ลงมือประกอบและเขียนโปรแกรมกันหน่อยไอ้น้อง:
วิธีเซ็ตแอป Blynk ให้เท่ระเบิด:
เริ่มจากเปิดแอป Blynk ขึ้นมา แล้วกดสร้างโปรเจกต์ใหม่เลยวัยรุ่น
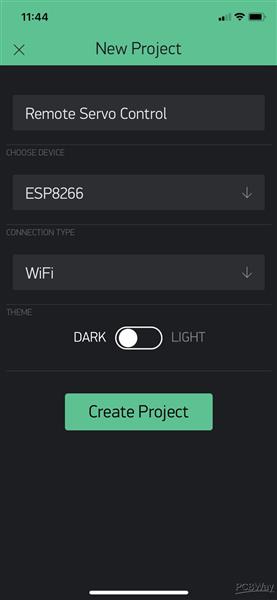
ตั้งชื่อโปรเจกต์ว่า Remote Servo Control ส่วนบอร์ดให้เลือกเป็น ESP8266 และการเชื่อมต่อแบบ WiFi นะน้อง อย่าเลือกผิดล่ะ
พอสร้างโปรเจกต์เสร็จ เดี๋ยวจะมีอีเมลส่ง Auth Token มาให้ เก็บไว้อย่างดีเหมือนสมบัติล้ำค่า เพราะต้องใช้ในโค้ดทีหลัง
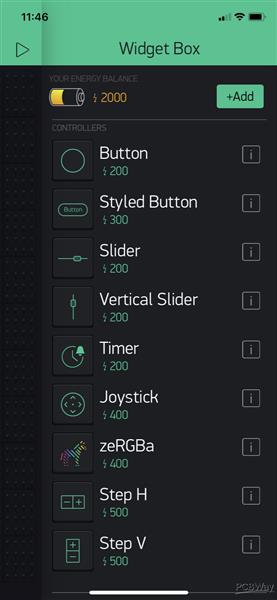
จัด Slider ใส่ลงไปในโปรเจกต์สักตัวซิ
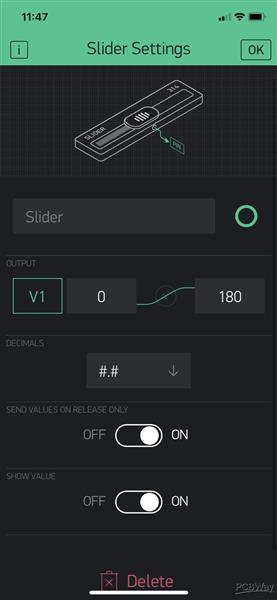
ตั้งค่า Output ของ Slider ให้เป็นขา Virtual 1 (V1) แล้วอย่าลืมแก้ค่าสูงสุดจาก 1023 เป็น 180 ด้วยล่ะ เดี๋ยว Servo จะหมุนจนคอหักเอา
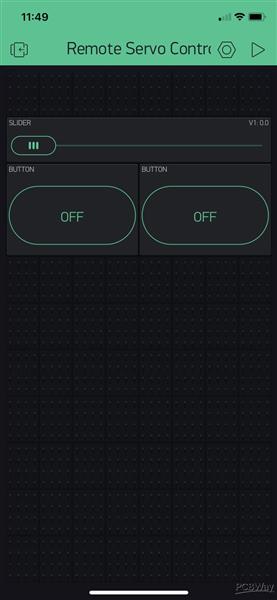
เพิ่มปุ่ม Button ลงไปอีก 2 ปุ่ม จัดวางให้หล่อๆ
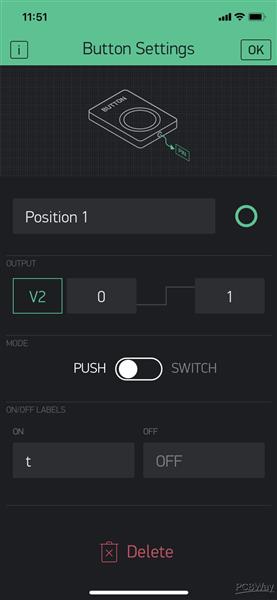
ปุ่มแรกตั้งชื่อว่า Position 1 แล้วเซ็ต Output เป็น Virtual 2 (V2) นะน้อง
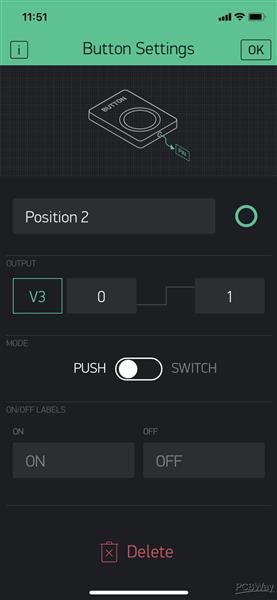
อีกปุ่มชื่อ Position 2 และเซ็ต Output เป็น Virtual 3 (V3) ตามลำดับ
แค่นี้ฝั่งแอปก็เสร็จละ หล่อเท่เลยงานนี้
ส่วนของโค้ด (Code):
มีจุดที่น้องต้องแก้ให้เข้ากับที่บ้านนิดหน่อยโค้ดถึงจะเดิน:
char auth[] = "Blynk Auth Token";
เอา Auth Token ที่ได้จากอีเมลมาวางใส่ในเครื่องหมายคำพูดซะ
char ssid[] = "your ssid";
ชื่อ WiFi บ้านแกชื่ออะไร ก็ใส่ลงไปแทนที่ "your ssid" เลย
char pass[] = "wifi password";
รหัสผ่าน WiFi ก็ใส่ให้ถูก ห้ามลืม " " คร่อมนะ เดี๋ยว Error กระจาย
แค่นี้ก็เรียบร้อย! คราวนี้จะสั่งเปิด-ปิดอะไรที่ไหนก็ได้ในบ้านแล้ว สู้งานนะน้อง!
สั่งทำแผ่นปริ้น (PCB) หรือโหลด Gerber ได้ที่นี่เลย:
รายละเอียดทางเทคนิคแบบจัดเต็ม
ระบบกลไกขับเคลื่อนผ่าน Cloud สุดล้ำ
โปรเจกต์นี้จะทำให้น้องสั่งงานกลไกที่ใช้แรงบิดสูงๆ ผ่านเน็ตจากที่ไหนก็ได้ในโลกด้วยระบบ Blynk
- Direct IoT Servo Mapping: ตัว Arduino จะคอยรับค่า 0-180 องศามาจาก Slider บนแอป แล้ว firmware จะแปลงสัญญาณเป็นค่า PWM ที่แม่นยำ (ประมาณ 500μs - 2500μs) เพื่อสั่งให้ Servo รุ่นมาตรฐานอย่าง SG90 หรือ MG996R หมุนไปตามที่สั่ง
- Real-Time Angle Telemetry: มันยังสามารถส่งค่าตำแหน่ง "เป้าหมาย" เทียบกับ "ตำแหน่งจริง" (ถ้าใช้ Servo แบบ feedback) กลับมาโชว์บนแอปมือถือได้ด้วยนะ จะได้รู้ว่ากลไกขยับไปถึงไหนแล้ว