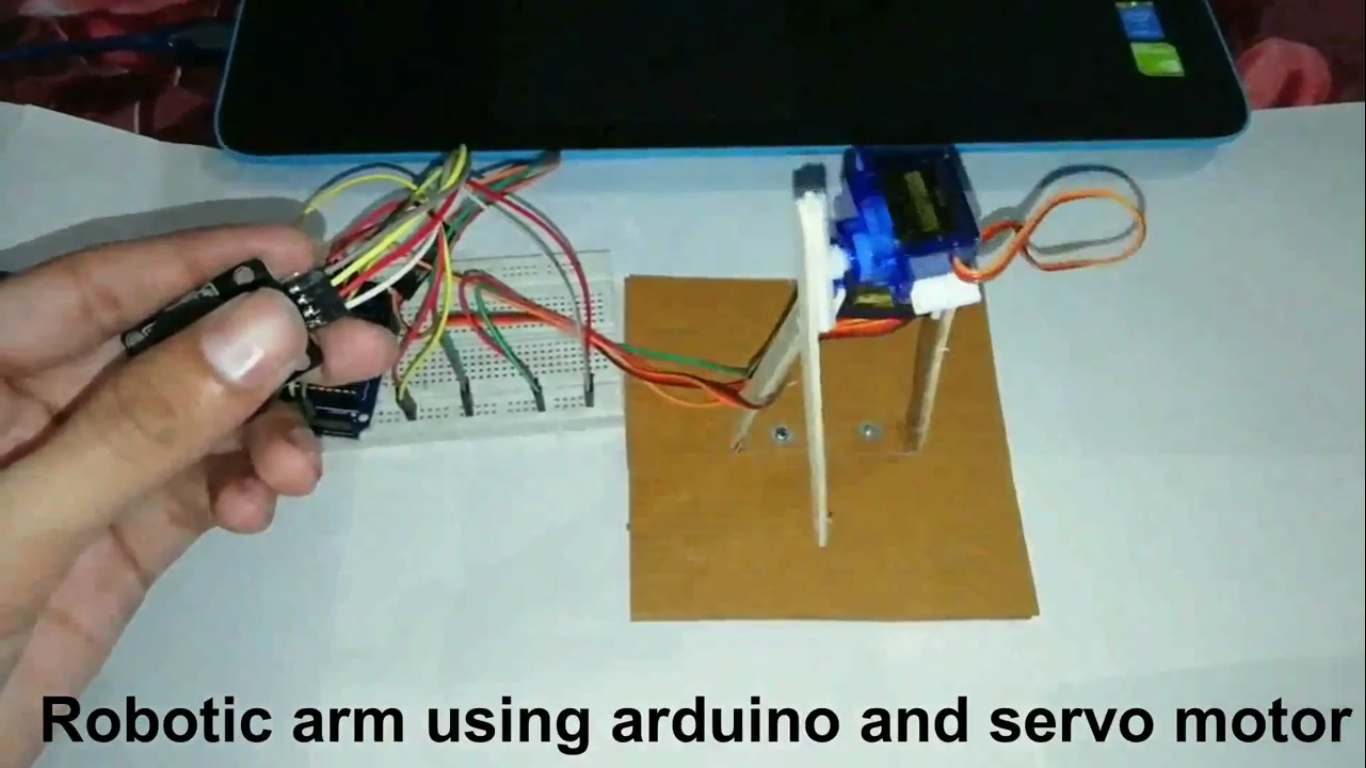
title: ชุดแขนกลจิ๋ว (Pick and Place Robotic Arm) ควบคุมด้วยจอยสติ๊ก
ในโลกของวิศวกรรมสมัยใหม่ ระบบอัตโนมัติ (Automation) และเทคโนโลยีหุ่นยนต์ (Robotics) ได้เข้ามาปฏิวัติอุตสาหกรรมการผลิตอย่างสิ้นเชิง โดยเฉพาะหุ่นยนต์ประเภท "Pick and Place" ซึ่งเป็นกลไกสำคัญในการหยิบจับและวางวัตถุด้วยความแม่นยำสูง โปรเจคนี้เราจะมาเจาะลึกการสร้างแขนกลจำลองขนาดเล็กที่ควบคุมแบบ Real-time ผ่านจอยสติ๊ก โดยใช้บอร์ดไมโครคอนโทรลเลอร์ Arduino เป็นสมองกลสั่งการ เพื่อเรียนรู้พื้นฐานของระบบควบคุม (Control Systems) และกลศาสตร์เบื้องต้น
เจาะลึกแนวคิดและหลักการทางวิศวกรรม
แขนกลรุ่นนี้ถูกออกแบบมาในลักษณะ 2 แกนอิสระ (2-DOF หรือ Degrees of Freedom) ซึ่งประกอบด้วยข้อต่อ (Joints) สองส่วนที่ทำงานประสานกัน:
- Base Joint (แกนฐาน): ควบคุมการหมุนในแนวราบ (Yaw) เพื่อกำหนดทิศทางซ้าย-ขวา
- Arm Joint (แกนแขน): ควบคุมการเคลื่อนที่ในแนวระนาบดิ่ง (Pitch) เพื่อยืดหรือหดแขนในการหยิบวัตถุ
ระบบการทำงานแบ่งออกเป็น 2 ส่วนหลัก:
- ชุดควบคุม (Input Interface): ใช้ Joystick Module ซึ่งภายในประกอบด้วยตัวต้านทานปรับค่าได้ (Potentiometer) สองตัว วางตัวในแกน X และ Y เมื่อเราขยับก้านควบคุม แรงดันไฟฟ้าจะเปลี่ยนแปลงตามตำแหน่ง (Voltage Divider Circuit) ซึ่ง Arduino จะทำการอ่านค่าผ่านโมดูล Analog-to-Digital Converter (ADC) ขนาด 10 บิต เปลี่ยนค่าแรงดันเป็นตัวเลข 0-1023
- ชุดขับเคลื่อน (Actuators): ใช้ Servo Motor (SG90) ซึ่งเป็นมอเตอร์กระแสตรงที่มีชุดเกียร์และระบบป้อนกลับ (Feedback Control) ภายในตัว ทำให้สามารถควบคุมตำแหน่งองศาได้อย่างแม่นยำผ่านสัญญาณ PWM (Pulse Width Modulation)
รายละเอียดวัสดุและอุปกรณ์ (Bill of Materials)
การเลือกใช้อุปกรณ์ในโปรเจคนี้เน้นความคุ้มค่าและประสิทธิภาพที่เหมาะสมกับขนาดโครงสร้าง:
- Arduino Uno R3: บอร์ดประมวลผลหลัก ทำหน้าที่รับค่าจากจอยสติ๊กมาคำนวณและส่งสัญญาณ PWM ไปยังเซอร์โวมอเตอร์
- Servo Motor (SG90) x 2: มอเตอร์ขนาดเล็กที่มีแรงบิด (Torque) ประมาณ 1.8 kg-cm ซึ่งเพียงพอสำหรับโครงสร้างไม้ไอศกรีม
- Joystick Module x 1: อุปกรณ์ป้อนคำสั่งแบบ 2 แกน พร้อมปุ่มกด (แต่ในโปรเจคนี้เน้นการใช้แกน X และ Y)
- โครงสร้าง (Mechanical Structure): ไม้ไอศกรีมและกระดาษแข็ง ซึ่งมีน้ำหนักเบา ช่วยลดภาระ (Load) ของมอเตอร์
- สาย Jumper (Male-to-Female และ Male-to-Male): สำหรับเชื่อมต่อสัญญาณและไฟเลี้ยง
ขั้นตอนการประกอบโครงสร้างเชิงกล (Mechanical Assembly)
ความท้าทายของการสร้างแขนกลคือการจัดการกับ "แรงบิด" (Torque) และ "จุดศูนย์ถ่วง" (Center of Gravity) เพื่อให้แขนกลเคลื่อนที่ได้อย่างราบรื่น
- การเตรียมฐาน (Base Foundation): ใช้กระดาษแข็งที่มีความหนาหรือไม้แผ่นเรียบเป็นฐาน ยิ่งฐานกว้างและหนักจะยิ่งช่วยลดการสั่นสะเทือนขณะที่แขนกลเคลื่อนที่ด้วยความเร็ว
- ติดตั้ง Base Servo (แกนที่ 1): ยึดเซอร์โวตัวแรกเข้ากับฐานด้วยกาวร้อนหรือสกรู โดยวางตำแหน่งให้ตั้งฉากกับพื้นโลก เพื่อทำหน้าที่เป็นจุดหมุนหลัก

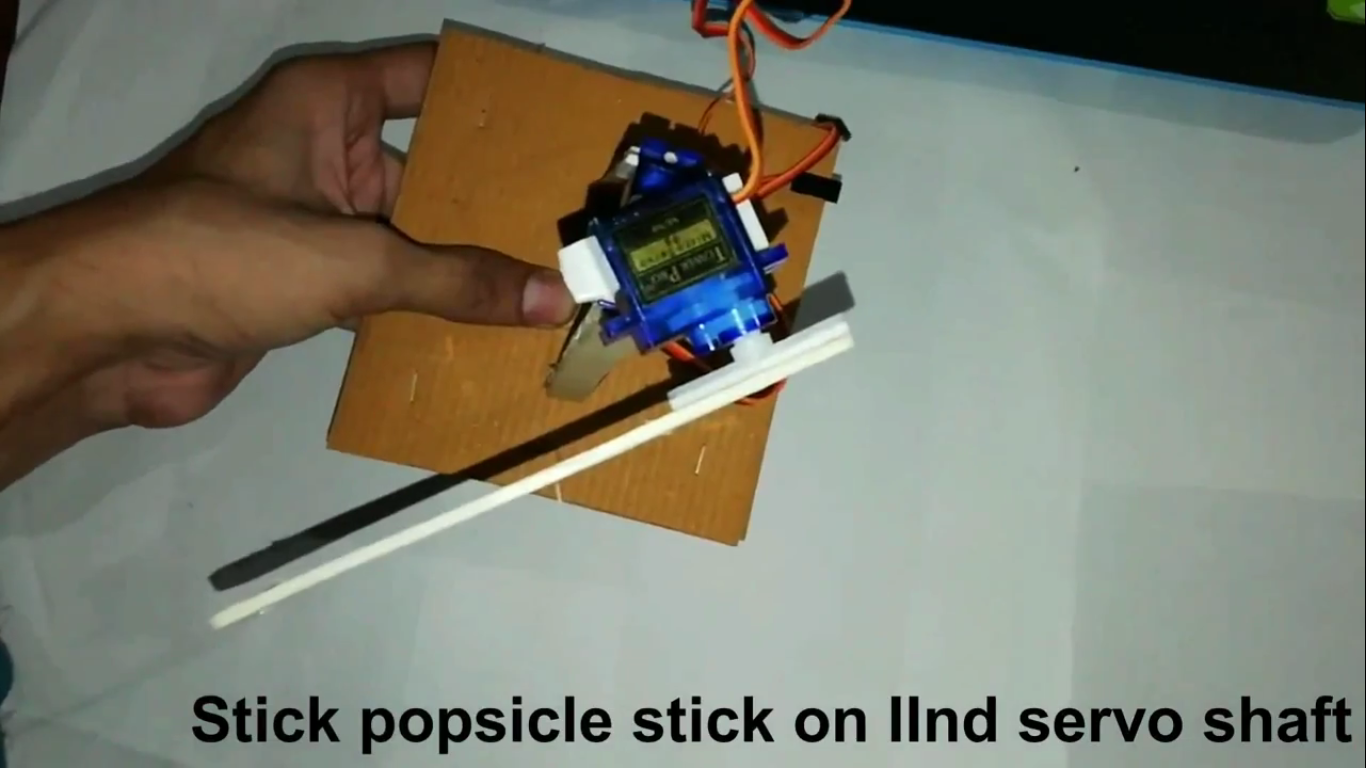
- การต่อช่วงแขน (The Linkage): ติดตั้งเซอร์โวตัวที่สองเข้ากับขาของเซอร์โวตัวแรก ในขั้นตอนนี้ต้องระวังเรื่องระยะห่าง (Clearance) เพื่อไม่ให้โครงสร้างขัดกันเองเมื่อมีการหมุน

- การติดตั้งแขนยก (Lifting Arm): นำไม้ไอศกรีมมาประกอบเป็นคานยาว ความยาวของคานจะมีผลต่อแรงบิด (หากคานยาวเกินไป เซอร์โวอาจไม่มีแรงยกพอ) แนะนำให้ใช้ความยาวประมาณ 10-15 ซม.
- การตรวจสอบสมดุล (Final Check): ทดสอบการหมุนด้วยมือเบาๆ เพื่อดูว่ามีส่วนใดติดขัดหรือไม่ โครงสร้างที่เสร็จสมบูรณ์ควรมีความสมมาตรและมั่นคง
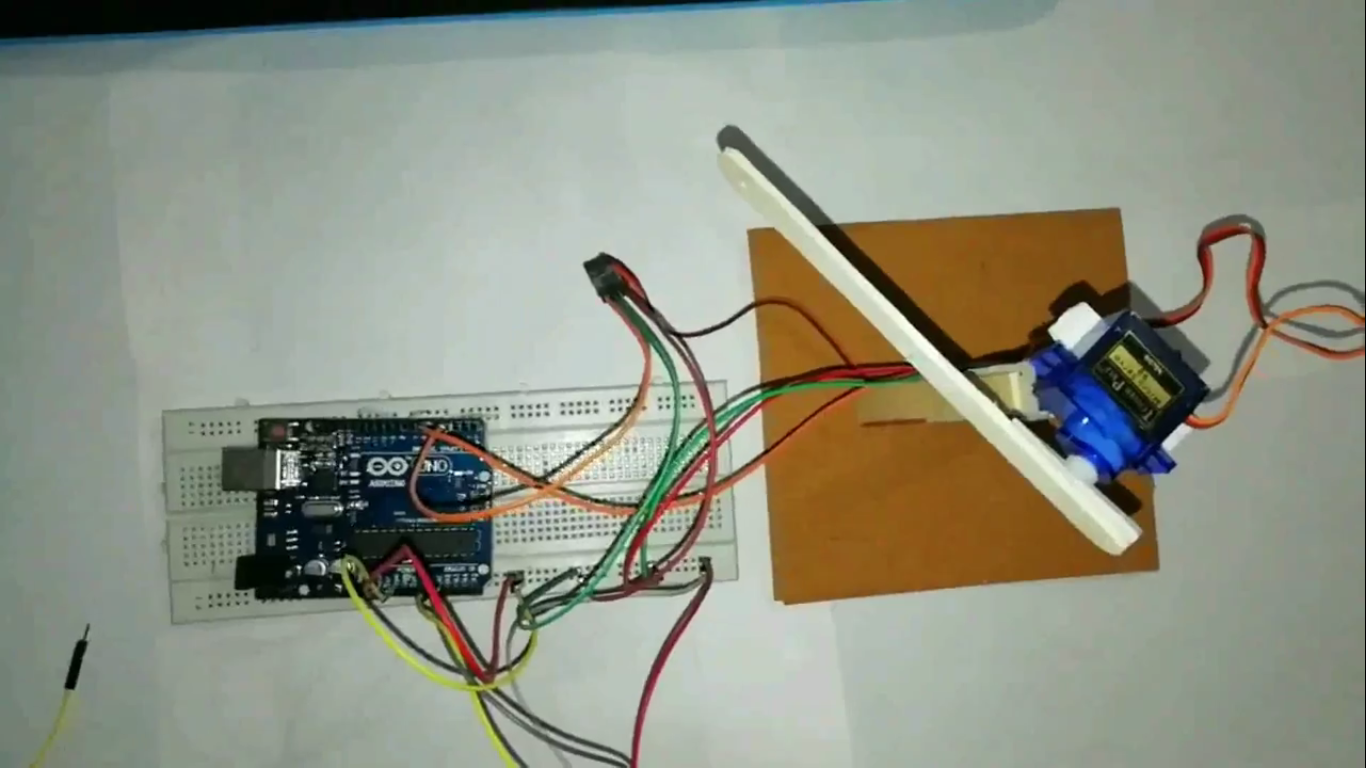
การเชื่อมต่อวงจรไฟฟ้า (Electrical Wiring)
การเชื่อมต่อวงจรต้องทำอย่างระมัดระวัง โดยเฉพาะสายไฟเลี้ยง (VCC) และสายดิน (GND) หากต่อสลับอาจทำให้เซนเซอร์หรือไมโครคอนโทรลเลอร์เสียหายได้:
1. การเชื่อมต่อ Servo Motors:
- Base Servo: สายสีส้ม (Signal) -> D3 | สายสีแดง (VCC) -> 5V | สายสีน้ำตาล (GND) -> GND
- Arm Servo: สายสีส้ม (Signal) -> D5 | สายสีแดง (VCC) -> 5V | สายสีน้ำตาล (GND) -> GND (หมายเหตุ: หากมอเตอร์สั่นบ่อย แนะนำให้ใช้แหล่งจ่ายไฟแยก 5V 2A เพื่อกระแสที่นิ่งขึ้น)
2. การเชื่อมต่อ Joystick Module:
- VRx (แกน X): เชื่อมต่อกับพิน A0 ของ Arduino
- VRy (แกน Y): เชื่อมต่อกับพิน A1 ของ Arduino
- +5V และ GND: เชื่อมต่อเข้ากับรางไฟของ Arduino
การวิเคราะห์ลอจิกโปรแกรม (Software Logic Analysis)
โปรแกรมถูกเขียนขึ้นโดยใช้ Library <Servo.h> เพื่อจัดการสัญญาณ PWM ที่ซับซ้อนให้กลายเป็นคำสั่งที่เข้าใจง่าย โดยมีลอจิกการทำงานดังนี้:
- Initialization: ประกาศตัวแปรสำหรับเก็บค่าจากจอยสติ๊ก และตั้งค่าพินที่ใช้งาน
- Signal Acquisition: ใช้ฟังก์ชัน
analogRead()อ่านค่าจากจอยสติ๊ก ซึ่งจะได้ตัวเลขในช่วง 0 ถึง 1023 - Data Mapping: เนื่องจาก Servo รับค่าองศาในช่วง 0 ถึง 180 เราจึงต้องใช้ฟังก์ชันทางคณิตศาสตร์
map(value, low1, high1, low2, high2)angleX = map(joyX, 0, 1023, 0, 180);angleY = map(joyY, 0, 1023, 0, 180);
- Actuation: ส่งค่าองศาที่แปลงแล้วไปยังเซอร์โวด้วยคำสั่ง
servo.write(angle)มอเตอร์จะหมุนตามทิศทางที่เราขยับจอยสติ๊กทันที
บทสรุปและการต่อยอด
โปรเจค "Pick and Place Robotic Arm" นี้เป็นจุดเริ่มต้นที่ยอดเยี่ยมสำหรับการเรียนรู้ Mechatronics (กลศาสตร์ + อิเล็กทรอนิกส์ + ซอฟต์แวร์) คุณได้เห็นภาพรวมของการเปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล และการประมวลผลข้อมูลจากโลกกายภาพสู่ระบบดิจิทัล
แนวทางการพัฒนาต่อยอด:
- เพิ่มแกนที่ 3: เพื่อให้แขนกลสามารถหยิบจับ (Gripper) วัตถุได้จริง
- ระบบบันทึกท่าทาง: เขียนโปรแกรมให้จำตำแหน่ง (Teaching Mode) เพื่อให้หุ่นยนต์ทำงานซ้ำๆ ได้เองอัตโนมัติ
- การควบคุมไร้สาย: เปลี่ยนจากจอยสติ๊กแบบสายเป็น Bluetooth หรือ WiFi เพื่อการสั่งงานระยะไกล
หากคุณชื่นชอบการสร้างสรรค์นวัตกรรมและอยากเรียนรู้อิเล็กทรอนิกส์ให้ลึกซึ้งยิ่งขึ้น อย่าลืมติดตามเนื้อหาใหม่ๆ และกด Subscribe ที่ช่อง YouTube "Electronics is Fun" เพื่อก้าวเข้าสู่โลกของวิศวกรรมไปด้วยกัน!
ขอขอบคุณทุกการติดตาม และสนุกไปกับการสร้างหุ่นยนต์ครับ!