ชื่อโปรเจกต์: หุ่นยนต์เตะกระป๋องน้ำอัดลม (โคตรตึง!)
หุ่นยนต์ตัวนี้สร้างขึ้นมาเพื่อลงสนามแข่งโดยเฉพาะเลยน้อง ภารกิจคือต้องกวาดไอ้เจ้ากระป๋องน้ำอัดลมขนาด 355 ml ให้ออกจากสนามวงกลมให้เกลี้ยง
ตัวหุ่นยนต์จะถูกวางไว้ตรงจุดศูนย์กลางเป๊ะๆ แล้วก็จะมีกระป๋องน้ำอัดลม 10 ใบวางเรียงรายอยู่รอบตัวมัน เหมือนในรูปข้างล่างนี่แหละ:
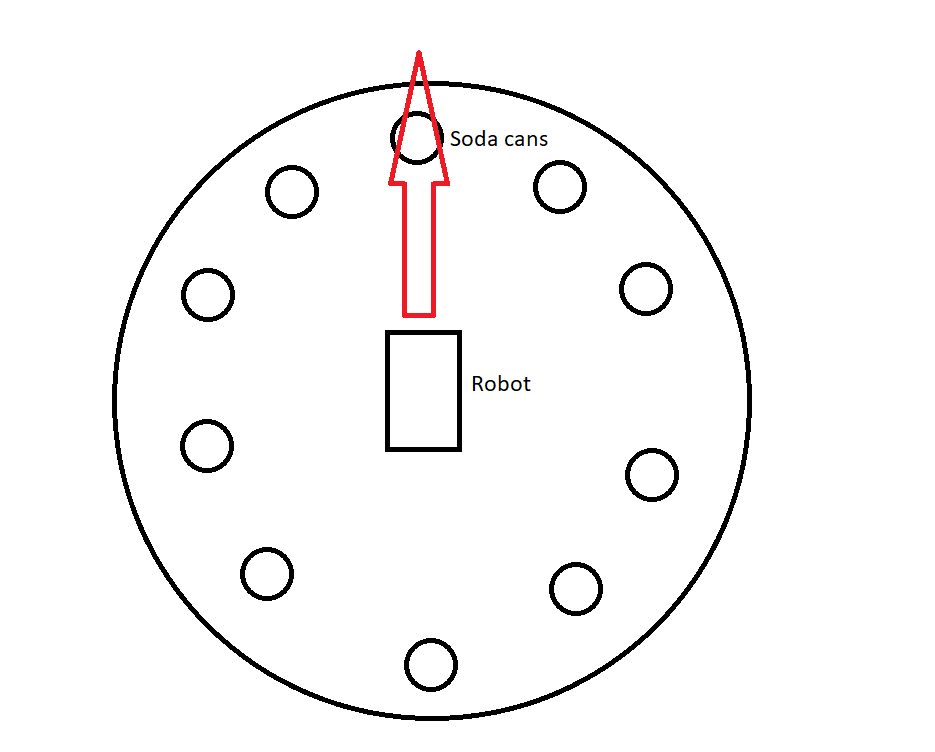
เป้าหมายคือต้องเตะไอ้กระป๋องพวกนี้ออกนอกวงกลมให้เร็วที่สุดเท่าที่จะทำได้ เอาแบบติดเทอร์โบไปเลยวัยรุ่น!
เจาะลึกความเทพทางเทคนิค
ระบบจลนศาสตร์หุ่นยนต์แบบโต้ตอบ (Interactive Kinetic Robotics)
โปรเจกต์นี้โคตรมันส์และน่าลองมาก เพราะเราจะได้ใช้พวก Mechanical Actuator มาทำงานทางกายภาพแบบ High-speed ให้เห็นกันจะๆ
- ชุดลั่นไก Solenoid หรือ Servo แรงบิดสูง: หุ่นยนต์ตัวนี้จะใช้ Ultrasonic Sensor คอยส่องหาเป้าหมายในระยะ "Impact Zone" พอเจอพิกัดปุ๊บ Arduino ก็จะสั่งการให้ MG995 Servo ความเร็วสูง หรือ Solenoid 12V ดีดกระป๋องกระเด็นหายวับไปกับตา หล่อเท่เลยงานนี้
- ระบบคำนวณจังหวะการชน: ตัว Firmware จะคอยคำนวณเวลา "Retraction" หรือการดึงกลไกกลับ เพื่อให้มั่นใจว่าขาเตะพร้อมฟาดกระป๋องใบต่อไปได้ทันท่วงที อารมณ์เหมือนหุ่นยนต์คัดแยกสินค้าในโรงงานระดับโปรเลยนะน้อง สู้งานนะเราน่ะ
ขุมพลังงาน (Power Hub)
- ระบบป้องกันไฟย้อน L298N: เราใช้ H-bridge มาจัดการกับกระแสไฟมหาศาลที่ตัวเตะดึงไปใช้ เพื่อให้ส่วน Logic ของ Arduino ยังทำงานนิ่งๆ ไม่เอ๋อตอนที่กระแสไฟพุ่งปรี๊ด (Current Spikes) จังหวะที่เตะอย่างแรง... บอกเลย ห้ามช็อตนะตัวนี้!