คลิปนี้จัดเต็มทั้งการออกแบบ ผลิต และโปรแกรมมิ่งพื้นผิวโมดูลาร์ที่ตอบสนองต่อสภาพแวดล้อมได้เลย ตัวพื้นผิวมันจะ "เปลี่ยนรูปทรง" ตามสภาพสังคมรอบข้าง เป้าหมายคือเพื่อเพิ่มประสิทธิภาพการมีปฏิสัมพันธ์กับพื้นที่และยกระดับประสบการณ์ของผู้ใช้งานในอาคาร งานนี้มันเลยไม่ธรรมดา
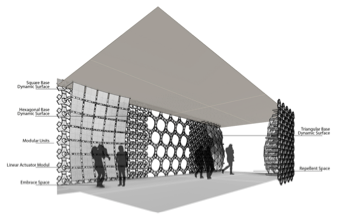
งานนี้เป็นส่วนหนึ่งของการศึกษาเพื่อพัฒนา Dynamic Modular Tessellation (DMT) ซึ่งเอาไปใช้เป็นบล็อกพื้นฐานซ้ำๆ ในการสร้างระบบเปลือกอาคารได้เลย การออกแบบแต่ละโมดูลใช้กลยุทธ์ "ใช้อุปกรณ์น้อยแต่สร้างความหลากหลายได้สูงสุด" เพื่อให้ครอบคลุมการเรียงตัวแบบปกติและไม่ปกติได้หลากหลายแบบ นอกจากนี้ยังพูดถึงโหมดการโต้ตอบของโครงสร้างด้วย เช่น โต้ตอบตามที่ตั้งค่าไว้, ตอบสนองแบบเรียลไทม์, และแบบที่คาดการณ์ล่วงหน้า
มุมมองของโปรเจกต์
reTESSELLATE คือการสำรวจเทคโนโลยีทางสถาปัตย์และการโต้ตอบกับพื้นที่ในระดับสูงมาก โดยโฟกัสที่องค์ประกอบหลักสองอย่าง—เซ็นเซอร์จับภาพ Kinect และ โครงตาข่ายหุ่นยนต์แบบโมดูลาร์ ของเรา—น้องจะได้เรียนรู้วิธีสื่อสารและประสานงานรูปทรงทางสถาปัตยกรรมโดยใช้ลอจิกซอฟต์แวร์เฉพาะทางและการตั้งค่าที่ผสานกับ Rhino อย่างแน่นหนา
การลงมือทำจริง: เรขาคณิตเชิงคำนวณและการตอบสนองแบบไดนามิก
โปรเจกต์นี้เผยให้เห็นเลเยอร์ที่ซ่อนอยู่เบื้องหลังการโต้ตอบระหว่างการเคลื่อนไหวกับโครงสร้างแบบง่ายๆ:
- เลเยอร์ระบุตัวตน: Microsoft Kinect ทำหน้าที่เป็น "ตา" วัดความลึกความละเอียดสูง คำนวณตำแหน่งทุกจุดของผู้ใช้งานในพื้นที่ 3 มิติ
- เลเยอร์แปลงข้อมูล: Arduino Mega ใช้โปรโตคอล Firmata ความเร็วสูงเพื่อรับเวกเตอร์การเคลื่อนไหวจาก Rhino Grasshopper
- เลเยอร์อินเทอร์เฟซ: Firefly for Grasshopper ทำหน้าที่เป็นสะพานส่งข้อมูลความละเอียดสูงสำหรับตรวจสอบสถานะพื้นผิว (การแบ่งย่อย Mesh/ตำแหน่ง Vertex)
- เลเยอร์ขับเคลื่อน: อาร์เรย์ของ Servo Motor ให้การตอบสนองเชิงกลความละเอียดสูงสำหรับการเปลี่ยนแปลงพื้นผิวแบบไดนามิกในแต่ละครั้ง
- เลเยอร์ประมวลผลลอจิก: โค้ดของระบบใช้กลยุทธ์ "reTesselate algorithms" (หรือ modular-morph): มันตีความความใกล้ชิดของผู้ใช้งานและจับคู่กับการหมุนของโมดูล เพื่อให้การตอบสนองทางสถาปัตยกรรมที่ปลอดภัยและเป็นจังหวะ
โครงสร้างพื้นฐานฮาร์ดแวร์-สถาปัตยกรรม
- Arduino Mega 2560: "สมอง" ของโปรเจกต์ จัดการการอ่านค่าจากเซอร์โวหลายทิศทางและประสานข้อมูลจาก Kinect
- Microsoft Kinect: ให้ "ลิงก์การรับรู้" ที่รวดเร็วและน่าเชื่อถือสำหรับทุกจุดของงานติดตั้ง
- โมดูลาร์ยูนิต: ให้ "ผ้าเชิงกล" ที่แม่นยำสูงและน่าเชื่อถือสำหรับภารกิจการตอบสนองแต่ละครั้ง
- Rhino Grasshopper: สำคัญมากสำหรับการให้แพลตฟอร์มการคำนวณเรขาคณิต-ลอจิกที่ชัดเจนและประหยัดพลังงาน
- แหล่งจ่ายไฟ 12V 10A: ให้อินเทอร์เฟซทางกายภาพที่ชัดเจนและเป็นมืออาชีพสำหรับภารกิจของแต่ละเซอร์โว
- สาย USB B: ใช้โปรแกรม Arduino และเป็นอินเทอร์เฟซหลักสำหรับคอนโทรลเลอร์ระบบ
[!IMPORTANT] ต้องใช้ Arduino Mega เท่านั้น ห้ามใช้ Uno นะตัวนี้! เพื่อให้แน่ใจว่ามีพินและหน่วยความจำเพียงพอสำหรับจัดการสัญญาณเซอร์โวเป็นร้อยๆ ตัวจาก Rhino Grasshopper! ไม่งั้นระบบช็อตแน่นอน
Surface Automation and Interaction Step-by-Step
กระบวนการจำลองของ reTESSELLATE ออกแบบมาให้มีประสิทธิภาพสุดๆ:
- จัดตั้งพื้นที่ทำงาน (Initialize Workspace): ตั้งค่า Kinect กับ Arduino Mega บนโครงติดตั้งให้ถูกต้อง แล้วต่อเซอร์โวให้เรียบร้อย
- ตั้งค่าการประสานงานเอาท์พุต (Setup Output Sync): ใน Rhino Grasshopper ให้เริ่มต้นใช้งานคอมโพเนนต์
Fireflyและกำหนดพอร์ต Firmata เพื่อประสานการเคลื่อนไหว - ลูปการสื่อสารภายใน (Internal Dialogue Loop): เมชจะทำการตรวจสอบความลึกแบบประสิทธิภาพสูงอย่างต่อเนื่อง และอัปเดตตำแหน่งเซอร์โวแบบเรียลไทม์ตามการเคลื่อนไหวของผู้ใช้งาน
- การผสานข้อมูลย้อนกลับทางภาพและการคำนวณ (Visual and Computational Feedback Integration): ดูแดชบอร์ดจริงๆ ของคุณและพรีวิวใน Rhino เปลี่ยนเป็นสัญญาณสถานะที่มีจังหวะไปเองอัตโนมัติ พัลส์และตามการตั้งค่าพื้นที่ของคุณจากระยะไกล
การขยายในอนาคต
- การผสานแดชบอร์ดแสดงตัวตนด้วย OLED (OLED Identity Dashboard Integration): เพิ่มจอแสดงผล OLED ขนาดเล็กบนแผงควบคุมเพื่อแสดง "จำนวนจุดยอดที่ทำงาน (Active Vertex Count)" หรือ "อัตราเฟรม (Frame Rate (FPS))"
- การซิงค์สภาพแวดล้อมด้วยเซ็นเซอร์หลายตัว (Multi-sensor Climate Sync Synchronization): เชื่อมต่อ "เซ็นเซอร์อัลตราโซนิก (Ultrasonic Sensors)" พิเศษเพื่อทำการตอบสนอง "ระยะใกล้เฉพาะจุด (Local Proximity)" ที่แม่นยำสูงผ่านระบบคลาวด์แบบไร้สาย
- การซิงค์การสนับสนุนการลงทะเบียนอินเทอร์เฟซคลาวด์ (Cloud Interface Registration Support Synchronization): เพิ่มเว็บแดชบอร์ดพิเศษบนสมาร์ทโฟนผ่าน WiFi/BT เพื่อติดตามและบันทึกประวัติการเคลื่อนไหวทั้งหมดอย่างแม่นยำ
- การซิงค์การสนับสนุนการปรับแต่งโปรไฟล์ความเร็วขั้นสูง (Advanced Velocity Profile Customization Support): เพิ่ม "แมชชีนเลิร์นนิง (vCore)" พิเศษลงในโค้ดเพื่อให้รูปแบบต่างๆ ถูกปรับให้เหมาะสมโดยอัตโนมัติสำหรับการโต้ตอบแบบส่วนตัว
reTESSELLATE เป็นโปรเจกต์ที่เพอร์เฟกต์สำหรับคนรักวิทยาศาสตร์ที่มองหาเครื่องมือทางสถาปัตยกรรมแบบโต้ตอบและน่าสนใจมากขึ้น!