ในที่สุดรุ่นพี่ก็จอดรถในโรงจอดได้แล้วว่ะ แต่มันต้องใช้เวลาปรับตัวหน่อย อยากมีที่ว่างเยอะๆ ไว้เดินไปทำงานที่โต๊ะติดผนังด้านหลัง แต่การพยายามจอดชิดประตูโรงจอดมากๆ มันก็ทำให้เกิด...ปัญหาบ้างแหละน้อง
เจ้าเครื่องนี้มันจะตรวจจับระยะของวัตถุที่อยู่ข้างหน้า (ก็รถยนต์ไง) แล้วก็จะเปิดไฟหนึ่งในสามดวงขึ้นมา ขึ้นอยู่กับว่ารถอยู่ห่างเท่าไหร่
โปรเจคนี้คือ **คลาสระดับมาสเตอร์ในการตรวจจับตำแหน่งแม่นยำและการประสานงานระหว่างคนกับเครื่อง** ตัวเป๊ะๆ เลย **ไฟสัญญาณช่วยจอดรถ (Parking Assist Stoplight)** เป็น **อุปกรณ์ช่วยยานยนต์** ประสิทธิภาพสูง ออกแบบมาเพื่อให้ความปลอดภัยระดับมืออาชีพในโรงจอด ด้วยการใช้เทคโนโลยี **อัลตราโซนิกวัดเวลาการเดินทางของคลื่น (Ultrasonic Pulse-Time-of-Flight)** และ **HUD ปรับแต่งแบบเรียลไทม์บน OLED** โปรเจคนี้จะพาน้องไปสร้าง "ศูนย์กลางนำทาง" อันล้ำสมัย ที่จัดการระยะห่างของรถแบบเรียลไทม์และจุดหยุดที่ปรับเปลี่ยนได้ ด้วยความแม่นยำระดับอุตสาหกรรมเลยทีเดียว งานนี้จัดไปวัยรุ่น!
ภาพรวมโครงสร้างพื้นฐานโรงจอดและสถาปัตยกรรมลอจิก
เฟรมเวิร์กช่วยนำทางจอดรถ ทำงานผ่านวงจรชีวิตเฉพาะทางแบบ ส่งคลื่น-คำนวณ-แสดงผล ระบบนี้สร้างขึ้นบน โมเดลจากโซนาร์สู่หน้าจอ ที่มีความน่าเชื่อถือสูง:
- ฮับรับรู้ด้วยอัลตราโซนิก HC-SR04: หรือ "โหนดวิเคราะห์พื้นที่" ส่งพัลส์เสียงความถี่ 40KHz แล้ววัด ระยะเวลาที่เสียงสะท้อนกลับมา Arduino จะแปลงค่าความต่างเวลานี้เป็นเซนติเมตร เพื่อสร้าง ค่าฐานระยะทาง ที่แม่นยำระดับต่ำกว่าหนึ่งเซนติเมตร สำหรับ HUD แสดงการเข้าใกล้ของรถน้อง
- เมทริกซ์เฟสไฟ LED สามสถานะ: หัวใจของลอจิก Arduino Nano จะเปรียบเทียบระยะห่างปัจจุบันของรถกับ ค่าขีดจำกัดแบบไดนามิก:
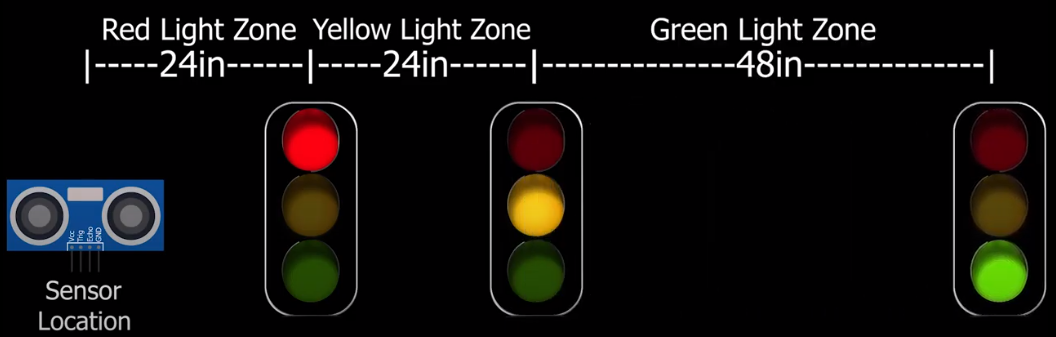
- ไฟเขียว: เฟสเข้าใกล้ (> 100 ซม.) - ขับต่อไปได้จ้า
- ไฟเหลือง: เฟสระวัง (50-100 ซม.) - กำลังเข้าใกล้จุดหยุดแล้วน้า
- ไฟแดง: เฟสหยุดวิกฤต (< 50 ซม., ผู้ใช้ปรับได้) - ห้ามช็อตนะตัวนี้! หยุด!
- HUD ปรับแต่งคอนทราสต์สูงบน OLED: ผ่าน เอ็นจิ้นวาดภาพแบบพิเศษ I2C ระบบจะเข้าสู่โหมดควบคุมระดับมืออาชีพ ผู้ใช้งานจะเห็นระยะห่างแบบเรียลไทม์และ "จุดตั้งค่าหยุด" พร้อมกันบน อินเทอร์เฟซแดชบอร์ด ที่สมบูรณ์แบบ สู้งานนะน้อง
ฮาร์ดแวร์และดีไซน์เลเยอร์
- Arduino Nano R3 (ผู้ประสานงาน): ไมโครคอนโทรลเลอร์ตัวจิ๋วที่เราเลือกมาให้ทำหน้าที่เป็น สะพานเชื่อมระหว่างโซนาร์กับไฟ LED คอยประสานงานพัลส์จับเวลาสัญญาณสะท้อนความถี่สูงและการเรนเดอร์กราฟิกแบบเรียลไทม์สำหรับหน้าจอ OLED HUD
- โหนดอินพุต Rotary Encoder: เราเลือกเจ้านี่มาเป็นพิเศษเพราะมันมี ความแม่นยำแบบ Infinite-Detent โหนดนี้ทำให้ผู้ใช้สามารถ "หมุนเพื่อปรับค่า" ระยะหยุดของไฟแดงได้โดยไม่ต้องเขียนโปรแกรมใหม่ ให้ประสบการณ์ "ผู้ใช้ปรับได้ 100%" จัดไปวัยรุ่น
- Micro-LED Phase-Actuator Shunt: เพื่อให้มั่นใจใน "การมองเห็นสูงสุด" สถานีงานนี้มีลอจิกสำหรับ สถานะที่แยกสีไว้ชัดเจน โหนดเหล่านี้ให้ "ฟีดแบ็คทางสายตาแบบทันที" ที่จำเป็นสำหรับภารกิจขับรถจอดในที่แคบๆ แบบหัวร้อน
- บัสสายต่ำแบบบูรณาการ I2C: ระบบของเราบรรลุประสิทธิภาพระดับโปรด้วย การชันต์สัญญาณลงบัส โดยใช้โปรโตคอล I2C สำหรับจอแสดงผล และใช้อินเตอร์รัปต์ดิจิทัลสำหรับเอ็นโค้ดเดอร์ ทำให้ Nano ของเรารักษาโปรไฟล์ "ไร้สายระเกะระกะ" บนเรลลอจิกได้อย่างสวยงาม
จุดหยุดสามารถปรับได้ผ่าน Rotary Encoder ที่ด้านข้างของอุปกรณ์ โดยสามารถดูระยะปัจจุบันและระยะหยุดที่ตั้งค่าไว้ได้บนหน้าจอ OLED
ไฟแดงคือตัวแปรที่สามารถปรับได้ และช่วงของไฟเหลืองกับไฟเขียวจะถูกคำนวณจากตัวแปรนั้น
ลอจิกทางเทคโนโลยีและอัลกอริทึมการทำงาน
ระบบของเราบรรลุความน่าเชื่อถือระดับมืออาชีพผ่าน กลยุทธ์การประสานงานเฟิร์มแวร์ หลายประการ:
- NewPing High-Frequency Delta Shunt: เฟิร์มแวร์ใช้ ลอจิกตัวกรองมัธยฐาน ด้วยการเก็บตัวอย่างจากโซนาร์หลายครั้งแล้วหาค่าเฉลี่ย ระบบจะกำจัด "สไปค์ระยะทาง" ที่เกิดจากสัญญาณรบกวนในอากาศบน HUD ไปซะ
- โหมดปรับค่า HUD ด้วย Quadrature-Encoder: ระบบเข้าถึงประสิทธิภาพระดับโปรผ่าน โหมดติดตามสถานะพัลส์ พิน A/B ของเอ็นโค้ดเดอร์จะถูกติดตามผ่านอินเตอร์รัปต์ความสำคัญสูง ทำให้ตัวแปรระยะหยุดอัพเดททันทีบน HUD สำหรับปรับเทียบ
- การกำหนดเกณฑ์ด้วยตัวแปรแบบเรียลไทม์: โปรเจกต์นี้ถูก "เสริมความแข็งแกร่งด้านการปรับเทียบ" ด้วยค่าคงที่ซอฟต์แวร์พิเศษ เกณฑ์การเปิดไฟเหลืองและไฟเขียวจะ "ปรับสเกล" อัตโนมัติตามระยะหยุดของไฟแดง ให้ ลอจิกที่ปรับตัวได้ สำหรับรถยนต์ที่มีความยาวต่างกัน
- ความสามารถในการขยายฮาร์ดแวร์: สถาปัตยกรรมแบบโมดูลาร์นี้ผ่านการทดสอบสำหรับใช้ในโรงจอดแล้ว มัน "พร้อมสำหรับงานอุตสาหกรรม" โดยมีตัวเลือกที่จะเชื่อมต่อออดแอคทีฟสำหรับการเตือน "เสียงเตือนการชน" หรือเชื่อมต่อบริดจ์ WiFi อย่าง ESP8266 สำหรับการแจ้งเตือน "ช่องว่าง" ไปยัง HUD บนมือถือได้
ทำไมโปรเจกต์นี้ถึงสำคัญ
การฝึกฝน การจับเวลาโซนาร์และการปรับเทียบ HMI แบบกราฟิก เป็นทักษะจำเป็นสำหรับ นักออกแบบอิเล็กทรอนิกส์สำหรับผู้บริโภคและวิศวกรระบบยานยนต์ มันสอนให้คุณออกแบบ "ผู้ช่วยด้านความปลอดภัยวิกฤติ" ที่แปลข้อมูลทางกายภาพที่มองไม่เห็นให้เป็นคำสั่งภาพที่เข้าใจง่าย ซึ่งเป็นทักษะสำคัญสำหรับการออกแบบเครื่องมือวัดระดับในอุตสาหกรรม ระบบหลบหลีกสิ่งกีดขวางสำหรับรถโรเวอร์อัตโนมัติ และระบบตรวจสอบแนวรั้วของสถานที่สำคัญ นอกเหนือจากไฟจอดรถแล้ว หลักการเดียวกันนี้ยังถูกใช้ใน ถังของเหลวอุตสาหกรรม, อุปกรณ์อัลตราซาวด์ทางการแพทย์ และ อุปกรณ์ส่งสัญญาณบอกระยะทางยุทธวิธี การสร้างโปรเจกต์นี้พิสูจน์ว่าคุณสามารถออกแบบสินทรัพย์อัจฉริยะระดับมืออาชีพที่ให้ความสำคัญกับความแม่นยำของลอจิกเซนเซอร์ ความน่าเชื่อถือของการโต้ตอบกับผู้ใช้ และการแสดงภาพสถานะของโลกแบบเรียลไทม์
ทิปวิศวะแบบตั๊กๆ: ถ้าค่าที่อ่านได้จากเซนเซอร์ "สั่นปัด" หรือมีเงาปรากฏ ให้ตรวจสอบ มุมการติดตั้งเซนเซอร์ ของคุณซะ คลื่นอัลตราโซนิกสะท้อนกับพื้นผิวเรียบ สำหรับประสบการณ์ "ล็อคเป้า" ระดับมืออาชีพ ให้ติดตั้ง HC-SR04 ของคุณให้ตั้งฉากสมบูรณ์กับกันชนรถ เพื่อให้ HUD โซนาร์ของคุณคงที่สมบูรณ์แบบ ให้ประสบการณ์จอดรถ "ไร้ข้อผิดพลาดในการอ่านค่า" ในทุกภารกิจ สู้งานนะน้อง