ชื่อโปรเจกต์: Rover for Cave Exploration (หุ่นยนต์ตะลุยถ้ำ)
วัตถุประสงค์
ที่เราสร้างเจ้านี่ขึ้นมาก็เพื่อเช็กดูว่าถ้ำมันปลอดภัยพอที่จะเดินเข้าไปมั้ย โดยที่เราไม่ต้องเอาชีวิตคนไปเสี่ยง อัตโนมัติแบบจัดเต็ม ราคาประหยัด ใช้ง่าย แถมพกพาไปไหนมาไหนได้สะดวกจัดๆ สมัยนี้เขายังใช้ [Sensor](https://s.shopee.co.th/7VBG2rX65j) แบบมือถือเดินถือเข้าไปกันอยู่เลย ซึ่งมันเสี่ยงนะน้อง! เจ้าเครื่องนี้เลยทำหน้าที่เป็นเหมือน "ห้องสมุด Sensor ติดล้อ" วิ่งลุยแทนเราไปเลย
ข้อดีและจุดเด่น
- ช่วยให้รู้ว่าตอนไหนต้องสูบแก๊สมีเทน (Methane) ออกจากถ้ำ
- แจ้งเตือนได้ว่าตอนไหนคนขุดเหมืองต้องใส่หน้ากากออกซิเจน (Oxygen mask)
- ขนาดกระทัดรัดกำลังดี ใช้ง่ายสุดๆ
- ไม่ใช้เชื้อเพลิงฟอสซิล เป็นมิตรต่อสิ่งแวดล้อมนะจ๊ะ
- ไม่ต้องมี Controller อะไรให้วุ่นวาย ใช้แค่ Android Phone เครื่องเดียวก็คุมได้แล้ว
- ลดภาระการใช้คนลง ไม่ต้องเอาคนไปเสี่ยงในที่อันตราย
- เช็กปริมาณมีเทนได้แม่นยำ จะสูบออกตอนไหนก็สั่งมา
รายการของที่ต้องเตรียม
- [Arduino](https://s.shopee.co.th/7fUgFAWSki) UNO R3 ( Microprocessor - หัวใจหลักของงานนี้ )
- Mini Bread Board ( Circuit - ไว้เสียบสายไฟลองวงจร )
- Li - ION Battery ( Power supply 3.7V - แหล่งพลังงาน )
- 4WD Chassis ( Structure - โครงรถสุดเท่ )
- MQ5 ( LPG, Natural gas, Methane - Sensor ตรวจแก๊ส )
- MQ135 ( Smoke, Dust, Alcohol - Sensor ตรวจควันและฝุ่น )
- DHT22 ( Temperature and Humidity - วัดอุณหภูมิและความชื้น )
- HC-SR04 ( Proximity - Sensor วัดระยะกันชน )
- HC-05 ( Bluetooth Module - ไว้คุยกับมือถือ )
- Jumper Wires ( Connection - สายไฟเชื่อมต่อ ห้ามทำช็อตนะน้อง )
- L298N ( Dual H-bridge/Motor Driver - ตัวขับมอเตอร์ให้รถวิ่ง )
DIAGRAM (ผังการต่อวงจร)
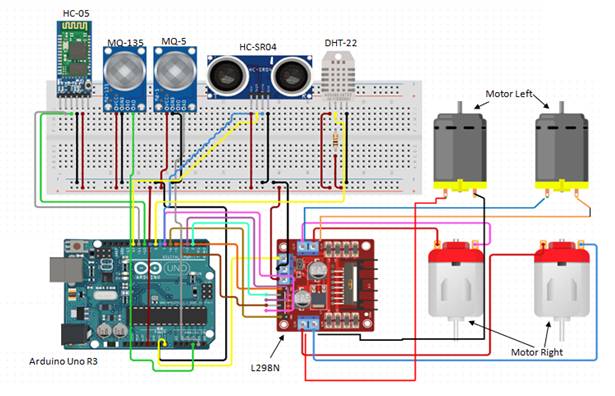
วิธีลุย (PROCEDURE)
- ขั้นแรก ประกอบ Chassis หรือโครงรถที่เตรียมไว้ให้เรียบร้อยก่อน
- จากนั้นใช้กาวติดพวกอุปกรณ์อิเล็กทรอนิกส์ลงไปบนโครงรถ จัดตำแหน่งให้หล่อๆ
- แล้วก็เริ่มเดินสายไฟเชื่อมต่ออุปกรณ์ต่างๆ ผ่าน Breadboard ตามแผนผังที่วางไว้
- สุดท้าย ต่อระบบทั้งหมดเข้ากับ Power supply ผ่านทาง Motor Driver เช็กขั้วให้ดีอย่าให้บึ้มนะวัยรุ่น!
รายละเอียดทางเทคนิคแบบจัดเต็ม (EXPANDED TECHNICAL DETAILS)
ระบบนำทางสุดถึกสำหรับใต้ดิน (Rugged Subterranean Navigation Hub)
เจ้าหุ่นยนต์ตัวนี้ถูกออกแบบมาเพื่อลุยในที่มืดและแคบในถ้ำที่คนเข้าไปลำบาก
- แผงไฟ LED พลังสูง (High-Power LED Illumination Array): Arduino จะคุมแผง LED ให้สว่างจ้า และมีระบบ Firmware "Auto-Focus" ที่จะเร่งความสว่างโดยอัตโนมัติเมื่อ Sensor วัดระยะ (Ultrasonic) ตรวจเจอทางข้างหน้าว่าเป็นพื้นที่โล่ง บอกเลยว่าหล่อเท่เลยงานนี้
- ระบบขับเคลื่อน L298N Differential Drive: คุมมอเตอร์เกียร์แรงบิดสูง 4 ตัว ใช้ตรรกะแบบ "Tank-Drive" (แบบรถถัง) ทำให้มันหมุนตัวอยู่กับที่ (Zero-turn radius) ได้เลย เหมาะมากกับทางแคบๆ ในถ้ำ
ประสิทธิภาพ (Performance)
- ระบบ Telemetry สำรอง: ปรับแต่งมาเพื่อการควบคุมระยะไกล ถ้าเกิดสัญญาณหลุดขึ้นมา Arduino จะเข้าโหมด "กลับบ้าน" (Return Home) โดยอัตโนมัติ มันจะวิ่งย้อนกลับตามเส้นทางเดิมที่บันทึกไว้ใน Log จนถึงปากถ้ำเอง สู้งานนะน้อง ไม่ต้องกลัวหาย!