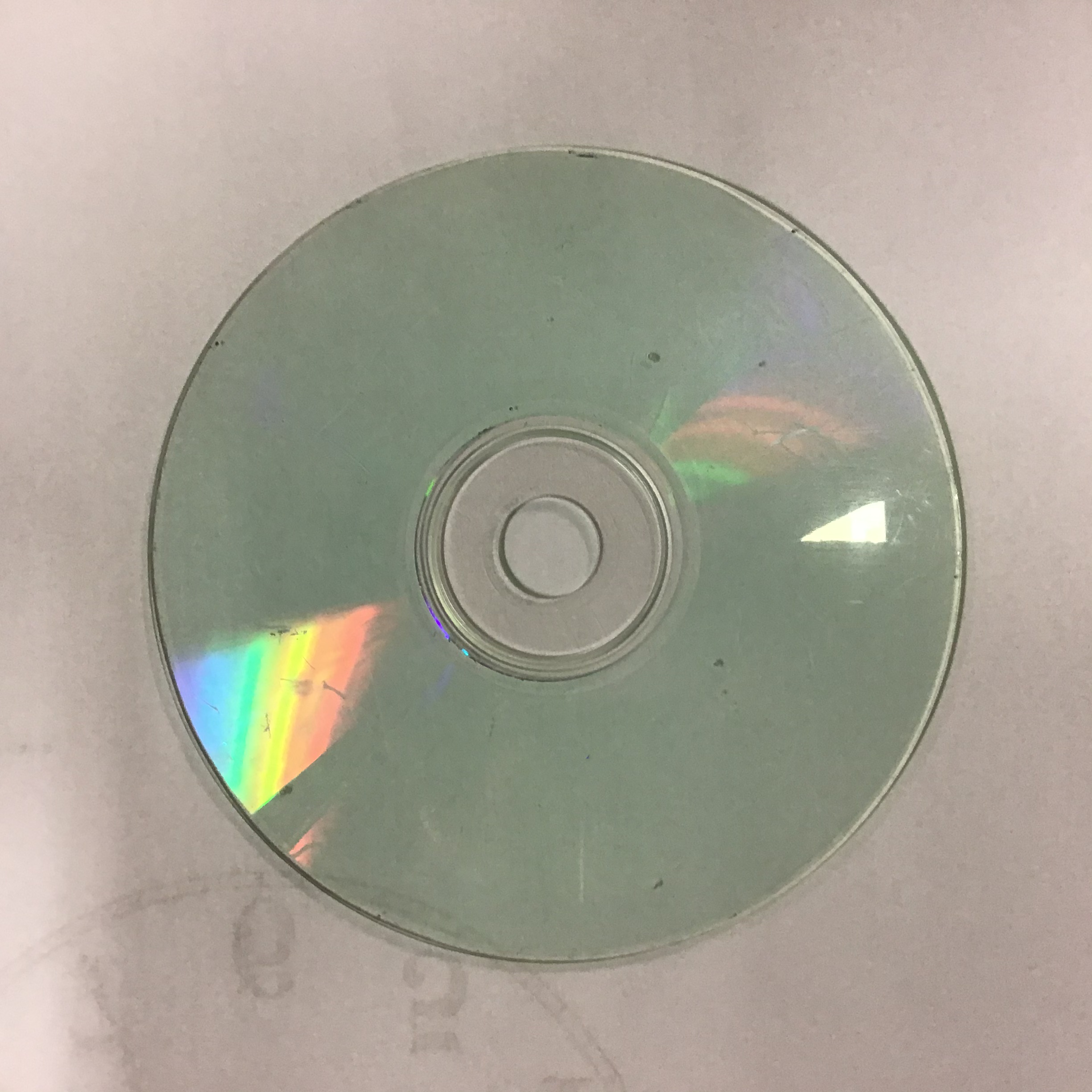
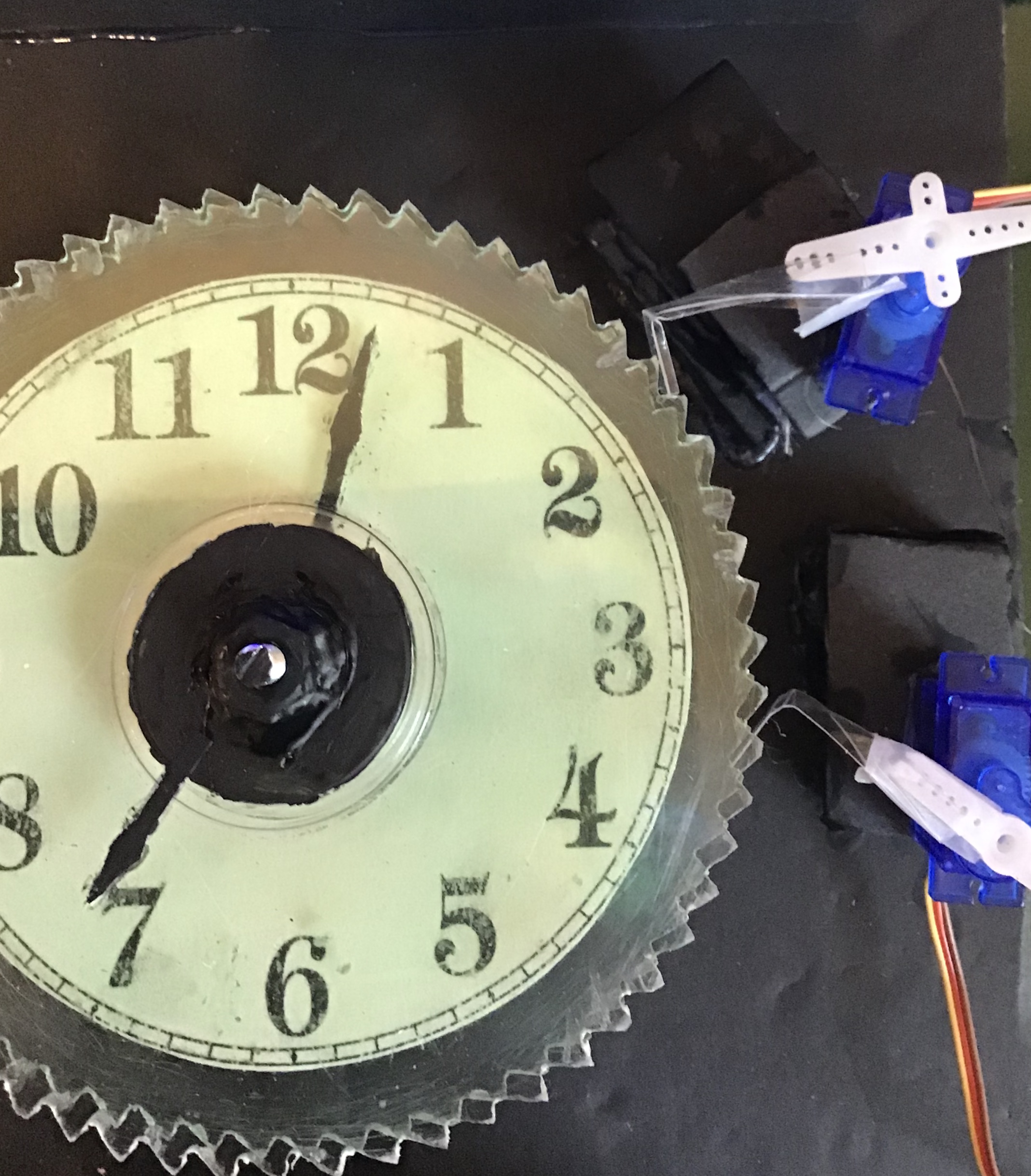
แกนกลางเชิงกลของนาฬิกาเราสร้างมาจากซีดีเก่าที่รีไซเคิลมาเป็นชุดเกียร์ความแม่นยำสูงเลยทีเดียว
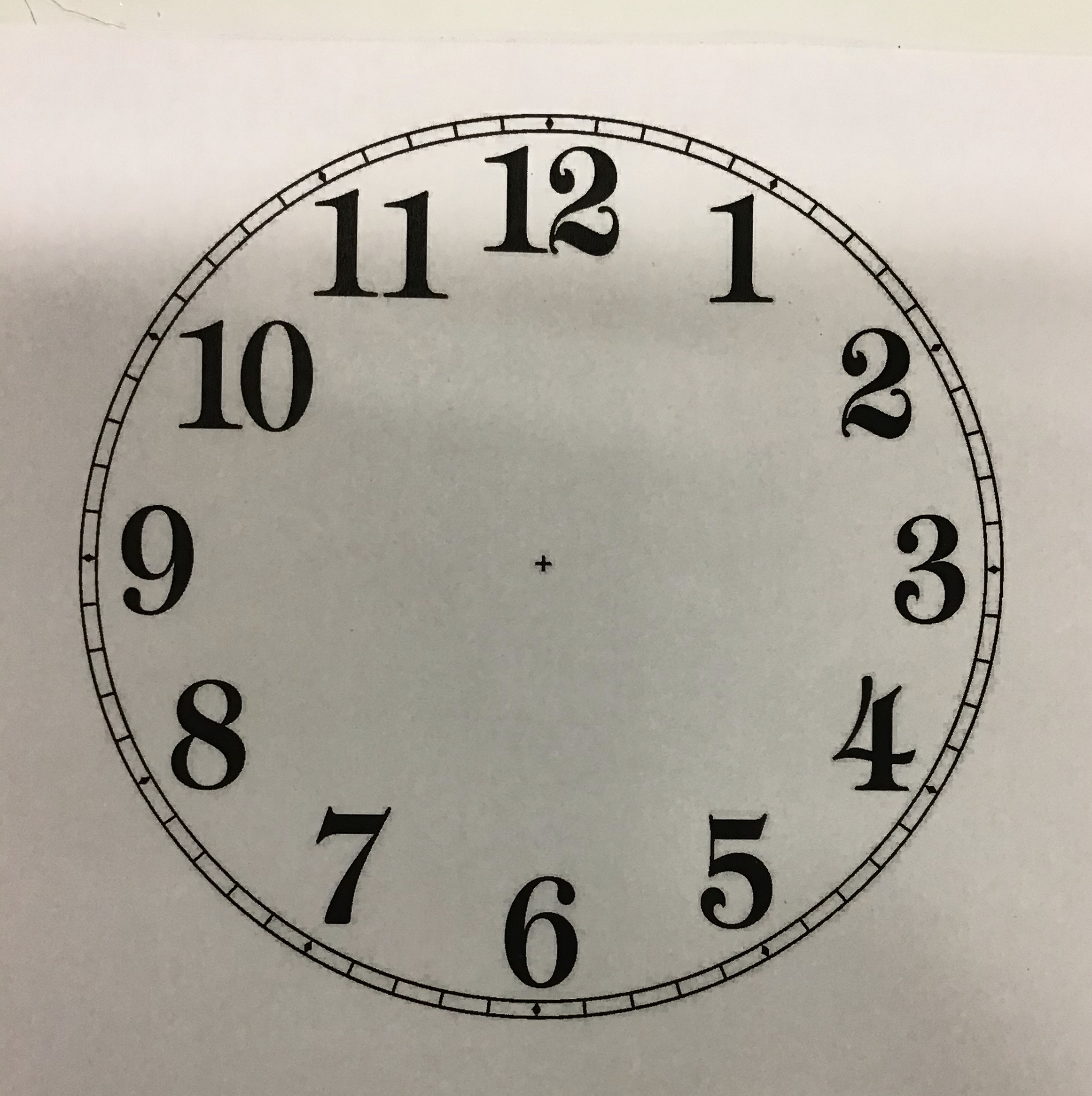
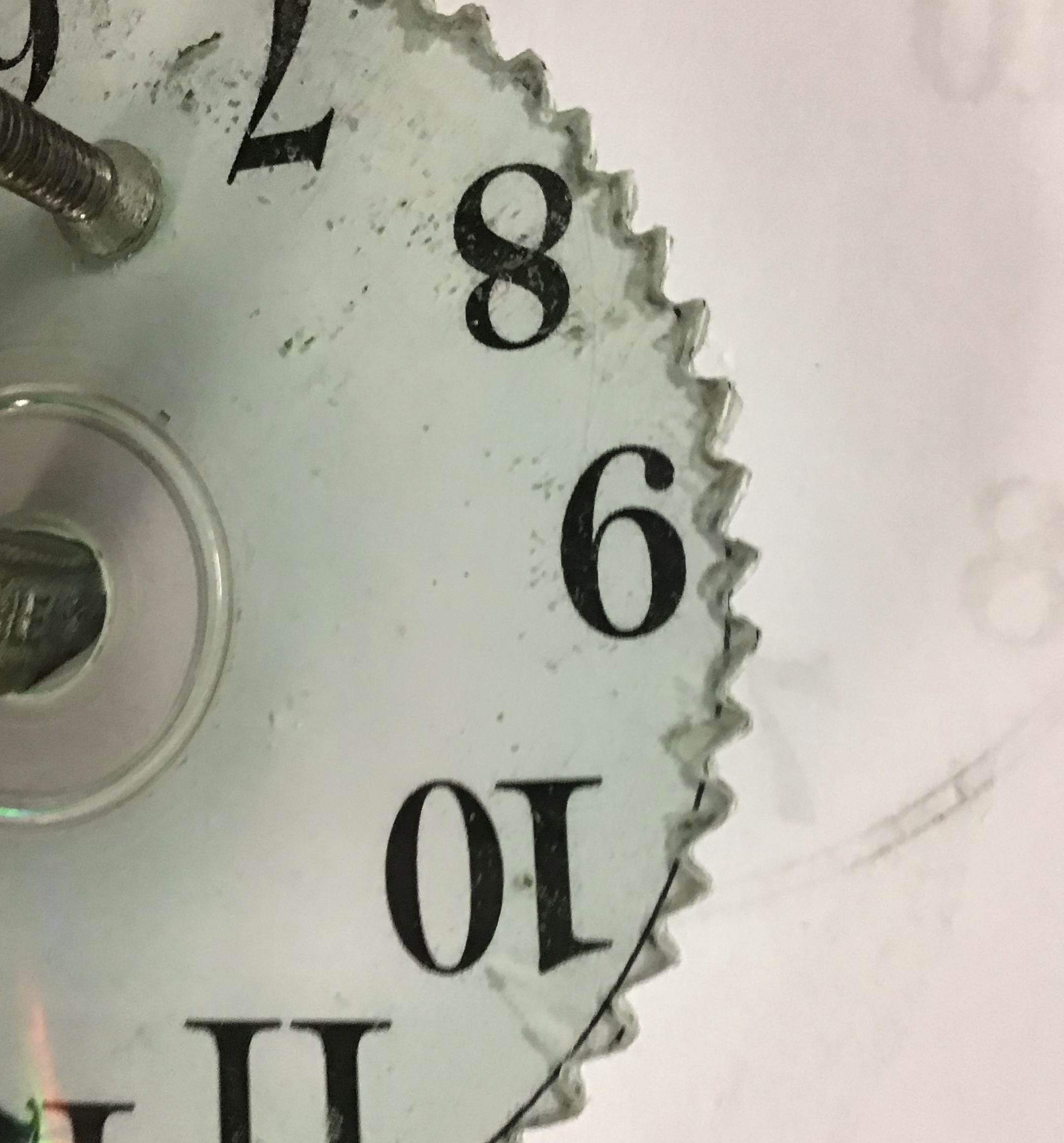
- การขึ้นรูปฟันเฟืองบนตัวซีดี (CD-Chassis Tooth-Profiling): กระบวนการนี้เริ่มจากลอกชั้นฟอยล์สะท้อนแสงออก แล้วใช้ตะไบมือขึ้นรูปฟันเฟืองล็อค (ratchet teeth) ตามที่เห็นในรูป เราจะใช้เทปดึงฟอยล์ออก จากนั้นก็เอาแผ่นซีดีที่ล้างสะอาดแล้วมาคล้องกับแม่แบบหน้าปัดที่ปริ้นท์ไว้ เพื่อใช้เป็นแนวสำหรับตะไบ เป้าหมายคือต้องสร้างฟันให้ได้ 60 ซี่พอดีสำหรับจานนาที และ 12 ซี่สำหรับจานชั่วโมง เพื่อให้ได้มุม "การเกี่ยวฟัน (Pawl-Engagement)" ที่ถูกต้องสำหรับการส่งถ่ายแรงบิดที่เสถียร
- การควบคุมกลไกหน่วงเวลาอย่างประสานกัน (Synchronous Escapement Orchestration): ระบบนี้ใช้เซอร์โวมอเตอร์สองตัวทำงานแยกกัน เราใช้วิธี "พกพาตัวนับ (Carry-Over)" คือเมื่อเซอร์โวตัวนาทีทำงานครบ 60 ครั้ง มันจะส่งสัญญาณให้เซอร์โวตัวชั่วโมงทำงานทีละขั้น ต้องระวังเรื่องความล่าช้าของเวลาระหว่างการกวาดของเซอร์โวแต่ละตัวนะ ไม่งั้นกลไกจะติดขัดได้

วิศวกรรมและการประกอบ
- การปรับค่าและสอบเทียบมุมเซอร์โว (Servo-Angle Interpolation & Calibration): เซอร์โว SG90 ทำหน้าที่เป็นแหล่งกำเนิดพัลส์แบบแกว่งกวัด การปรับค่าใน
Servo.write()ให้ได้ช่วงการ "เดิน (Travel)" และ "รีเซ็ต (Reset)" ที่พอดีเป็นเรื่องสำคัญมาก มันจะช่วยชดเชยความคลาดเคลื่อนจากการตะไบมือของเรา ทำให้แต่ละครั้งที่เข็มขยับหมุนได้ 6° พอดีสำหรับเข็มนาที - วัสดุศาสตร์และการประกอบ (Material-Science & Assembly): ตัวเกี่ยวฟัน (flipper หรือ pawl) ทำจากวัสดุที่มีความยืดหยุ่น เช่น พลาสติก ตามที่เห็นในรูปหนึ่ง "ความแข็งของสปริง (Spring-Rate)" ของมันต้องปรับให้พอดีที่จะขับจานได้ แต่ก็ต้องยืดหยุ่นพอที่จะรีเซ็ตกลับมาได้ด้วย เราใช้กาวติดน็อตไว้ตรงกลางจานให้ได้ศูนย์กลางสูงสุด เพื่อป้องกันการสั่นไหวที่ทำให้เกิดแรงเสียดทาน ซึ่งอาจทำให้เซอร์โวที่มีแรงบิดต่ำหยุดทำงานได้
- การจัดการความแม่นยำของเวลา (Temporal-Stiffness Heuristics): เนื่องจากเราไม่ได้ใช้นาฬิกาจริง (RTC) ระบบจึงพึ่งพา
delay()หรือmillis()ต้องพยายามลดโอเวอร์เฮดของวงจรคำสั่งให้มากที่สุด เพื่อลดการคลาดเคลื่อนของเวลาที่สะสมไปเรื่อยๆ ไม่งั้นบอกเวลาเพี้ยนแน่ ห้ามช็อตนะตัวนี้!


ประกอบชิ้นสุดท้ายและปรับเทียบ
เซอร์โว (Servo) ถูกติดตั้งเพื่อขับเข็มชั่วโมงและเข็มนาที เข็มพวกนี้จะทาสีหรือติดกาวลงบนจานหมุนก็ได้ โค้ดและการต่อสายนั้นง่ายๆ แต่ค่ามุมองศาของเซอร์โวต้องปรับให้เข้ากับการจัดวางกลไกของตัวน้องเองนะตัวนี้ ฟลิปเปอร์ที่ขยับเข็มชั่วโมงก็จะดึงเข็มนาทีให้ขยับไปหนึ่งตำแหน่งด้วย การปรับเทียบขั้นสุดท้ายคือการดูค่าจาก Serial Monitor เพื่อให้ตำแหน่งจานหมุนตรงกับตรรกะในซอฟต์แวร์ ต้องทำให้หน้าปัดที่เห็นตรงกับเวลาที่ตั้งใจไว้ ความแม่นยำของนาฬิกาขึ้นอยู่กับความละเอียดตอนตะไบฟันเฟืองและการตั้งค่าเวลา Delay ของเซอร์โวให้เป๊ะๆ
สรุป
โปรเจกต์ Escapement-Logic นี่คือสุดยอดของ Upcycled Horological Mechatronics เลยนะเว้ย! ด้วยการเชี่ยวชาญ Ratchet-Drive Forensics และ Servo-Escapement Orchestration โปรเจกต์นี้ให้ผลลัพธ์เป็นนาฬิกาไฮบริดกลไกระดับโปรที่ทั้งแข็งแรงและชัดเจน แสดงเวลาออกมาได้เป๊ะเวอร์ผ่านการวินิจฉัยการเคลื่อนไหวที่ซับซ้อน
Mechanical Resonance: Mastering chronometric telemetry through ratchet forensics.