โปรเจกต์นี้มีเป้าหมายในการออกแบบและสร้างอุปกรณ์ที่เชื่อถือได้สูงและใช้งานง่าย เพื่อให้ผู้ใช้สามารถทำงานที่ต้องการได้อย่างมีประสิทธิภาพและมีประสิทธิผล เราใช้ Arduino UNO ในการควบคุมเซ็นเซอร์และอินดิเคเตอร์ทั้งหมดที่ปลายแขนหุ่นยนต์ และใช้โมดูล Wi-Fi เพื่อตรวจสอบอุณหภูมิของชิ้นส่วนที่พิมพ์ 3D และติดตามตำแหน่งบนแกน X, Y, Z ของปลายแขนหุ่นยนต์ Omron แบบร่วมงานผ่านแอปพลิเคชันในมือถือ
Industrial Grade Monitoring for Robotic Automation
เจ้าเครื่องมือ Monitoring ตัวนี้คือสะพานเชื่อมระหว่างความแม่นยำของการพิมพ์ 3D กับระบบอัตโนมัติของหุ่นยนต์ พัฒนาขึ้นมาเฉพาะสำหรับแขนหุ่นยนต์ Omron TM5 แบบร่วมงาน มันให้ข้อมูล Telemetry แบบเรียลไทม์จากปลายแขน (Tool Effector) เพื่อให้แน่ใจว่างานพิมพ์ 3D แบบยาวๆ จะถูกจัดการได้โดยไม่ต้องมานั่งเฝ้าหรือแทรกแซงเองเลย
Multi-Sensor Data Hub
เพื่อให้ได้ความน่าเชื่อถือระดับสูง อุปกรณ์นี้จึงรวบรวมเซ็นเซอร์ระดับมืออาชีพหลายตัวเข้ามา:
- MPU-6050 Accelerometer & Gyro: ติดตามการวางตัวและการเคลื่อนไหวของปลายแขนในพื้นที่ 3 มิติ ข้อมูลนี้ช่วยในการปรับเทียบการเคลื่อนที่ของแขนหุ่นยนต์บนแกน X, Y และ Z
- FSR402 Force Sensor: เซ็นเซอร์แบบฟิล์มบางที่ความต้านทานจะเพิ่มขึ้นเมื่อมีแรงกด ใช้เพื่อตรวจจับแรงจับของปลายแขนเวลาหยิบชิ้นส่วนที่พิมพ์ 3D
- Infrared Obstacle Sensor: ให้ข้อมูลย้อนกลับทันทีว่ามีชิ้นส่วนอยู่ในพื้นที่ทำงานของปลายแขนหรือไม่ ป้องกันการชนหรือการจับที่ล้มเหลว
- ESP-01 (WiFi Module): ชิป Wi-Fi ขนาดกะทัดรัดตัวนี้ทำหน้าที่เป็นสะพานไร้สาย ส่งข้อมูลเซ็นเซอร์ขึ้นคลาวด์ เราใช้ Logic Level Converter ระหว่าง Arduino (5V) และ ESP-01 (3.3V) เพื่อให้การสื่อสารปลอดภัย
Implementation Workflow
ระบบนี้สร้างตรรกะการทำงานบน Blynk IoT framework
- Calibration: ค่าเริ่มต้นจาก MPU-6050 และ FSR402 จะถูกปรับเทียบเพื่อตั้งค่า baseline สำหรับสถานะ "ว่าง" และ "กำลังจับ"
- Wi-Fi Handshake: ESP-01 เชื่อมต่อกับเครือข่ายท้องถิ่นและยืนยันตัวตนกับเซิร์ฟเวอร์ Blynk โดยใช้โทเคนเฉพาะ
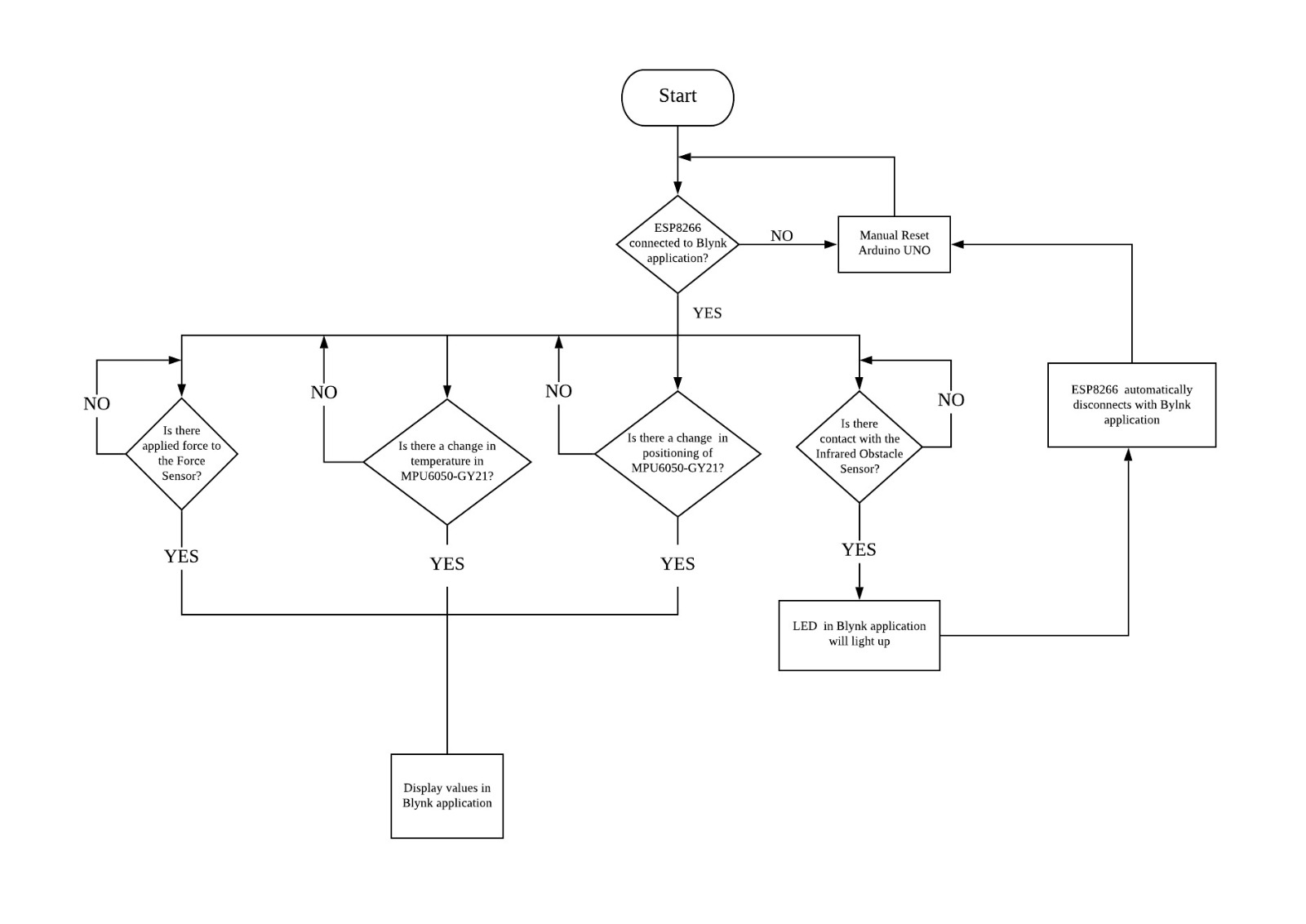
- Continuous Monitoring: Arduino Uno จะดึงข้อมูลจากเซ็นเซอร์ทั้ง 4 ตัวตลอดเวลา ถ้าเซ็นเซอร์ IR ตรวจจับว่าพิมพ์เสร็จแล้ว มันจะส่งสัญญาณให้แขนขยับ จากนั้นแรงจับของแขนจะถูกยืนยันโดยเซ็นเซอร์แรงกด
- Mobile Feedback: วิเจ็ตทั้งหมด 9 ตัวบนแอป Blynk จะแสดงแดชบอร์ดสด แสดงค่า g-force, มุมการหมุน และแรงสัมผัสในปัจจุบัน
สังเกตได้ว่าเวลาที่ใช้ในการพิมพ์วัตถุ 3D ให้เสร็จสมบูรณ์นั้นกินเวลาหลายชั่วโมงหรือแม้กระทั่งหลายวัน ดังนั้น การจะคอยจับวัตถุให้อยู่กับที่ระหว่างพิมพ์และนำออกมาให้พอดีตอนพิมพ์เสร็จด้วยแรงงานคนนั้นเป็นเรื่องยากมาก ในโปรเจกต์นี้ น้องๆ จะพัฒนาระบบการจับและวางวัตถุที่พิมพ์ 3D แบบอัตโนมัติสมบูรณ์ โดยใช้เซ็นเซอร์และอินดิเคเตอร์หลายตัวที่ข้อต่อการหมุนของแขนหุ่นยนต์ TM5 Series ที่มีแกนหมุน 6 แกน
How it works
ตัวจำลองการทำงานมีองค์ประกอบต่างๆ ของมันเองที่คอยตรวจสอบสิ่งต่างๆ รอบตัว
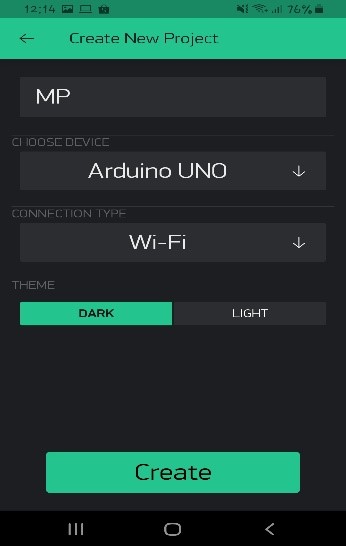
Setting up Blynk
ติดตั้ง Blynk ในสมาร์ทโฟนของน้อง สร้างบัญชีและสร้าง "New Project" ใส่ "Project name" (ตั้งชื่อตามใจชอบ) เลือก Arduino UNO ในส่วน "ChooseDevice" ใน "Connection Type" เลือก Wi-Fi

เมื่อสร้างโปรเจกต์เสร็จแล้ว จะได้รับ Authentication Token ผ่านทางอีเมล ซึ่งโทเคนนี้จะถูกใช้ในส่วนต่อๆ ไปของโปรเจกต์
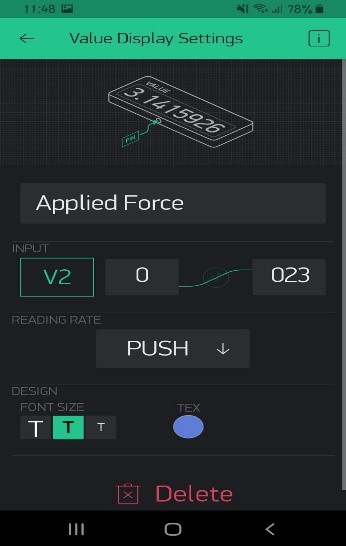
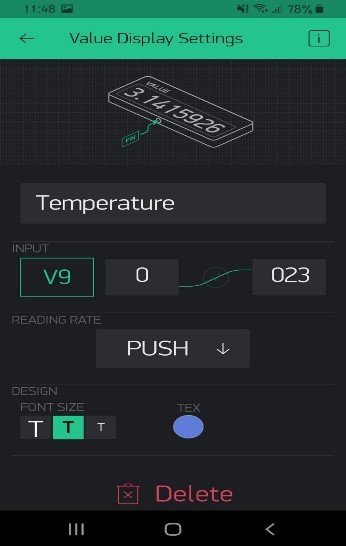
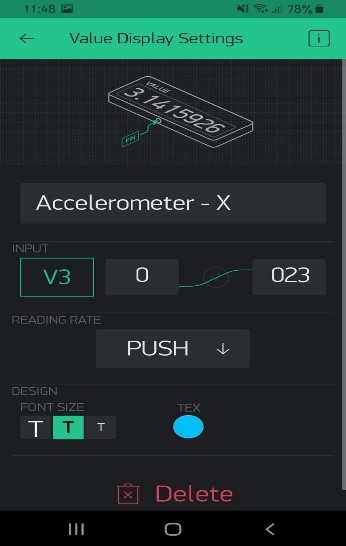
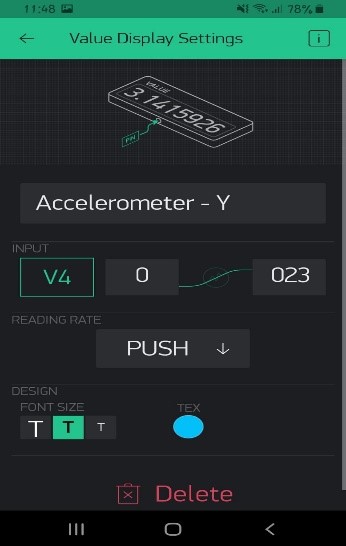
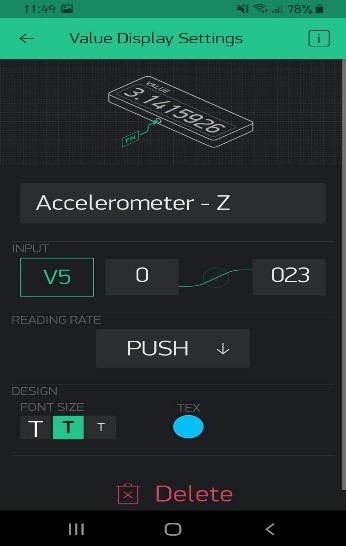
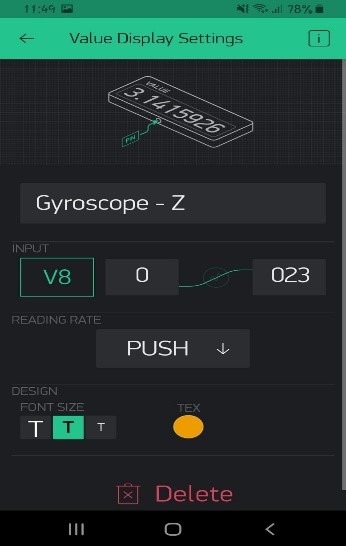
ในหน้าต่างโปรเจกต์ Blynk ของน้อง ให้เพิ่มวิเจ็ตทั้งหมดที่แสดงในแกลเลอรีด้านล่าง โดยคลิกปุ่ม "+" ที่มุมขวาบนของหน้าจอสมาร์ทโฟน โดยรวมแล้วควรมีวิเจ็ตทั้งหมด 9 ตัว น้องสามารถแก้ไขเลย์เอาต์ของหน้าต่างโปรเจกต์ได้โดยกดค้างที่วิเจ็ตแล้วลากไปวาง


เมื่อทุกอย่างเสร็จสิ้น หน้าต่างโปรเจคของน้องควรจะออกมาแบบนี้
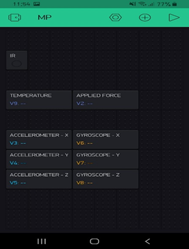
และนั่นแหละสำหรับแอป Blynk ในมือถือของน้องตอนนี้ ไปต่อกัน!
ตั้งค่า ESP8266
เจ้า ESP8266 เนี่ย เปิดกล่องมาใช้ได้เลย แต่ก่อนใช้ เราต้องปรับแต่งนิดหน่อย
ต่อสายให้ ESP8266 ตามรูปด้านล่างนี้เพื่อตั้งค่าให้มัน
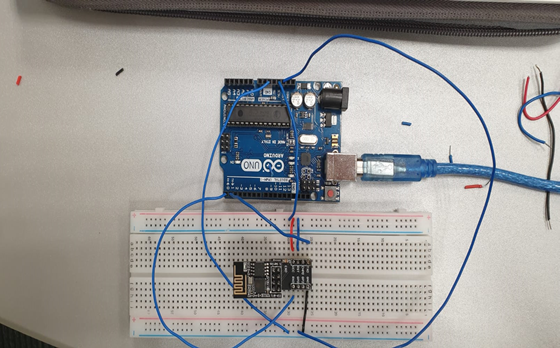
หมายเหตุจากรุ่นพี่
นี่คือวิธีที่พี่ต่อแล้วมันใช้ได้กับพี่นะ ยังมีวิธีอื่นๆ ที่ปลอดภัยในการตั้งค่า ESP8266 ได้อีก ดังนั้น... ทำด้วยความเสี่ยงของน้องเองละกัน!
จบหมายเหตุ
ติดตั้งไลบรารี Blynk
ก่อนที่น้องจะโปรแกรมมันได้ น้องต้องมีไลบรารี Blynk เพิ่มลงในโปรแกรมก่อน มันจะทำให้มือถือ Blynk, ESP8266 และ Arduino ของน้องคุยกันรู้เรื่อง
ดาวน์โหลดไฟล์ zip จากที่นี่
หลังจากดาวน์โหลดมาแล้ว ให้แตกไฟล์ (unzip) ลงไปในโฟลเดอร์ Arduino ของน้อง
ผลลัพธ์
ถ้าน้องทำตามขั้นตอนถูกต้องหมด ในแอป Blynk บนมือถือ น้องควรจะเริ่มเห็นค่าต่างๆ โผล่มาแล้ว
- ถ้าน้องเอามือปิดเซนเซอร์ Infrared Obstacle Sensor น้องควรจะเห็นไฟ LED ติดสว่าง
- ถ้าน้องบีบนิ้วโป้งลงบน Force Sensor ค่าที่ได้ควรจะเพิ่มขึ้นเรื่อยๆ
- ถ้าน้องเอานิ้วปิด MPU 6050 อุณหภูมิควรจะค่อยๆ สูงขึ้น
- และสุดท้าย ถ้าน้องขยับ Breadboard ช้าๆ น้องจะเห็นค่าของ Accelerometer กับ Gyroscope เปลี่ยนไป
(วิดีโอสาธิตอยู่ตรงนี้)
ลองเล่นดูให้หนำใจเลยน้อง! 😊 สู้งานนะ