ชื่อโปรเจกต์: Robotic arm 2 axeled
แขนกล (Robotic arm) เนี่ย ในโรงงานเค้าใช้กันเพียบเลยน้อง พี่เลยตัดสินใจจัดให้แบบแจ่มๆ โดยใช้ [Servo](https://s.shopee.co.th/7fUgFAWSki) 2 ตัวพอ ตัวนึงติดไว้ฐานข้างล่างให้หมุนได้ 180 องศา ส่วนอีกตัวติดไว้ข้างบนเอาไว้โยกซ้ายขวาฝั่งละ 90 องศา งานนี้พี่ใช้กาวมหาอุดสูตร Resin & Hardener ผสมกัน บอกเลยว่าถูกและดี ติดทีนี่แน่นปึ้ก ข้อต่อแข็งแรงสุดๆ ห้ามดึงเล่นเชียวนา!
อะ จัดไปวัยรุ่น นี่คือรูปวิธีตัดกระดาษ Cardboard เอาให้เป๊ะนะน้อง
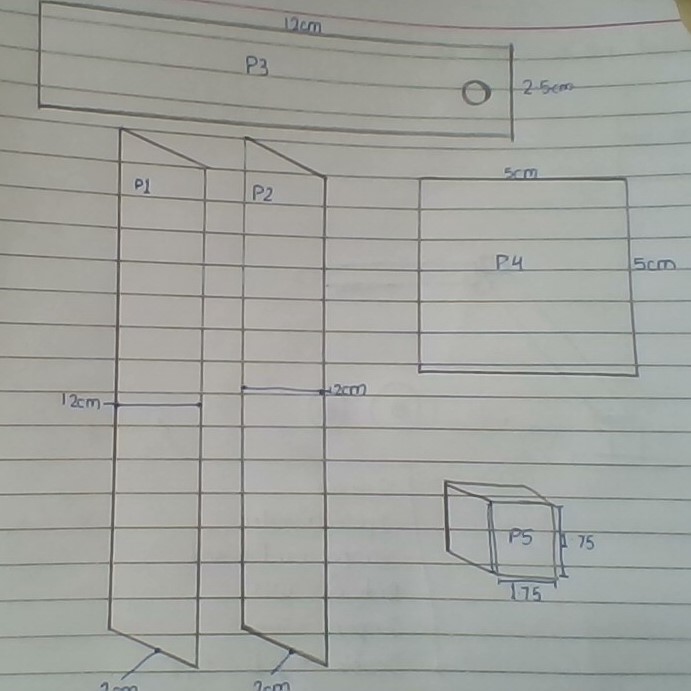
อีกอย่างที่สำคัญคือการประกอบร่างแขนกลของเรา ดูตามรูปนะ เอา Servo ตัวบนยึดเข้าระหว่างส่วนบนของ p1 กับ p2 พอเสร็จแล้วก็เอา p3 ไปติดเข้ากับ Nob ของ Servo ตัวบน จากนั้นตัดโฟม (Thermocole) ให้ได้ขนาดเท่า p5 แล้วยัดลงไประหว่างฐานของ p1 กับ p2 เสร็จแล้วก็ติดโฟมเข้ากับ p4 และสุดท้ายเอา p4 ไปเสียบเข้ากับ Nob ของ Servo ตัวล่าง เป็นอันจบพิธี
หน้าตาข้อต่อจะออกมาประมาณนี้ -

หวังว่าจะเคลียร์นะน้องว่าแต่ละชิ้นมันประกอบร่างกันยังไง รูปแรกพี่สอนวิธีตัดไปแล้ว ส่วนรูปนี้โชว์ให้เห็นจะๆ ว่าการเชื่อมต่อกันระหว่าง p1, p2, p3, p4, p5, Servo ตัวล่าง และ Servo ตัวบน มันเป็นยังไง
ย้ำอีกทีนะวัยรุ่น ทุกชิ้นส่วนเชื่อมกันด้วยกาว Resin-Hardener สูตรเข้มข้น จัดให้แน่น!
ทำโปรเจกต์มาแทบตาย ถ้าไม่มี Output มาโชว์หล่อก็เสียของ อะ ดูวิดีโอตอนมันทำงานซะ -
ที่เหลือก็ขอให้สนุกนะน้อง!
ข้อมูลทางเทคนิคจัดเต็ม (EXPANDED TECHNICAL DETAILS)
Dual-Axis Kinematics (จลนศาสตร์แบบ 2 แกน)
เจ้าแขนกล 2 แกนตัวนี้เหมาะมากสำหรับน้องที่เพิ่งเริ่มศึกษาเรื่องการควบคุมการเคลื่อนที่ตามพิกัด
- Servo Configuration: เราใช้ High-Torque Servo 2 ตัว ทำหน้าที่เป็น "Base" (Yaw) และ "Shoulder" (Pitch) คุมด้วยสัญญาณ PWM เพื่อให้มันขยับไปตำแหน่งที่ต้องการตั้งแต่ 0 ถึง 180 องศาได้แบบเนียนๆ
- Input Logic: ตัว Board Arduino จะรับค่าจาก Potentiometer 2 ตัว หรือ Joystick แบบ 2 แกน แล้วเอามา Map ค่าเพื่อสั่งงานตำแหน่ง Servo อีกที
Mechanical Design (การออกแบบเชิงกล)
- Leverage and Torque: เรื่องฟิสิกส์ต้องแม่นนะน้อง "ความยาวแขน" กับ "แรงบิด Servo (Torque)" มันแปรผันกัน ในส่วนของ Firmware พี่เลยใส่ระบบ "Speed Limiting" ไว้ด้วย เพื่อกันไม่ให้แขนมันสั่นพั่บๆ หรือล้มคว่ำเวลาขยับเร็วเกินไป ช่วยให้ตอนมันเคลื่อนไหวดูนิ่งและเสถียรขึ้นเยอะ!