Video
มุมมองของโปรเจค
Quadcopter นี่แหละคือการสำรวจเทคโนโลยีกลไกและการโต้ตอบแบบอัตโนมัติขั้นสูงเลยทีเดียว เน้นไปที่พื้นฐานสำคัญ—อย่าง OpenPilot Revolution IMU stack และ multi-axis PID feedback logic—น้องจะได้เรียนรู้วิธีสื่อสารและประสานงานภารกิจทางจลนศาสตร์ด้วยซอฟต์แวร์ลอจิกเฉพาะทางและการตั้งค่าที่แรงทะลุปรอท
การลงมือทำจริง: การวัดความเฉื่อยและการสับเปลี่ยนมอเตอร์แบบ Brushless
โปรเจคนี้จะเปิดเผยชั้นลึกลับของการโต้ตอบจากเคลื่อนไหวสู่การบิน:
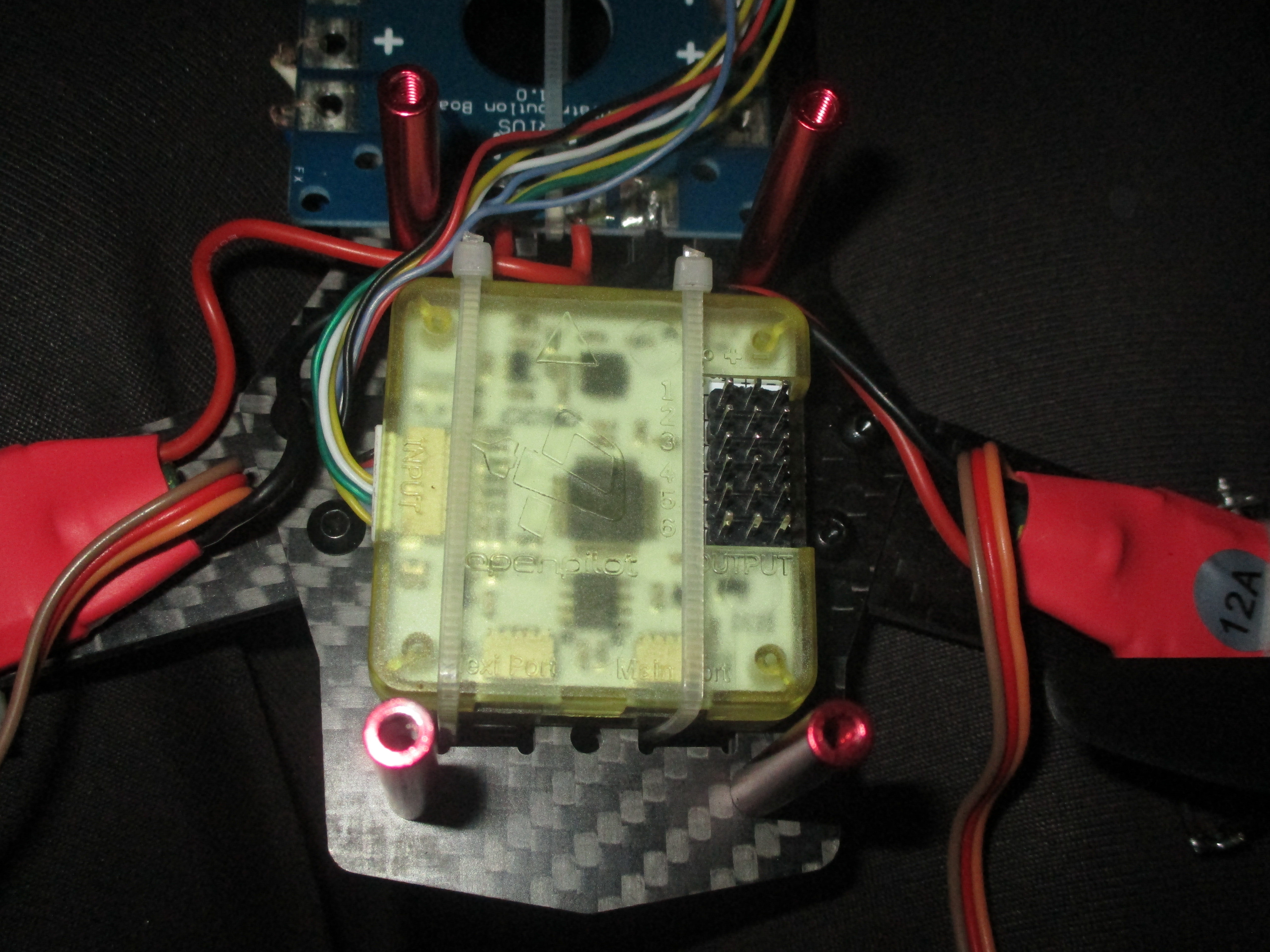
- ชั้นระบุตัวตน: Revolution Flight Controller ทำหน้าที่เป็นดวงตาสำหรับวัดพื้นที่ความละเอียดสูง วัดทุกจุดของมุมออยเลอร์ (Roll/Pitch/Yaw) เพื่อประสานงานภารกิจการผลักดันของมอเตอร์
- ชั้นแปลงสัญญาณ: ระบบใช้พิน PWM ความเร็วสูงเพื่อรับแพ็กเก็ตมอเตอร์ความเร็วสูง เพื่อประสานงานภารกิจการรับรู้ที่สำคัญ
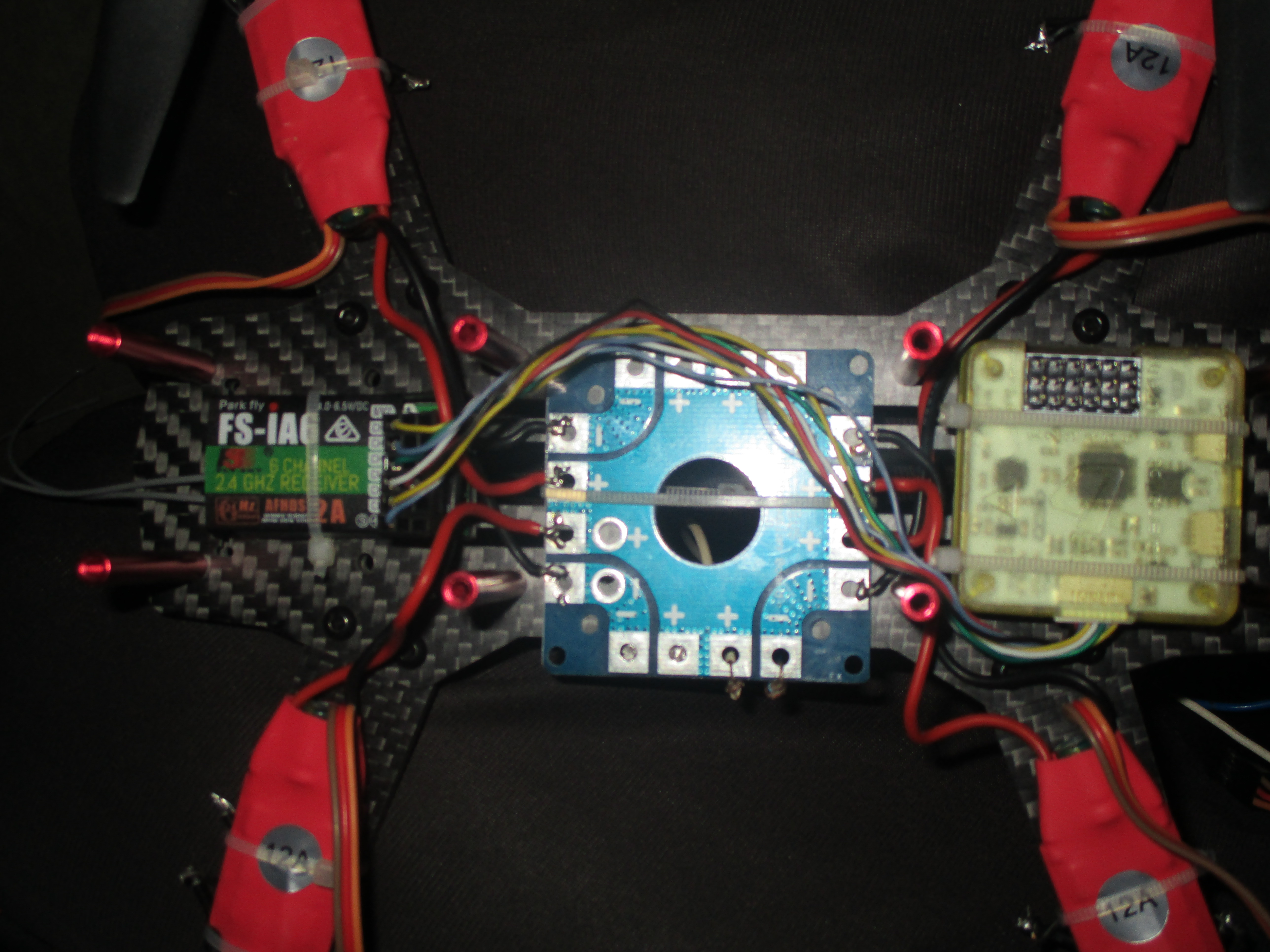
- ชั้นอินเทอร์เฟซโดรน: 450mm X-Frame ทำหน้าที่เป็นแดชบอร์ดภาพและกายภาพความคมชัดสูงสำหรับเช็คสถานะการบินของน้อง (เช่น Armed/Disarmed)
- ชั้นอินเทอร์เฟซควบคุม: ESC 30A ความเร็วสูงให้อำนาจการควบคุมแรงผลักดันด้วยมือ หรือเช็คสถานะอัตโนมัติระหว่างการปรับเทียบเริ่มต้นเพื่อประสานสถานะ
- ชั้นตรรกะการประมวลผล: โค้ด Arduino ใช้กลยุทธ์ "PID-control" (หรือ motor-dispatch): มันตีความข้อมูลไจโรและจับคู่ความเร็วมอเตอร์เพื่อให้การทรงตัวในการบินที่ปลอดภัยและเป็นจังหวะ
- วงสนทนาการสื่อสาร: สตริง Telemetry จะถูกส่งเป็นจังหวะไปยัง Serial Monitor ระหว่างการปรับเทียบเริ่มต้นเพื่อประสานสถานะ
โครงสร้างพื้นฐานฮาร์ดแวร์-หุ่นยนต์
- OpenPilot Revolution: "สมอง" ของโปรเจค จัดการการสุ่มตัวอย่างพื้นที่หลายทิศทางและประสานการซิงค์พัลส์ของ ESC
- Arduino Uno: ให้ "ลิงค์ Telemetry" ที่แม่นยำและน่าเชื่อถือสำหรับทุกจุดของสถานีภาคพื้นดิน
- Brushless Motors: ให้อินเทอร์เฟซทางกายภาพที่มีความจุสูงและน่าเชื่อถือสำหรับ "ภารกิจโดรน" ครั้งแรกที่สำเร็จของน้อง
- แบตเตอรี่ Li-Po: สำคัญมากสำหรับการให้แหล่งพลังงานที่ชัดเจนและประหยัดพลังงานสำหรับแต่ละพัลส์การบิน
- วิทยุส่งสัญญาณ (Radio Transmitter): ให้อินเทอร์เฟซทางกายภาพที่ชัดเจนและเป็นมืออาชีพสำหรับภารกิจทางจลนศาสตร์แต่ละครั้ง และปกป้องชิ้นส่วนภายใน
- สาย Micro-USB: ใช้สำหรับโปรแกรม Arduino และ flight controller ผ่าน system controller
การประกอบ (Making)
กระบวนการควบคุมควอดคอปเตอร์ตัวนี้ ออกแบบมาให้มีประสิทธิภาพขั้นสุด:
- ตั้งค่า Workspace เริ่มต้น: จัดวางมอเตอร์และ ESC ไว้ในโครงให้ถูกต้อง แล้วต่อขา Flight Controller เข้ากับอุปกรณ์ต่างๆ ให้เรียบร้อย
- ตั้งค่า Output Sync: ใน OpenPilot GCS ให้เริ่มต้นอัลกอริทึม
Stabilizationและกำหนดช่อง TX/RX เพื่อประสานสัญญาณวิทยุ - ลูป Internal Dialogue: สถานีควบคุมจะทำการตรวจสอบเชิงเวลาแบบประสิทธิภาพสูงอย่างต่อเนื่อง และอัพเดทสถานะมอเตอร์แบบเรียลไทม์ตามการตั้งค่าพิกัดของน้อง
- บูรณาการ Visual และ Data Feedback: ดูแดชบอร์ดการบินของน้องเปลี่ยนเป็นสัญญาณสถานะเป็นจังหวะ พลิ้วไหวตามการตั้งค่าพิกัดจากระยะไกล




แนวทางการต่อยอด (Future Expansion)
- OLED Identity Dashboard Integration: เอา OLED จอเล็กๆ มาติดบนโครง เพื่อแสดง "Local IP" หรือ "Battery (%)" ดูเท่ห์ดี
- Multi-sensor Climate Sync Synchronization: ต่อ "GPS Module" พิเศษเข้าไป เพื่อให้ทำ "Auto-Level-Home" แม่นยำขึ้นผ่านระบบคลาวด์แบบไร้สาย
- Cloud Interface Registration Support Synchronization: สร้างเว็บแดชบอร์ดเฉพาะทางบนมือถือผ่าน WiFi/BT เพื่อติดตามและบันทึกประวัติการบินทั้งหมดแบบเป๊ะๆ
- Advanced Velocity Profile Customization Support: เพิ่ม "Machine Learning (vCore)" พิเศษลงในโค้ด เพื่อให้ระบบเปลี่ยนทริกเกอร์อัตโนมัติตามความสูงของผู้ใช้! จัดไปวัยรุ่น!
ควอดคอปเตอร์เป็นโปรเจกต์ที่เพอร์เฟกต์สำหรับสายวิทย์ที่มองหาเครื่องมือหุ่นยนต์แบบอินเทอร์แอคทีฟและน่าสนุก!
[!CAUTION] ใบพัดความเร็วสูง นี่อันตรายมาก! ต้องมั่นใจเสมอว่ามี Kill-Switch ผ่านวิทยุที่เหมาะสม และต้องถอดใบพัดออกทุกครั้งตอนทำการสอบเทียบภายใน! ห้ามช็อตนะตัวนี้! สู้งานนะน้อง