ชื่อโปรเจกต์: แขนกลที่ง่ายที่สุดในปฐพี (ง่ายจัดๆ เลยน้อง!)
คือตอนที่พี่เพิ่งเริ่มจับพวก [Arduino](https://s.shopee.co.th/7fUgFAWSki) ใหม่ๆ เนี่ย พอของส่งมาถึงหน้าบ้านปุ๊บ พี่ก็อยากจะทำอะไรที่มันดูเท่ ดูคูลทันทีเลยว่ะ ลองเปิด Tutorial ทำตามพวกไฟ LED ไปสองสามอันแล้วมันยังไม่สะใจวัยรุ่นเท่าไหร่ จนพี่ไปเจอคลิปสอนทำแขนกลเข้าให้เลยคิดว่า "เออเนี่ยแหละ ใช่เลย!" แต่ปรากฏว่าลองทำตามกี่ที่ก็พังหมดจนเริ่มหัวร้อน พี่เลยลองศึกษาเรื่องการคุม [Servo](https://s.shopee.co.th/7fUgFAWSki) ด้วย Potentiometer (ตัวต้านทานปรับค่าได้) แทน แล้วก็ค่อยๆ พัฒนาจนกลายเป็นแขนกลกากๆ แต่ใช้งานได้จริงตัวนี้ ซึ่งบอกเลยว่ามันเป็นโปรเจกต์ที่ง่ายที่สุดเท่าที่น้องจะหาทำได้แล้วล่ะ
สำหรับการสร้างโครงสร้างแขนกล พี่แนะนำให้ใช้ไม้ไอติมกับหนังยางไปก่อนนะน้อง ถ้ายังไม่อยากใช้กาวหรือทำอะไรให้มันถาวรมากนัก เผื่อรื้อมาแก้ใหม่ได้ไม่เสียดายของ
รายละเอียดทางเทคนิค (อ่านหน่อยนะวัยรุ่น)
พื้นฐาน Kinetic Geometry
โปรเจกต์หุ่นยนต์ระดับเริ่มต้นตัวนี้ จะทำให้น้องเห็นภาพพื้นฐานการเคลื่อนที่แบบ 3 แกน (3-axis movement) และการทำงานประสานกันของ Servo โดยใช้โครงสร้างทางกลแบบง่ายๆ
- Angular Servo Control: เราจะคุมเจ้า SG90 micro servos 3 ตัว (ตัวฐาน Base, หัวไหล่ Shoulder, และข้อศอก Elbow) โดยที่ Arduino จะทำการแมพ (Map) องศาจาก 0-180 ไปยังตำแหน่งจริงๆ ช่วยให้เราทำภารกิจ "หยิบและวาง" (Pick and Place) ได้แบบเนียนๆ
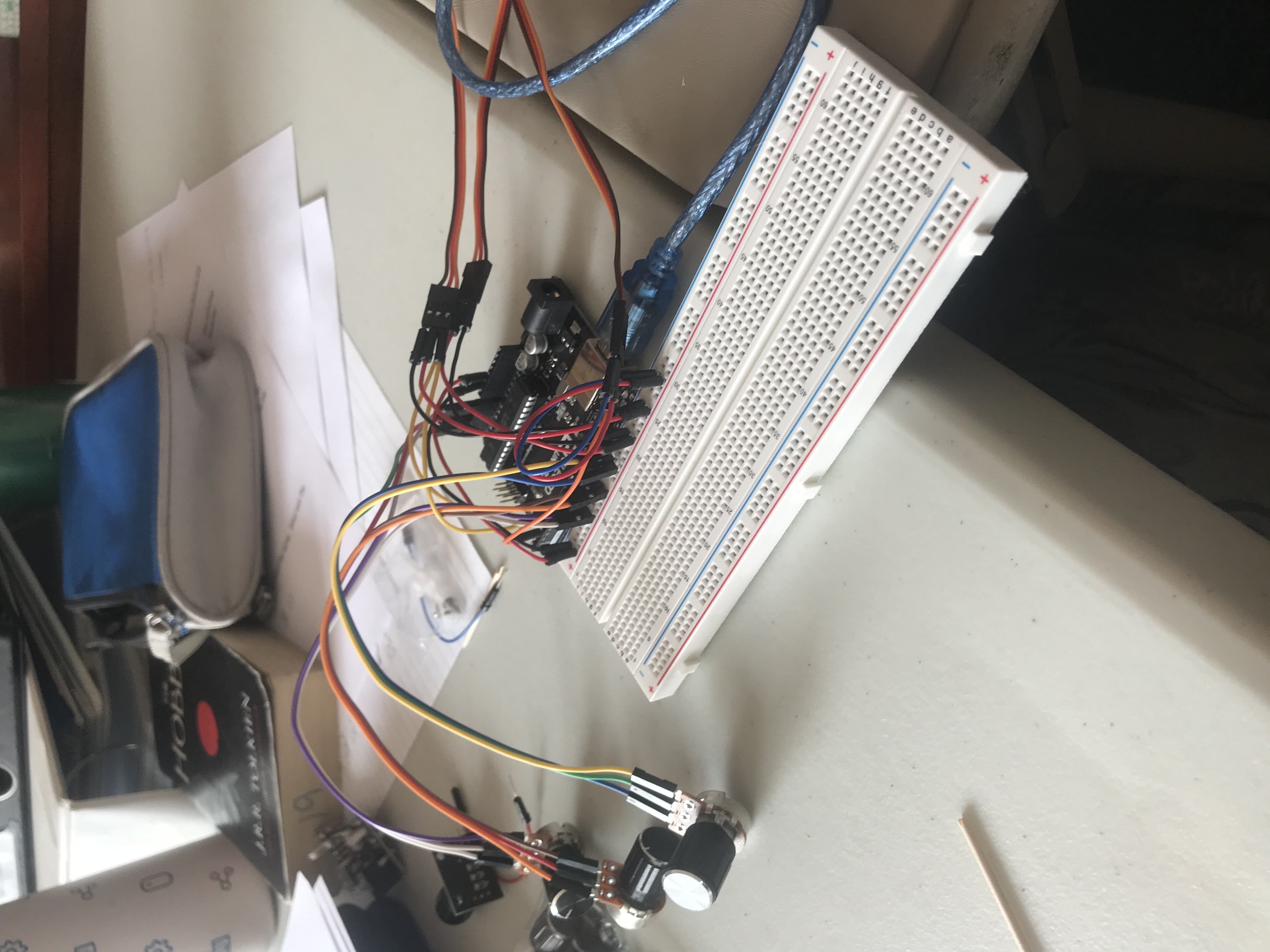
- Mapping Analog Input: (สำหรับสายโหด) เราจะใช้ Potentiometer 3 ตัว มาทำโหมด "Manual Teach" โดยที่ Arduino จะอ่านค่าแรงดัน Analog แล้วสะท้อนการเคลื่อนที่ไปยัง Servo แบบ Real-time ทันที หล่อเท่เลยงานนี้
การประกอบโครงสร้าง
- Simplified Linkage Hub: เน้นโครงสร้างที่มีน้ำหนักเบา จะใช้ 3D-printed หรือกระดาษลังก็ได้ เพื่อลดภาระ (Load) ของ Servo ทำให้หุ่นยนต์ของน้องตอบสนองได้เร็วสะใจ เหมาะสำหรับมือใหม่ที่เพิ่งเริ่มหัดประกอบสุดๆ สู้ๆ นะน้อง ห้ามช็อตนะตัวนี้!