
แค่ไม่กี่สัปดาห์ก็ทำได้เยอะเลย ถ้ามีเรซิ่นและความมุ่งมั่นพอกัน รุ่นแรกของรถบังคับ Arduino พิมพ์ 3D ของพี่เสร็จสมบูรณ์แล้ว โปรเจคนี้เริ่มต้นจากที่พี่ไป แฮ็กรถบังคับพังๆ ของลูก ตอนนี้พี่สร้าง RC_Car_RP (Rack And Pinion) ขึ้นมาแล้ว ไฟล์ทั้งหมดของโปรเจคนี้หาได้จาก Github รายการวัสดุและวิดีโอประกอบกำลังจะตามมา
#define projectObjectives;
- ขนาดเล็กกระทัดรัด – เป้าหมายคือต้องพิมพ์รถคันนี้บนแท่นพิมพ์ Elegoo Mars เรซิ่นรุ่นแรกได้ โดยใช้ซัพพอร์ตน้อยที่สุด (หรือไม่ใช้เลย)
- ดีไซน์เรียบง่าย – พี่พยายามลดจำนวนชิ้นส่วนให้เหลือน้อยที่สุด
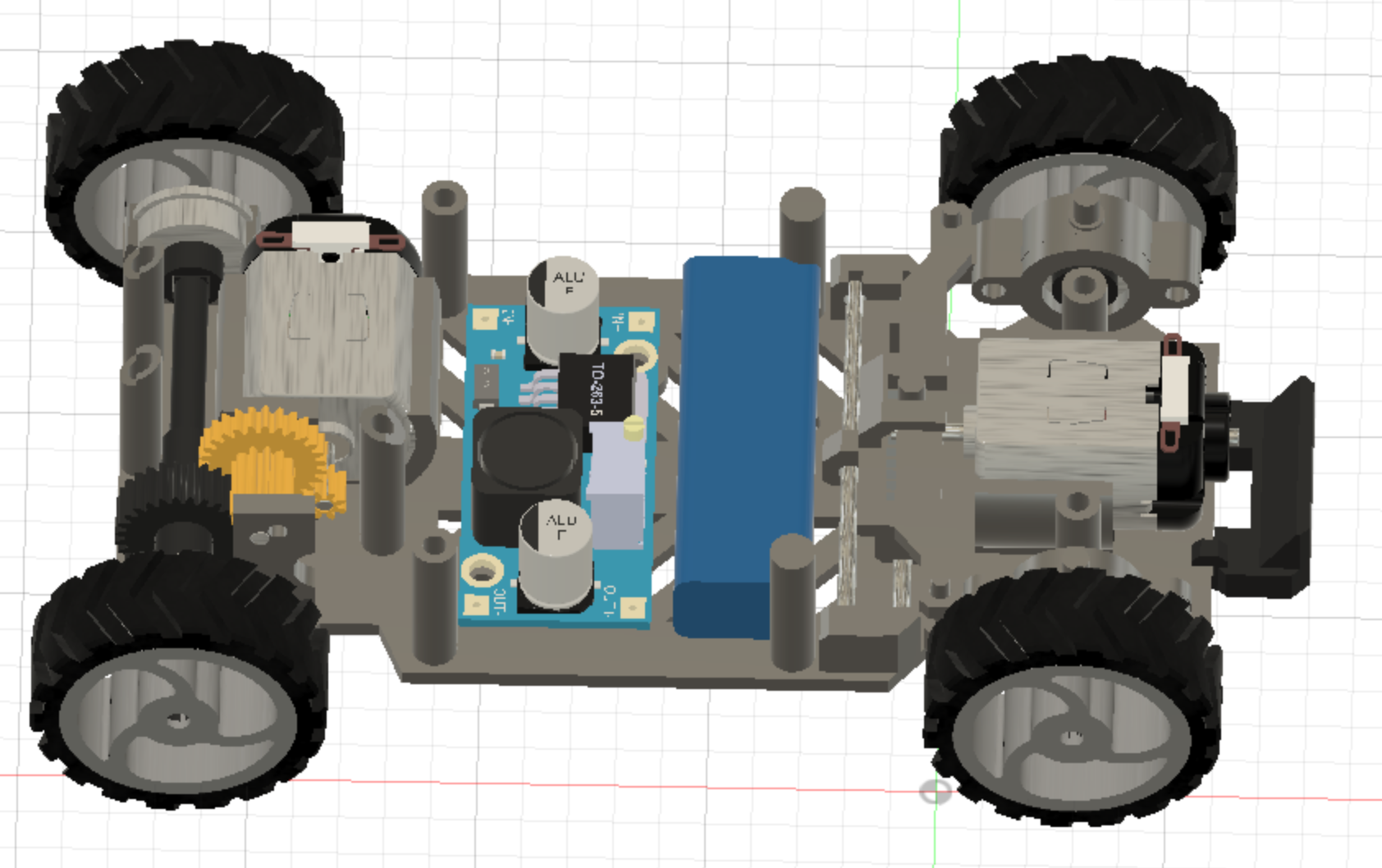
- ชิ้นส่วนและอิเล็กทรอนิกส์ (Arduino) ปรับใช้ได้ง่าย – โปรโตไทป์แรกของพี่วางบนโปรโตบอร์ด 5x7cm แผ่นเดียว รุ่นต่อไป RC_Car_SS จะมีพวงมาลัยแบบเซอร์โว
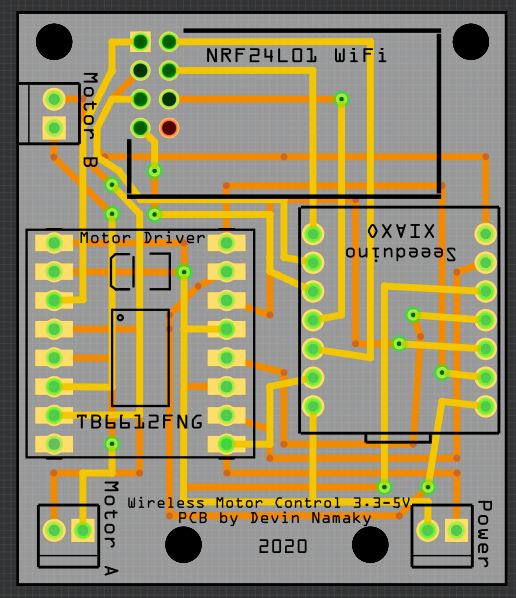
- ประกอบง่าย – เพื่อให้เดินสายง่ายและลดขนาดลงอีก พี่เลยสร้าง PCB สำหรับ RC_Car_RP ขึ้นมา
#define projectConstraints;
- ความกว้างตัวถังรถต้องไม่น้อยกว่า 55 มม. (เพื่อให้ใส่ Seeeduino PCB, โปรโตบอร์ด 5×7, ชุด Double Feather และ Nano breakout ได้)
- ความยาวตัวถังรถต้องไม่น้อยกว่า 110 มม. (ให้มีที่ว่างสำหรับมอเตอร์พวงมาลัย, มอเตอร์ขับเคลื่อนแบบ 130 และพื้นที่เพียงพอสำหรับบอร์ดทั้งหมดที่ว่ามา)
- ชิ้นส่วนทุกชิ้นต้องพิมพ์แบนๆ แล้ววางในพื้นที่แท่นพิมพ์ Elegoo Mars เรซิ่นรุ่นเดิมได้ (สูงสุด = 68 มม. x 120 มม.) หมายเหตุ: ความสูง Z สูงสุดของ Mars คือ 150 มม. แต่เราอยากมีตัวเลือกที่จะพิมพ์ให้แบนที่สุด และจะเลือกทิศทางนั้นเพื่อประหยัดวัสดุ เวลา และลดความล้มเหลวในการพิมพ์ (แม้ว่าพี่จะยอมรับว่าเรากำลังพยายามพิมพ์ด้วยซัพพอร์ตที่มุมประมาณ 20 ถึง 30 องศา ซึ่งจะช่วยลดการบิดงอ)
theController();
รถคันนี้รับสัญญาณจากคอนโทรลเลอร์ ซึ่งพี่ได้รวมดีไซน์ไว้ในโปรเจคบน Github แล้ว และหวังว่าจะได้เขียนโพสต์เกี่ยวกับมันโดยเฉพาะในอนาคต
มีจอยสติ๊กสองอัน ข้อมูลจากจอยสติ๊กสามารถประมวลผลได้หลายวิธี ในเวอร์ชันนี้ แกน Y ของจอยสติ๊กซ้ายควบคุมเดินหน้า/ถอยหลัง และแกน X ของจอยสติ๊กขวาควบคุมซ้าย/ขวา ปุ่มกดบนจอยสติ๊กขวาใช้ควบคุมความเร็วสูงสุดของมอเตอร์ ซึ่งมีประโยชน์เวลาวิ่งในร่ม vs กลางแจ้ง หรือแค่ไม่อยากให้เกียร์พังหรือชนกำแพงเพราะแรงเกินไป ขึ้นอยู่กับชุดจ่ายไฟที่เลือก
theElectronics();
ใช้ Seeeduino XIAO ไดรเวอร์มอเตอร์ TB6612FNG ใช้พิน 0 ถึง 5 บน XIAO ส่วนโมดูล Wireless nRF24L01 SPI อยู่บนพิน 8 ถึง 10 และ CE / CSN คือพิน 6 กับ 7 บน XIAO

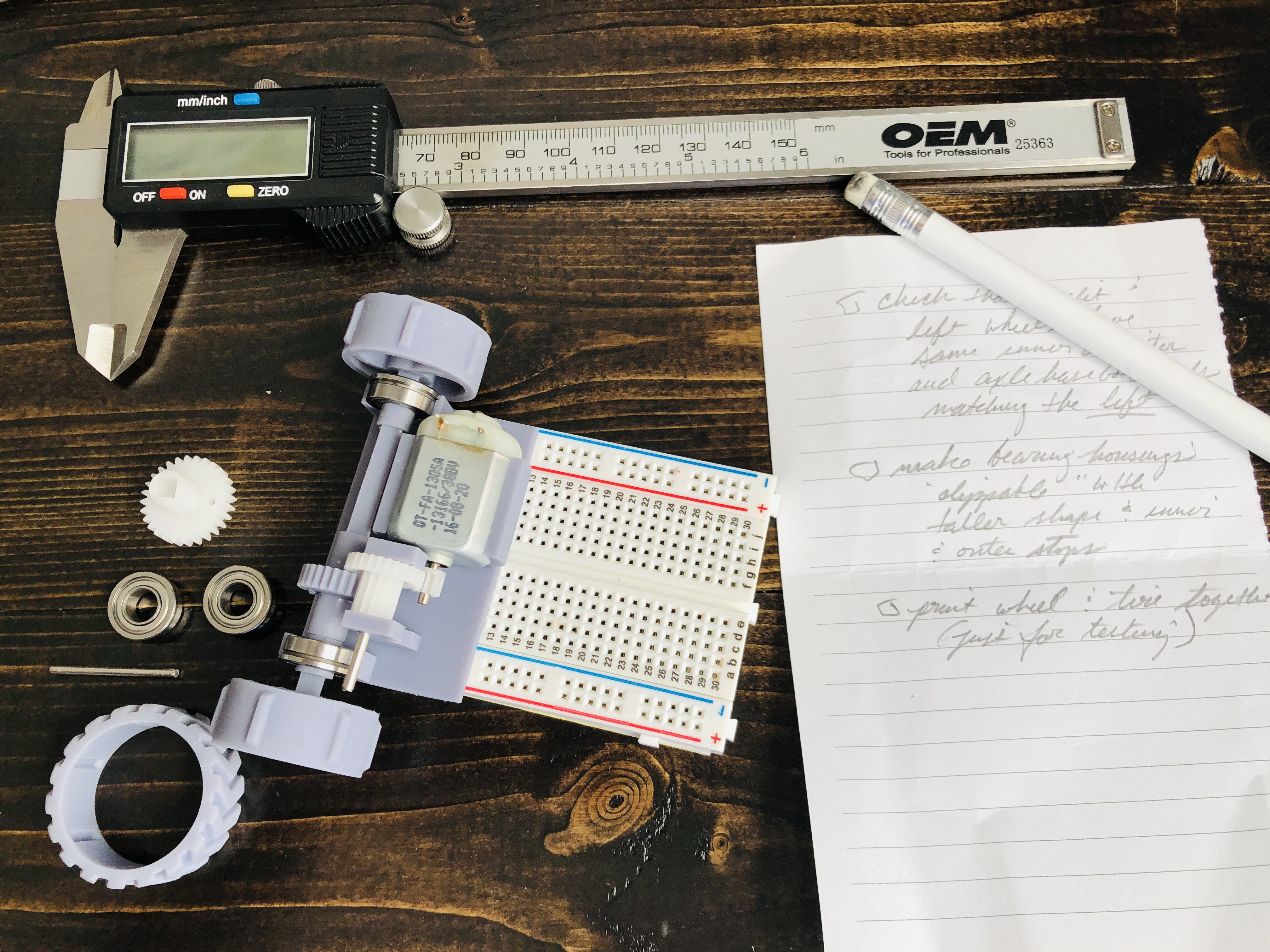
เวอร์ชันนี้ขับเคลื่อนด้วยมอเตอร์ DC แบบฮ็อบบี้มาตรฐาน 130 สองตัว ตัวหนึ่งสำหรับขับเคลื่อน อีกตัวสำหรับพวงมาลัย มอเตอร์ DC สำหรับพวงมาลัยใช้ระบบแร็คแอนด์พินเนียนในเวอร์ชันแรกนี้ ซึ่งทำให้ใช้ชิ้นส่วนฮ็อบบี้ที่หาง่ายและถูกที่สุดได้
ชุดจ่ายไฟคือลิโพ 7.4V ความจุ 300 mAh ซึ่งทำให้แบตเตอรี่วางบนแผ่นล่างพร้อมกับวงจรสเตปดาวน์ได้ แบตเตอรี่ต่อผ่านสวิตช์เปิดปิดไปยัง LM2596 เพื่อลดแรงดันทั้งหมดเหลือ 5V แรงดัน 5V นี้จะถูกแยกสายไปยัง Seeeduino และไดรเวอร์มอเตอร์
ระบบไฟเป็นอีกจุดที่ปรับแต่งได้เยอะมากของรถคันนี้ชัดๆ สำหรับเวอร์ชันหน้า พี่กำลังมองหาวิธีจ่ายไฟให้ทั้งระบบด้วยแบตเตอรี่ AAA รีชาร์จได้ 4 ก้อน ถ้าพี่ใส่ลงไปได้ ซึ่งจะให้แรงดัน 5 โวลต์โดยไม่ต้องใช้สเตปคอนเวอร์เตอร์
rackPinionSteering();
ระบบพวงมาลัยแบบแร็คแอนด์พีเนียนนี่มันหินอยู่นะน้อง ทำยากหลายสาเหตุ แต่หลังจากทำโปรโตไทป์มาเป็นสิบๆรอบ พี่ก็ทำให้มันทำงานได้แล้วล่ะ ระบบนี้ใช้แกนโลหะเส้นผ่านศูนย์กลาง 2 มม. (แบบมาตรฐานที่ขายกัน) 2 เส้นกับสปริง 2 ตัว ฟันเฟืองแร็คจะเลื่อนไปมาตามแกนทั้งสอง ส่วนสปริงจะดันแร็คจากทั้งสองฝั่งเพื่อดันให้มันกลับมาอยู่ตรงกลางเสมอ
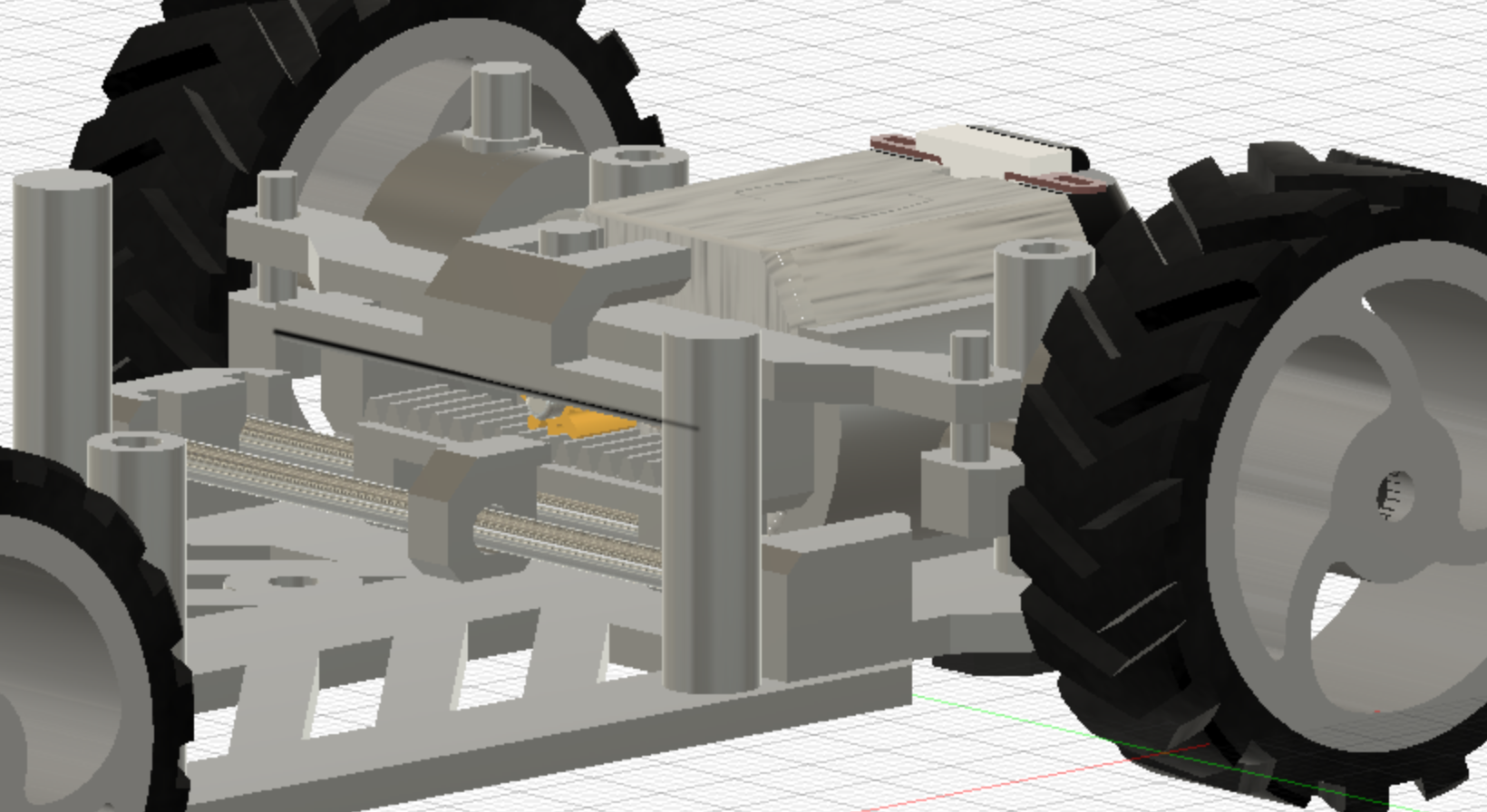
ระบบเกียร์ขับล้อหลังใช้โมดูล 0.5 เริ่มจากเฟืองขับมาตรฐาน 8 ฟันที่มากับมอเตอร์ 130 ทั่วไป เฟืองกลางทำหน้าที่ลดรอบจาก 12 ฟันเป็น 26 ฟัน และเฟืองบนเพลาล้อหลังมี 28 ฟัน เฟืองกลางนี่พี่ใช้พินสั้น 2 มม. มาตรฐานค้ำยันไว้
3DPrinting();
พี่ใช้เครื่องปริ้นเรซิ่น Elegoo Mars รุ่นดั้งเดิมปริ้นชิ้นส่วนรถทั้งหมดเลยนะ อย่าไปเชื่อที่เขาว่ากันล่ะว่าเรซิ่นทำของแข็งแรงไม่ได้ พี่พิสูจน์แล้วว่าทำได้ แถมทำชิ้นส่วนรถได้ด้วย! สำหรับชิ้นส่วนที่ไม่ค่อยรับแรงมาก เช่น สปอยเลอร์ พี่ก็ใช้เรซิ่นมาตรฐานทั่วไป
ส่วนชิ้นที่ต้องแข็งแรงจริงๆ โดยเฉพาะพวกเฟือง พี่มีสองวิธีที่ใช้ได้ผล วิธีแรกคือใช้เรซิ่นแบบ ABS-like ซึ่งก็ใช้ได้ดีอยู่นะ อีกวิธีคือผสมเรซิ่นเพิ่มความแข็งแรงหรือแบบยืดหยุ่นลงไปในเรซิ่นมาตรฐาน พี่พบว่าผสม Sirayatech Tenacious 30% กับ Standard Shine Tough Grey 70% ให้ผลลัพธ์ดีมาก และพี่ชอบวิธีนี้มากกว่า สำหรับการตั้งค่า exposure และ support นั้นใช้ค่าปกติได้เลยถ้าผสม Tenacious ไม่เกิน 30%
สุดท้าย... ยางรถ! พี่ใช้เรซิ่น Wanhao แบบ Rubber-like ข้อดีคือมันสีดำอยู่แล้ว จริงๆ แล้วมันไม่ได้ "เหมือนยาง" ในแง่ความยืดหยุ่นมากนักนะ มันค่อนข้างแข็ง ถ้าพิมพ์หนา แต่ก็ยืดหยุ่นพอที่จะพิมพ์แยกชิ้นแล้วสวมเข้ากับล้อได้ สิ่งที่เจ๋งคือมันให้พื้นผิวสัมผัสเหมือนยางจริงๆ ทำให้มีแรงยึดเกาะและใช้งานได้ดีในที่สุด
เรซิ่น Wanhao นี่พี่ลองผิดลองถูกถึง 4 รอบถึงจะพิมพ์สำเร็จ เพราะไม่มีข้อมูลอ้างอิง สรุปที่ใช้ได้คือตั้งค่า exposure สำหรับชั้นฐาน (bottom layers) เป็น 300% ของค่าปกติ และชั้นอื่นๆ เป็น 400% ของค่าปกติ ส่วนค่าอื่นๆ ที่พี่ใช้: Lift distance 7 มม., Bottom lift speed 25 มม./นาที, Lifting speed 40 มม./นาที, Retract speed 40 มม./นาที

เรซิ่นแบบ rubber-like เนี่ยต้องใช้ support ที่แข็งแรงมาก พี่ต้องเพิ่มเส้นผ่านศูนย์กลางของ support ขนาดกลางเป็นสองเท่า เพิ่มความลึกของจุดสัมผัส และต้องเพิ่ม support ขนาดใหญ่ทั่วทั้งโมเดล พี่คิดว่าถ้าตั้ง support ดีๆ น่าจะลดค่า exposure ลงได้บ้าง แต่โดยรวมการพิมพ์ด้วยเรซิ่นแบบนี้ใช้เวลานานมากเลยน้อง ใจเย็นๆ
Micro-Manufacturing: รถ RC พิมพ์จากเรซิ่น
รถ Arduino ทั่วไปชอบใช้โครงシャassis อะคริลิคบางๆ ที่ซื้อออนไลน์กันใช่ไหมล่ะ แต่เจ้า RC_Car_RP ตัวนี้พี่ยกระดับงานช่างกลด้วยการพึ่งพา SLA Resin 3D Printing ซะเลย เครื่องพิมพ์เรซิ่นใช้แสง UV จับตัวโฟโทพอลิเมอร์เหลว ทำให้เราสร้างชิ้นส่วนกลไกซับซ้อนระดับไมครอนได้ เช่น ระบบส่งกำลังและคันชัก ที่เครื่องพิมพ์ FDM แบบธรรมดาทำไม่ได้
เกียร์และพวงมาลัยแบบ Custom
เพราะเราพิมพ์ชิ้นส่วนด้วยเรซิ่นความละเอียดสูง เราเลยไม่ต้องพึ่งพากล่องเกียร์สำเร็จรูปทั่วไปอีกต่อไป
- เพลาขับ (Drive Axle): เราสามารถพิมพ์ชุดเฟืองท้าย (differential) และเฟืองพีเนียนสเกล 1:12 ได้พอดีเป๊ะ แล้วเอาไปจับคู่กับมอเตอร์เกียร์ DC ความเร็วสูงรุ่น N20 ได้เลย
- ระบบบังคับเลี้ยว (Steering Geometry): รถ Arduino ทั่วไปมักใช้วิธี "ถังหมุน" (เลื่อนไปมา) แต่โปรเจคนี้ใช้ระบบแร็คแอนด์พินเนียนของจริง เหมือนในรูปด้านบน อนาคตอาจจะอัพเกรดเป็น ระบบบังคับเลี้ยวแบบ Ackermann โดยพิมพ์ชิ้นส่วนข้อต่อและคันบังคับเลี้ยวเอง ให้เซอร์โวตัวจิ๋วไปดันระบบเชื่อมโยง เพื่อให้ล้อหน้าหมุนด้วยมุมที่คำนวณได้แม่นยำ จะได้ไม่ลากยางเวลาเข้าโค้งนะตัวนี้!
ระบบควบคุมวิทยุคู่ (Dual-Radio Control System - nRF24L01)
อย่าใช้บลูทูธกับรถ RC สปีดสูงเชียวนะ น้อง! เรนจ์ห่วยมาก โปรเจคนี้ใช้ รีโมทส่งสัญญาณ และ ตัวรับสัญญาณ ที่ฝังอยู่ในตัวถังเรซิ่น สร้างขึ้นจากโมดูล nRF24L01+ 2.4GHz ทั้งคู่เลย
- ตัวส่งจะอ่านค่าจากสติ๊กแอนะล็อก บีบอัดข้อมูลเป็น struct แล้วส่งออกไป
- ตัวรับในรถจะจับข้อมูลนั้นมา แปลงค่าแกน Y เป็น PWM ความเร็วให้มอเตอร์ขับเคลื่อน ส่วนแกน X ก็ไปควบคุมมอเตอร์บังคับเลี้ยว
ขั้นตอนการสร้างและฮาร์ดแวร์
- เครื่องพิมพ์ 3D แบบเรซิ่น SLA (เช่น Elegoo Mars หรือ Anycubic Photon) พร้อมเรซิ่นเกรดวิศวะ
- Arduino Nano (2 ตัว) สำหรับฝั่งส่งและฝั่งรับ (หรือใช้ Seeeduino XIAO แบบที่พี่ใช้ในบิลด์นี้)
- โมดูลวิทยุ nRF24L01+ (2 ตัว)
- มอเตอร์เกียร์เมทัลจิ๋วความเร็วสูง N20 หรือมอเตอร์สไตล์ 130 ทั่วไป คู่กับ ไดรเวอร์ L298N/TB6612FNG
- ไมโครเซอร์โว (SG90) สำหรับเวอร์ชันที่ใช้เซอร์โวบังคับเลี้ยวในอนาคต
kidsLikeIt();
หลังจากที่พี่ออกแบบและสร้างรถ (รวมถึงคอนโทรลเลอร์) ทั้งคันขึ้นมาเอง ความรู้สึกที่ดีที่สุดอย่างหนึ่งก็คือตอนที่เด็กๆ อยากจะมาเล่นกับเจ้าสิ่งนี้จริงๆ นะ วันแรกที่ทดลองขับนี่ฝนตกเลย แต่โหมดขับในร่มก็เวิร์คดีไม่เบา
futurePlans();
หวังว่าพี่จะได้มีเวลาออกแบบรถใหม่ที่ใช้เซอร์โวบังคับเลี้ยว น่าจะทำให้ตัวถังเล็กลงอีกจนใส่แบต AAA ได้ และอาจจะเปลี่ยนไปใช้ระบบ Adafruit Feather
พี่จะเพิ่มรายการวัสดุและวิดีโอประกอบการสร้าง อย่าลืมติดตามอัพเดทได้ที่ Github นะ
View all posts by Devin Namaky