ระบบนำทางอัตโนมัติ: หุ่นยนต์หลบหลีกสิ่งกีดขวาง (Obstacle Avoiding Robot)
เจ้า Obstacle Avoiding Robot เนี่ย บอกเลยว่าเป็นโปรเจกต์ระดับตำนานในโลกของ Arduino Robotics เลยนะน้อง มันคือการรวมร่างกันระหว่างการวัดระยะทาง (Distance Sensing), การตัดสินใจแบบ Logic และการควบคุม Motor เพื่อสร้างเจ้าเครื่องจักรที่ตะลุยโลกกว้างได้ด้วยตัวเองแบบไม่ง้อรีโมท หล่อเท่เลยงานนี้
มันเดิน (หลบ) ยังไง?
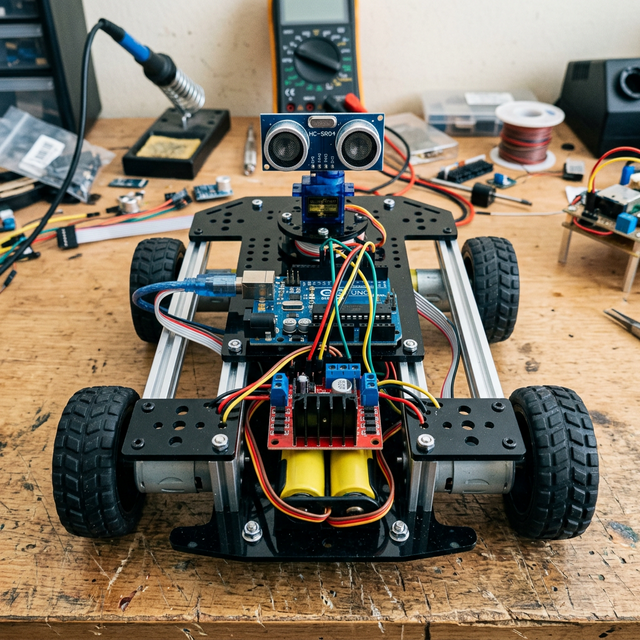
หุ่นยนต์ตัวนี้จะใช้ HC-SR04 Ultrasonic Sensor ติดไว้ที่ด้านหน้า หลักการก็คือมันจะปล่อยคลื่นเสียงความถี่สูงออกไป แล้ววัดเวลาที่คลื่นเด้งกลับมาจากวัตถุ เพื่อคำนวณว่าข้างหน้ามีอะไรขวางอยู่มั้ย
- Scanning: หุ่นจะวิ่งไปข้างหน้าเรื่อยๆ จนกว่า Sensor จะตรวจเจอวัตถุในระยะที่กำหนด (เช่น 20cm)
- Stopping: สั่งเบรกสิรออะไร! หยุดนิ่งๆ ก่อน
- Deciding: มองซ้ายที ขวาที (ส่วนใหญ่เราจะใช้ Servo หมุน Sensor เอา) เพื่อเช็กดูว่าทางไหนมีที่ว่างให้ไปมากกว่ากัน
- Turning: เลี้ยวไปทางที่โล่งที่สุด แล้วก็ใส่เกียร์เดินหน้าต่อเลยวัยรุ่น
อุปกรณ์ที่ต้องใช้ (จัดไปให้ครบนะน้อง)
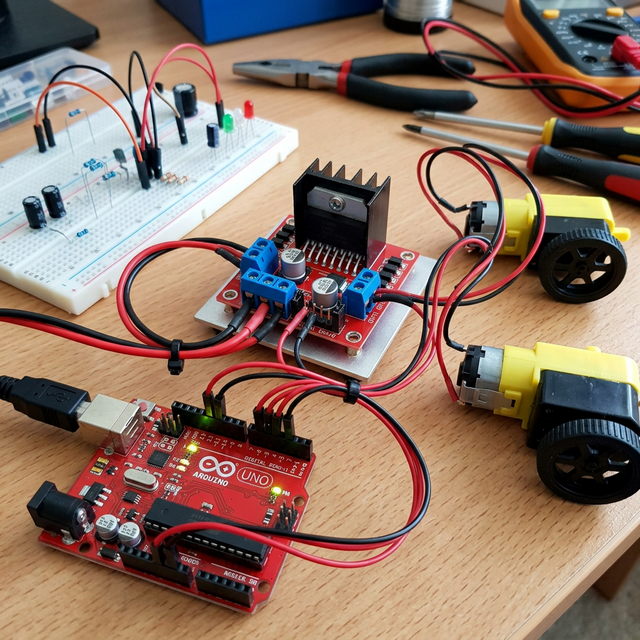
- Arduino Uno: สมองกลหลัก เอาไว้ประมวลผลข้อมูล Sensor และสั่งงาน Motor
- L298N Motor Driver: ตัวเชื่อมต่อระหว่าง Arduino กับ DC Motor แรงดันสูง (ห้ามต่อตรงเข้าบอร์ดนะ เดี๋ยวบอร์ดไหม้!)
- Ultrasonic Sensor (HC-SR04): พี่ตาโตไว้คอยวัดระยะทางกันชน
- SG90 Servo Motor: ไว้ส่ายหัว Sensor สแกนรอบๆ ให้ทั่ว
- Robot Chassis: โครงหุ่นยนต์ที่มีล้อกับ Gear Motors มาให้พร้อมซิ่ง
Logic การเขียนโปรแกรม
Code ของโปรเจกต์นี้จะวนอยู่กับเรื่องง่ายๆ ที่เรียกว่า State Machine โดยปกติมันจะอยู่ในสถานะ "Forward" (เดินหน้า) แต่พอระยะทางมันเหลือน้อยจนถึงจุดวิกฤต มันก็จะดีดเข้าสู่สถานะ "Avoidance" (หลบหลีก) ทันที
การที่เราใช้ Motor Driver อย่าง L298N จะช่วยให้เราใช้ PWM (Pulse Width Modulation) คุมความเร็วหุ่นได้ด้วย จะได้เลี้ยวนุ่มๆ ไม่กระตุกจนหัวทิ่ม โปรเจกต์นี้ถือเป็นบันไดขั้นแรกก่อนที่น้องจะไปทำพวก Autonomous Vehicles หรือหุ่นยนต์ส่งของขั้นเทพเลยนะเนี่ย สู้งานนะน้อง!