Otto: หุ่นยนต์ตรวจจับระยะด้วยคลื่นอัลตราโซนิกและเซอร์โวมอเตอร์ (The Ultrasonic-Servo-Robot)
Otto คือโปรเจกต์หุ่นยนต์ระดับกลาง (Intermediate Project) ที่สร้างขึ้นบนแพลตฟอร์ม Arduino โดยหัวใจสำคัญของมันคือการจำลองการทำงานของระบบเรดาร์พื้นฐาน หุ่นยนต์ตัวนี้จะทำการสแกนพื้นที่โดยรอบแบบพาโนรามา เพื่อวัดระยะห่างระหว่างตัวมันกับวัตถุต่างๆ และส่งข้อมูลกลับมาแสดงผลผ่าน Serial Monitor ในรูปแบบที่เข้าใจง่าย
สำหรับผู้ที่สนใจศึกษาโครงสร้างการทำงานหรือต้องการนำไปพัฒนาต่อ สามารถเข้าชม Source Code และรายละเอียดเพิ่มเติมได้ที่: Official Repository: https://github.com/Fix-22/Otto
ส่วนประกอบและการทำงานเชิงวิศวกรรม
ในการสร้าง Otto เราเลือกใช้ไลบรารีมาตรฐานที่มีประสิทธิภาพสูง 2 ตัว เพื่อควบคุมการทำงานของฮาร์ดแวร์:
- Ultrasonic.h (โดย Erick Simões): ใช้สำหรับการจัดการเซนเซอร์วัดระยะทาง ช่วยให้การอ่านค่าระยะทางในหน่วยเซนติเมตรทำได้แม่นยำและเขียนโค้ดได้สั้นลง
- Servo.h: ไลบรารีมาตรฐานของ Arduino สำหรับควบคุมตำแหน่งของเซอร์โวมอเตอร์ผ่านสัญญาณ PWM (Pulse Width Modulation)
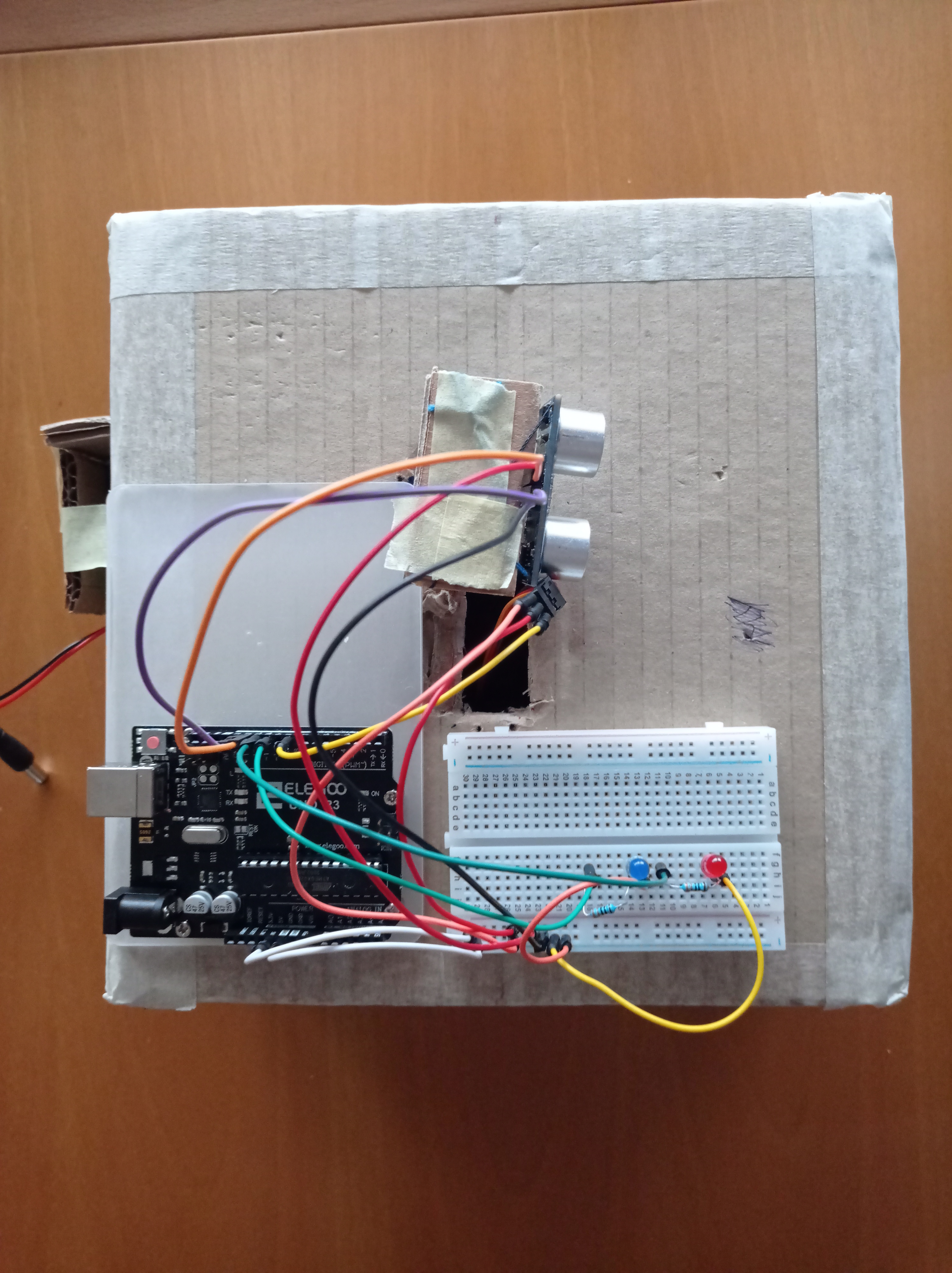
โครงสร้างตัวหุ่น (Mechanical Design): แม้ว่าฐานรองรับและตัวบอดี้ของ Otto จะถูกสร้างขึ้นจาก "กระดาษแข็งรีไซเคิล" (Recycled Cardboard) แต่การออกแบบยังคำนึงถึงหลักสถาปัตยกรรมหุ่นยนต์ โดยมีการแบ่งพื้นที่ด้านข้างสำหรับติดตั้งแบตเตอรี่ภายนอก (External Battery) เพื่อให้หุ่นยนต์สามารถทำงานได้โดยไม่ต้องเสียบสาย USB ตลอดเวลา และภายในโครงกระดาษจะเป็นจุดติดตั้งเซอร์โวมอเตอร์ที่ทำหน้าที่เป็น "คอ" ของหุ่นยนต์เพื่อหมุนเซนเซอร์อัลตราโซนิกไปรอบๆ
จุดกำเนิดของ Otto (The Creation)
Otto ถูกสร้างขึ้นเมื่อวันที่ 1 เมษายน 2021 โดยใช้เวลาพัฒนาเพียงวันเดียวภายใต้แนวคิด "DIY & Fun" แม้วัสดุที่ใช้จะไม่ใช่พลาสติกหรือโลหะที่หรูหรา แต่โครงสร้างกระดาษแข็งที่ถูกออกแบบมาอย่างดีนั้นมีความแข็งแรงเพียงพอที่จะรองรับน้ำหนักของเซนเซอร์และอุปกรณ์อิเล็กทรอนิกส์ทั้งหมดได้
หลักการทำงานและลอจิกการควบคุม (How it works?)
ระบบการทำงานของ Otto ถูกออกแบบมาเป็นแบบ Sequential Scanning หรือการสแกนตามลำดับขั้น โดยมีกระบวนการดังนี้:
- การเคลื่อนที่ (Actuation): เซอร์โวมอเตอร์จะรับคำสั่งให้เคลื่อนที่ไปทีละ 30 องศา เริ่มต้นจาก 0 องศาไปจนถึง 180 องศา
- การวัดระยะ (Sensing): เมื่อถึงตำแหน่งที่กำหนด หุ่นยนต์จะหยุดนิ่งเป็นเวลา 5 วินาที เพื่อให้เซนเซอร์อัลตราโซนิกส่งคลื่นเสียงความถี่สูงออกไปและรอรับสัญญาณสะท้อนกลับ (Time of Flight) เพื่อคำนวณเป็นระยะทาง
- การตอบสนองและแสดงผล (Feedback): ในระหว่างการสแกนแต่ละจุด จะมีการสั่งงานไฟ LED เพื่อระบุสถานะการทำงาน และส่งค่าระยะทางที่วัดได้ออกทาง Serial Monitor
- การหมุนกลับ (Return Path): เมื่อสแกนจนครบ 180 องศา ระบบจะทำการหมุนกลับเพื่อเริ่มรอบการสแกนใหม่
วิเคราะห์ตัวอย่าง Code สำหรับการสแกนที่ 30 องศา:
angle = 0; // กำหนดมุมเริ่มต้น
digitalWrite(led1, HIGH); // เปิดไฟ LED 1 เพื่อแสดงสถานะกำลังปรับมุม
servo.write(angle); // สั่งให้เซอร์โวหมุนไปยังมุมที่กำหนด
delay(100); // รอให้เซอร์โวเคลื่อนที่เข้าสู่ตำแหน่ง
digitalWrite(led1, LOW); // ปิดไฟ LED 1
digitalWrite(led2, HIGH); // เปิดไฟ LED 2 เพื่อแสดงสถานะกำลังวัดระยะ
Serial.print("Distance in cm: "); // แสดงข้อความใน Serial Monitor
Serial.println(ultrasonic.distanceRead()); // อ่านค่าระยะทางจากเซนเซอร์และแสดงผล
delay(5000); // หน่วงเวลา 5 วินาทีเพื่อให้ผู้ใช้สังเกตค่าได้ทัน
จากโค้ดข้างต้น จะเห็นได้ว่า Otto มีการจัดการลอจิกที่ชัดเจน โดยใช้ไฟ LED (led1 และ led2) เป็น Interface พื้นฐานเพื่อบอกสถานะว่าหุ่นยนต์ "กำลังเคลื่อนที่" หรือ "กำลังวัดค่า" ซึ่งเป็นหัวใจสำคัญของการออกแบบ User Experience ในงานด้านหุ่นยนต์
โปรเจกต์ Otto จึงเป็นตัวอย่างที่ยอดเยี่ยมของการนำหลักการ Mechatronics (เครื่องกล + อิเล็กทรอนิกส์ + โปรแกรมมิ่ง) มาประยุกต์ใช้กับวัสดุใกล้ตัว เพื่อสร้างระบบตรวจจับที่ใช้งานได้จริง