Pseudocode (โค้ดหลอกๆ) คร่าวๆ:
- คำสั่งหยุด 2 แบบ: หยุดเมื่อเจอสิ่งกีดขวาง + หยุดเมื่อกดปุ่มแดง
- ถ้าเงื่อนไขหยุดใดๆ เป็นจริง: หยุด (ถอยหลัง, ปรับตำแหน่งใหม่)
- ไม่งั้น: เดินหน้า
- ฟังก์ชันอื่น: ควบคุมความเร็ว (เขียวเร่ง, เหลืองชะลอ, แดงหยุดและรีเซ็ตความเร็วเป็นค่าเริ่มต้น)
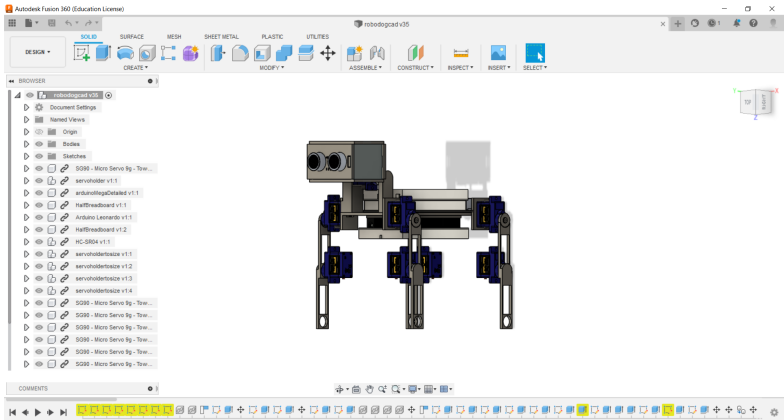
Multi-Legged Kinematics: หุ่นยนต์สุนัขสี่ขา (Quadruped Robo Dog)
รถบังคับ RC ทั่วไปมันอาศัยมอเตอร์ DC ธรรมดาๆ กลิ้งไปตามกฏฟิสิกส์ แต่เจ้า Robo Dog สี่ขานี่มันกลิ้งไม่ได้หรอกน้อง มันต้องสู้กับแรงโน้มถ่วงแบบเรียลไทม์ โปรเจคนี้คือความสำเร็จขั้นเทพในด้านคณิตศาสตร์ Inverse Kinematics (IK) ที่ต้องใช้ I2C Grid 16 ช่องเต็มๆ เพื่อสั่งงานเซอร์โว 8+ ตัวพร้อมกัน ให้เดินเป็นจังหวะ Sine-Wave ที่สวยงามจนตาลาย
The Matrix ของ Inverse Kinematics (IK)
สุนัขมันไม่ขยับสะโพกโดยไม่ขยับเข่านะน้อง ถ้าสะโพกหมุน 10 องศา เท้าจะแกว่งเป็นวงโค้ง ถ้าอยากให้เท้าเคลื่อนที่เป็นเส้นตรงขนานกับพื้น เข่าต้องหมุนตอบโต้พร้อมกันโดยใช้ตรีโกณมิติขั้นสุด!
- Arduino มันไม่ได้แค่ส่งมุมคงที่แบบ
servo.write(90)ธรรมดาๆ - มันคำนวณพิกัดคาร์ทีเซียนที่ต้องการสำหรับเท้า
(X = 10, Y = 0, Z = -15). - ฟังก์ชัน C++
calculateIK()ที่โคตรจะซับซ้อน ใช้ความยาวจริงของกระดูกต้นขาและกระดูกแข้ง (L1, L2) โยนเข้าไปในฟังก์ชันcos()กับsin()! - อัลกอริทึมจะพ่นค่าองศาที่แน่นอนที่สะโพกและเข่าต้องขยับ เพื่อให้ไปถึงพิกัดคณิตศาสตร์นั้นเป๊ะๆ โดยไม่ล้ม!
สถาปนิกพัลส์ PCA9685 I2C
Arduino Uno ธรรมดาๆ ควบคุมเซอร์โว 8 ตัวแบบเนียนๆ ไม่ได้หรอก ตัวประมวลผลจะล่ม แล้วหุ่นยนต์จะพังทลายเป็นกองพลาสติกทันที
- ต้องย้ายภาระการสร้างพัลส์ PWM อันหนักอึ้งไปให้ PCA9685 16-Channel Servo Driver Board จัดการแทน
- Uno คุยกับมันผ่านพิน I2C สองขา (
A4, A5) - มันส่งคำตอบ IK ระดับสูงผ่านไลบรารี
<Adafruit_PWMServoDriver.h>! pwm.setPWM(leg1_Hip, 0, calculatedIKAngle);- ชิป PCA เจ้าเฉพาะทางจะจัดการพัลส์ไฟฟ้าที่น่ากลัวนี้อย่างอิสระ ทำให้ Uno สามารถเริ่มคำนวณมิลลิวินาทีถัดไปของจังหวะการเดินได้ทันที!
การเซ็ตอัพระบบอุตสาหกรรมสำหรับ Quadruped
- Arduino Mega หรือ ESP32 (การคำนวณตรีโกณจะบดขยี้สถาปัตยกรรมความจำของ Uno เรียบร้อย!).
- PCA9685 16-Channel PWM Module.
- เซอร์โว MG996R เกียร์โลหะหนัก 8 หรือ 12 ตัว (เซอร์โวพลาสติก SG90 จะหักทันทีที่พยายามยกหุ่นยนต์พลาสติก 2KG).
- เครื่องพิมพ์ 3D (สำคัญมากสำหรับการสร้างกระดูกต้นขาและแข้งที่มีความยาวแม่นยำทางคณิตศาสตร์ เพื่อให้สมการ IK ทำงานได้).
- Step-Down Buck Converter ขนาดใหญ่ (เช่น 20 แอมป์) เพื่อลดแรงดันจากแบตเตอรี่ LiPo 3S ลงมาที่ 6.0V อย่างปลอดภัย ถ้าข้ามขั้นนี้ไป เซอร์โวทุกตัวบนโครงจะระเบิดเป็นประกายไฟแน่นอน อย่าลอง!