เจลแอลกอฮอล์วางกันเกลื่อนเมือง ทั้งตามท้องถนนและที่สาธารณะ ตั้งแต่โควิด-19 มาแรง แต่พอนึกถึงว่าต้องไปกดเจลขวดเดียวกันกับคนเป็นร้อยเป็นพัน... อืม มันไม่ค่อยสวยเท่าไหร่ เลยเป็นที่มาของโปรเจคนี้
ภาพรวมโปรเจค
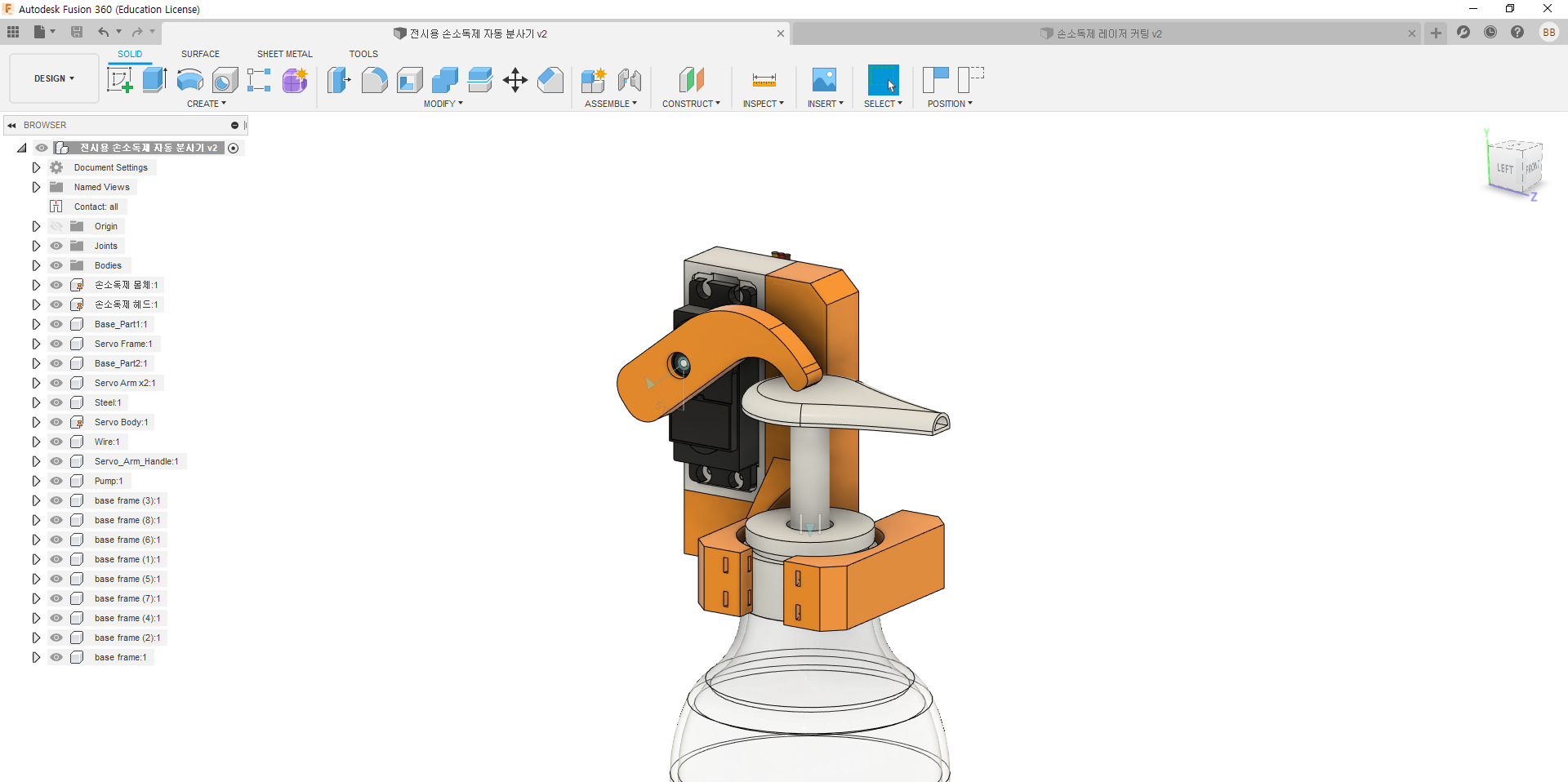
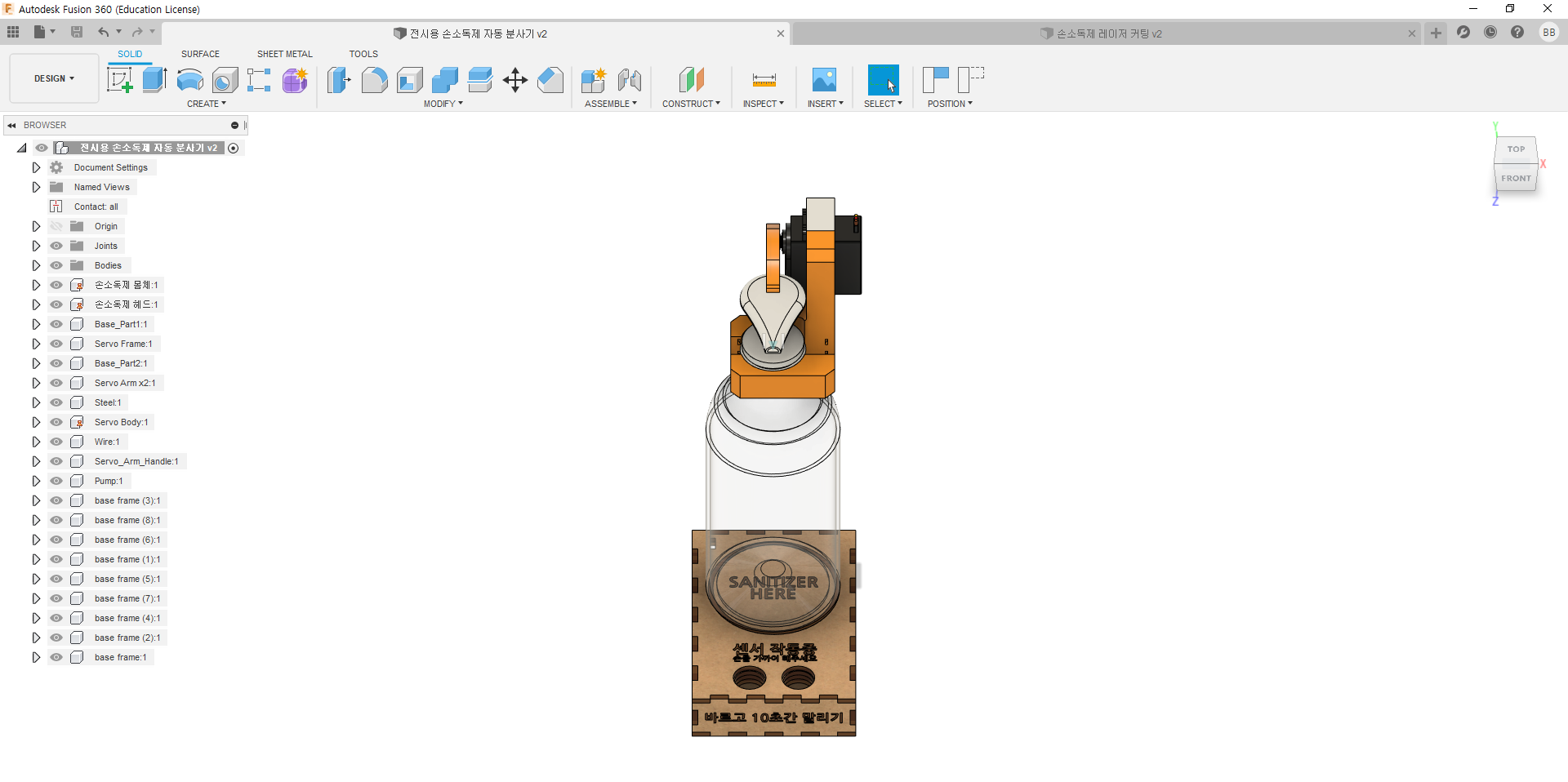
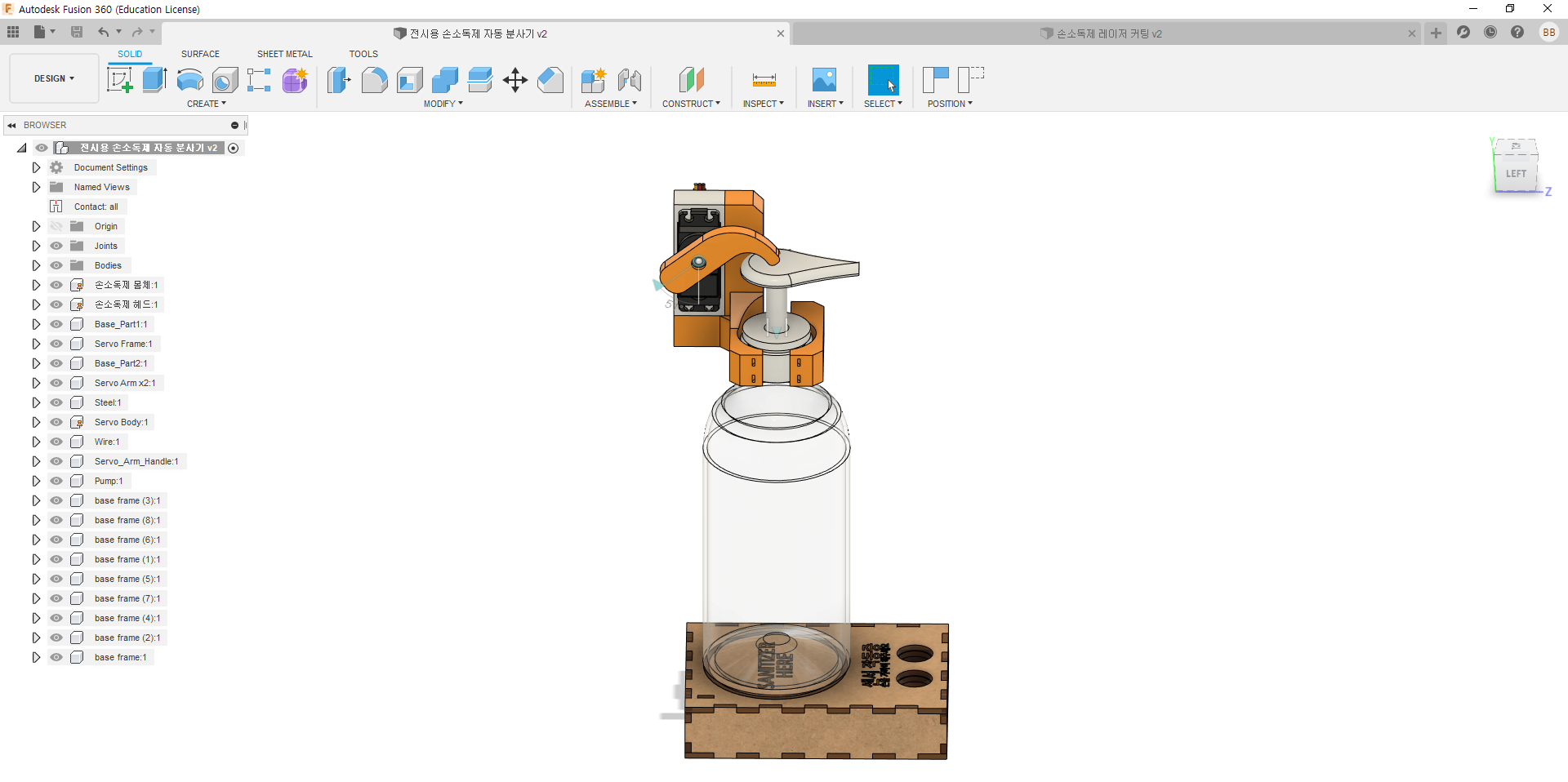
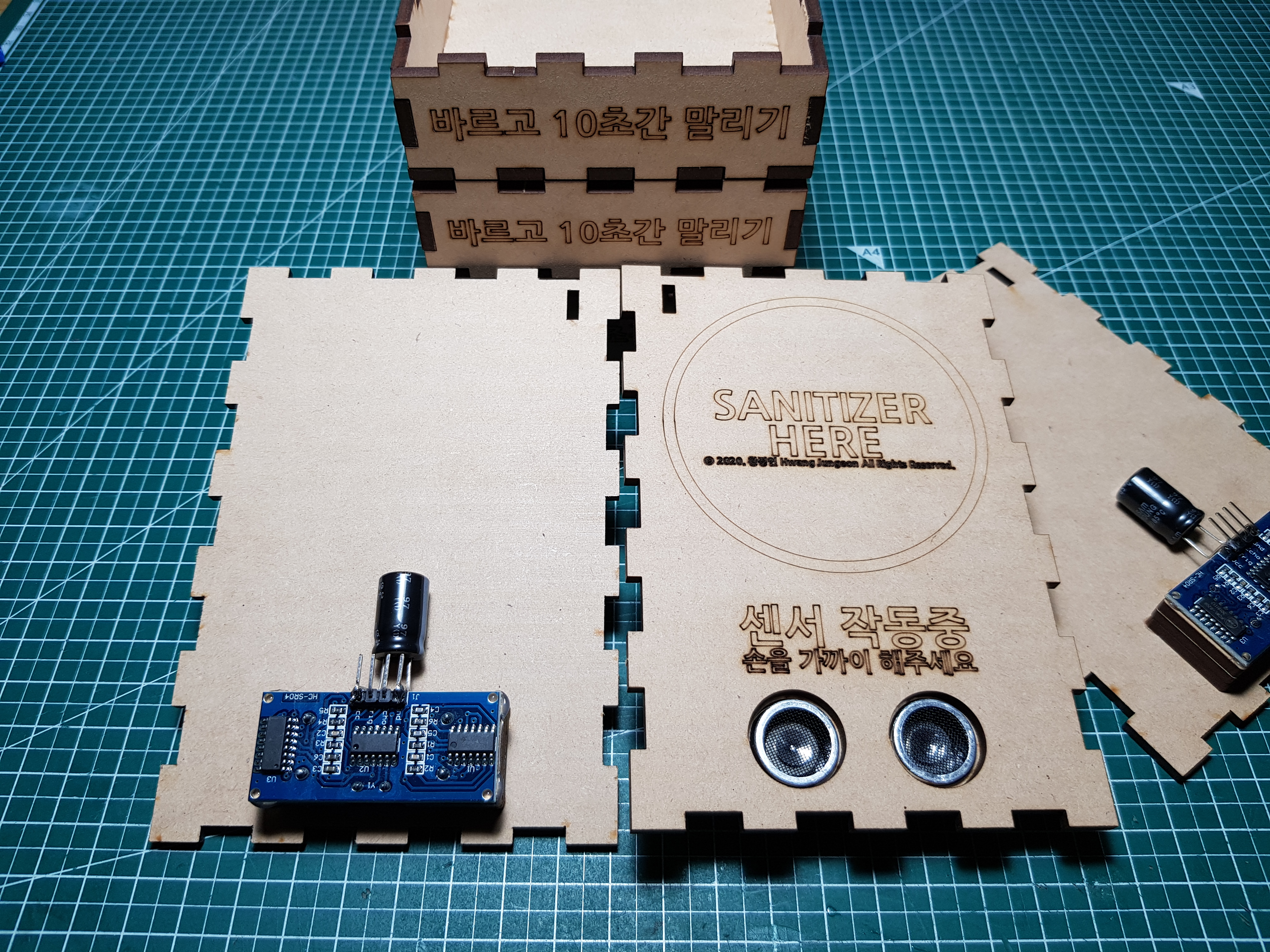
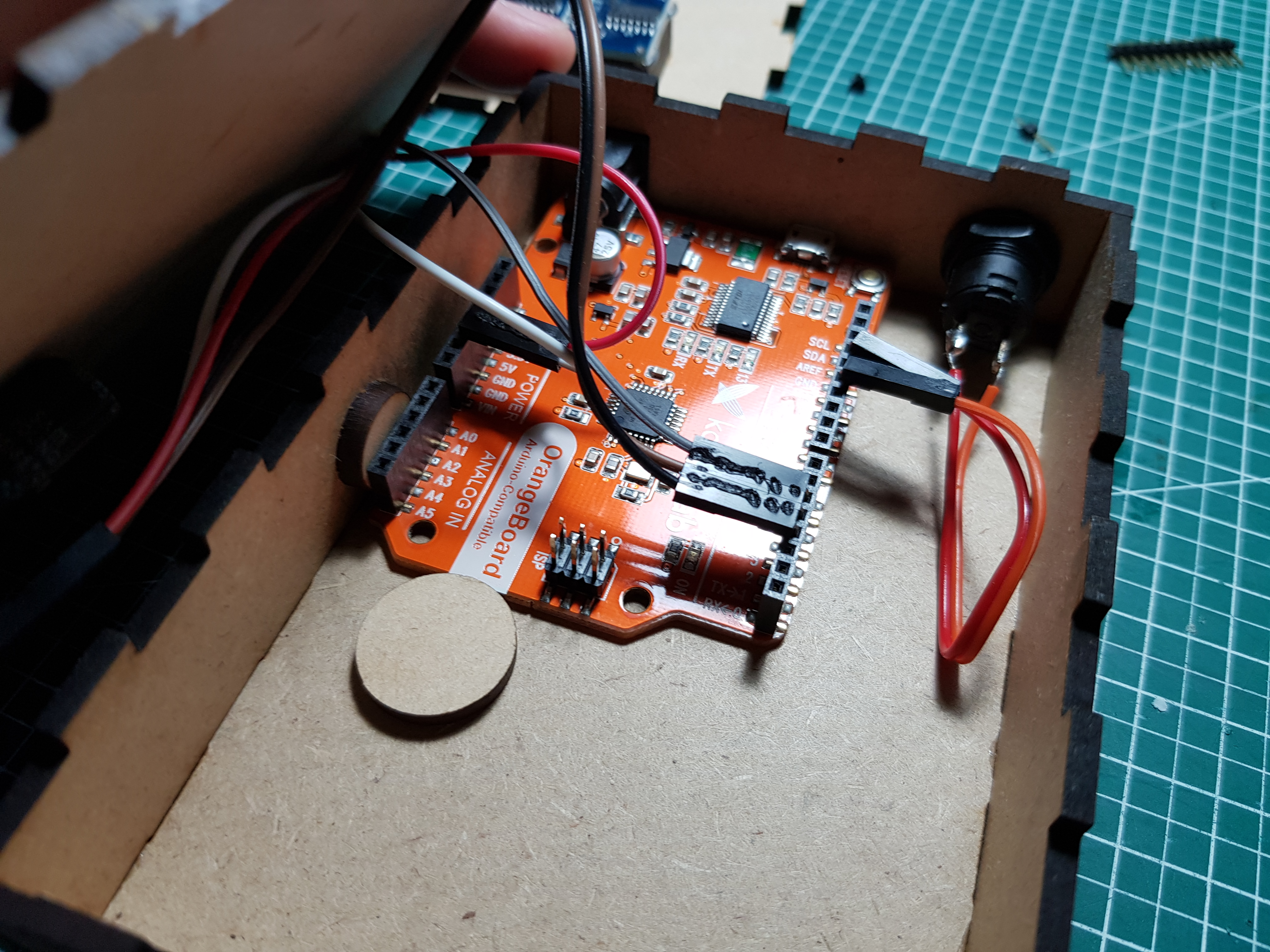
"Sanit-Bot Actuator" คือโปรเจคอัตโนมัติกลไกที่ออกแบบมาเพื่อดัดแปลงขวดกดเจลแบบธรรมดา ให้กลายเป็นระบบกดอัตโนมัติแบบไม่ต้องใช้มือ (Hands-free) โดยใช้ เซอร์โวแรงบิดสูง MG996R เป็นตัวให้แรงกดเจลที่แม้แต่ขวดแบบอุตสาหกรรมก็กดได้สบาย ส่วนการตรวจจับผู้ใช้ก็ใช้ เซ็นเซอร์วัดระยะอัลตราโซนิก HC-SR04 โปรเจคนี้เป็นตัวอย่างที่ดีในการศึกษาเรื่อง การแยกแหล่งจ่ายไฟกระแสสูง (High-current power decoupling), กลศาสตร์คาน (Lever-arm mechanics) และ การออกแบบโครงหุ่นยนต์ (Robotic enclosure design) โดยผสมผสานระหว่างโครงสร้างที่ตัดด้วยเลเซอร์กับขายึดที่พิมพ์จากเครื่อง 3D พริ้นเตอร์
ลึกลงไปในรายละเอียดทางเทคนิค
- การขับเคลื่อนด้วยแรงบิดสูง (MG996R):
- แรงบิด vs แรงกด: ปั๊มเจลแอลกอฮอล์ทั่วไปต้องการแรงกด ($F$) ที่มากพอเพื่อเอาชนะแรงสปริงภายใน เซอร์โว MG996R ให้แรงบิดสูงถึง 11.0 kg-cm ซึ่งเกือบจะ 10 เท่าของเซอร์โว SG90 ทั่วไป ทำให้มันกดแม้แต่ขวดเจลขนาดใหญ่แบบถังก็ยังไหว
- หลักการของคาน: แขนกดที่พิมพ์จาก 3D พริ้นเตอร์ทำหน้าที่เป็นเครื่องกลอย่างง่าย โดยการปรับความยาวของแขน ช่วยจัดการการแลกเปลี่ยนระหว่าง "ระยะกด" กับ "ความเร็วในการกด" ได้
- การแยกแหล่งจ่ายไฟ (ตัวเก็บประจุ 1000µF):
- กระแสไฟกระชาก (Inductive Inrush Current): เซอร์โวแรงบิดสูงสามารถกินกระแสเกิน 1.5 แอมป์ได้ตอนเริ่มทำงานหรือตอนติดขัด การใช้ไฟกะทันหันแบบนี้ทำให้แรงดัน 5V ของ Arduino "ตก" จนอาจทำให้ไมโครคอนโทรลเลอร์รีเซ็ตหรือทำงานผิดพลาดได้
- แหล่งสำรองพลังงาน: โปรเจคนี้ใช้ ตัวเก็บประจุอิเล็กโทรไลต์ 1000µF ต่อขนานระหว่างขา VCC และ GND มันทำหน้าที่เหมือนแหล่งพลังงานสำรองความเร็วสูง คอยจ่ายกระแสไฟ "พุ่ง" ที่จำเป็นให้กับมอเตอร์ และช่วยปรับแรงดันให้เรียบ เพื่อให้วงจรลอจิกทำงานได้อย่างเสถียร
- การกรองสัญญาณรบกวนจากอัลตราโซนิก:
- สัญญาณรบกวนจากสิ่งแวดล้อมอาจทำให้เซ็นเซอร์อัลตราโซนิกรายงานค่าเป็น "0" หรือระยะทางที่ผิดเพี้ยนได้ เฟิร์มแวร์จึงใช้วิธี ค่าเฉลี่ยแบบเคลื่อนที่ (Rolling Average) หรือการตรวจสอบด้วยเกณฑ์ง่ายๆ (เช่น จะกดก็ต่อเมื่อระยะทางน้อยกว่า 15 ซม. ติดต่อกัน 3 รอบ) เพื่อให้แน่ใจว่าปั๊มจะทำงานเฉพาะเมื่อมีมือวางไว้ใต้เครื่องจ่ายเจลจริงๆ
- การป้องกันความร้อนและแรงเครียดทางกล:
- โค้ดมีลอจิก "การปลด (Detaching)" เฉพาะ หลังจากกดปั๊มแล้ว เซอร์โวจะกลับไปที่ตำแหน่งกลาง และสามารถใช้คำสั่ง
servo.detach()เพื่อหยุดสัญญาณ PWM ได้ ซึ่งจะป้องกันไม่ให้มอเตอร์ "ส่งเสียงฮัม" หรือร้อนเกินไประหว่างรอผู้ใช้คนต่อไป
- โค้ดมีลอจิก "การปลด (Detaching)" เฉพาะ หลังจากกดปั๊มแล้ว เซอร์โวจะกลับไปที่ตำแหน่งกลาง และสามารถใช้คำสั่ง
วิศวกรรมและการสร้างต้นแบบ
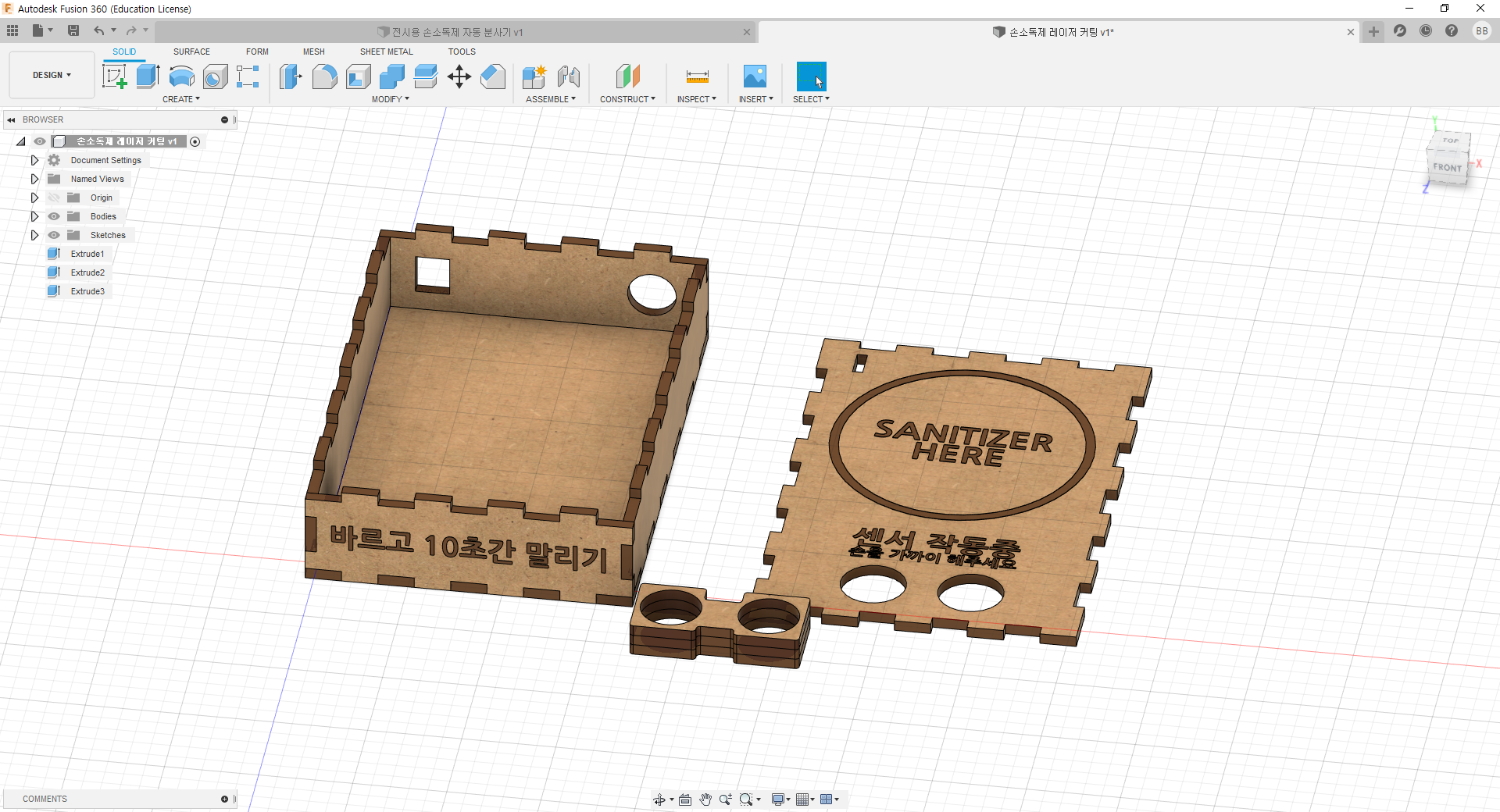
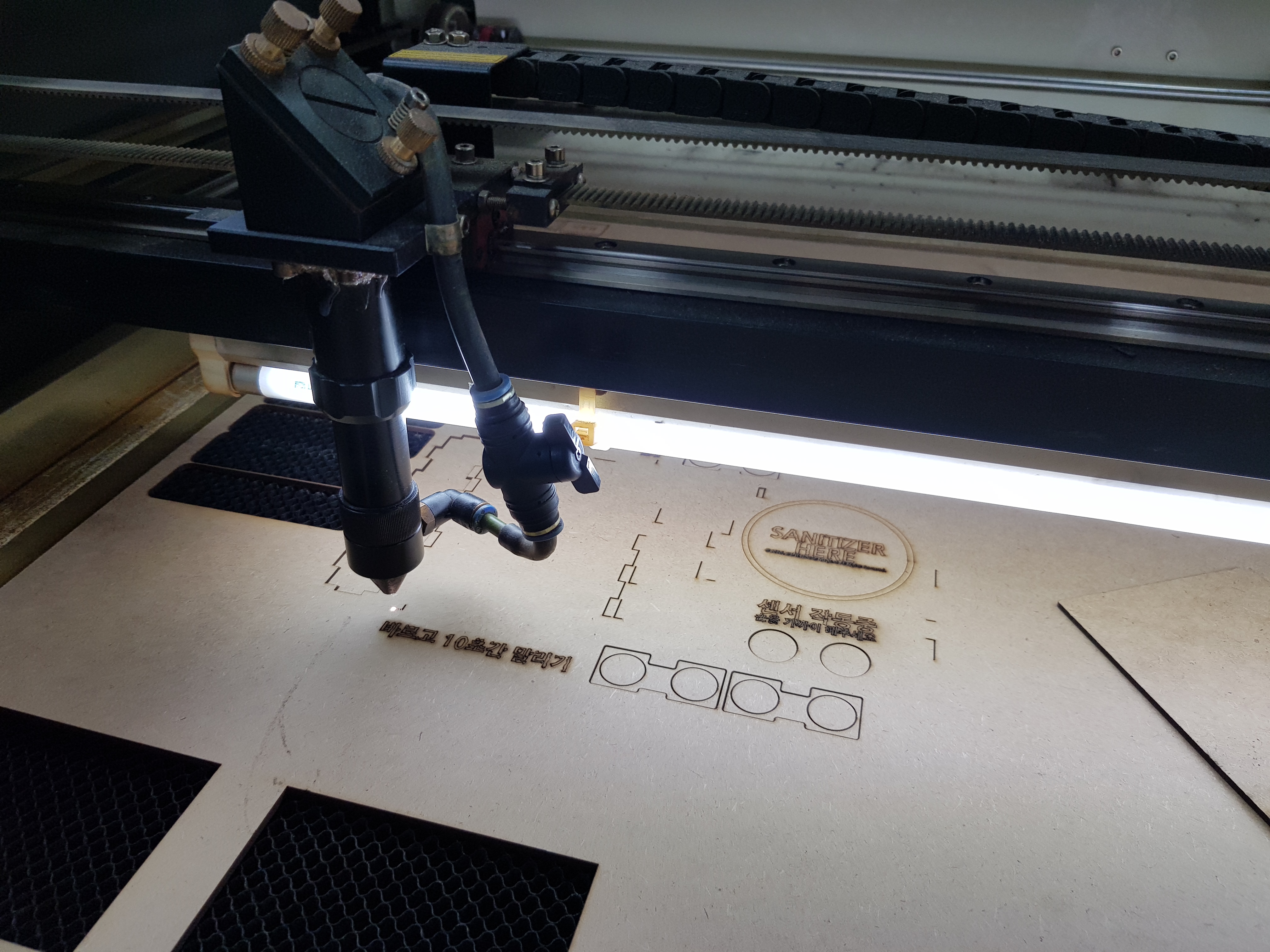
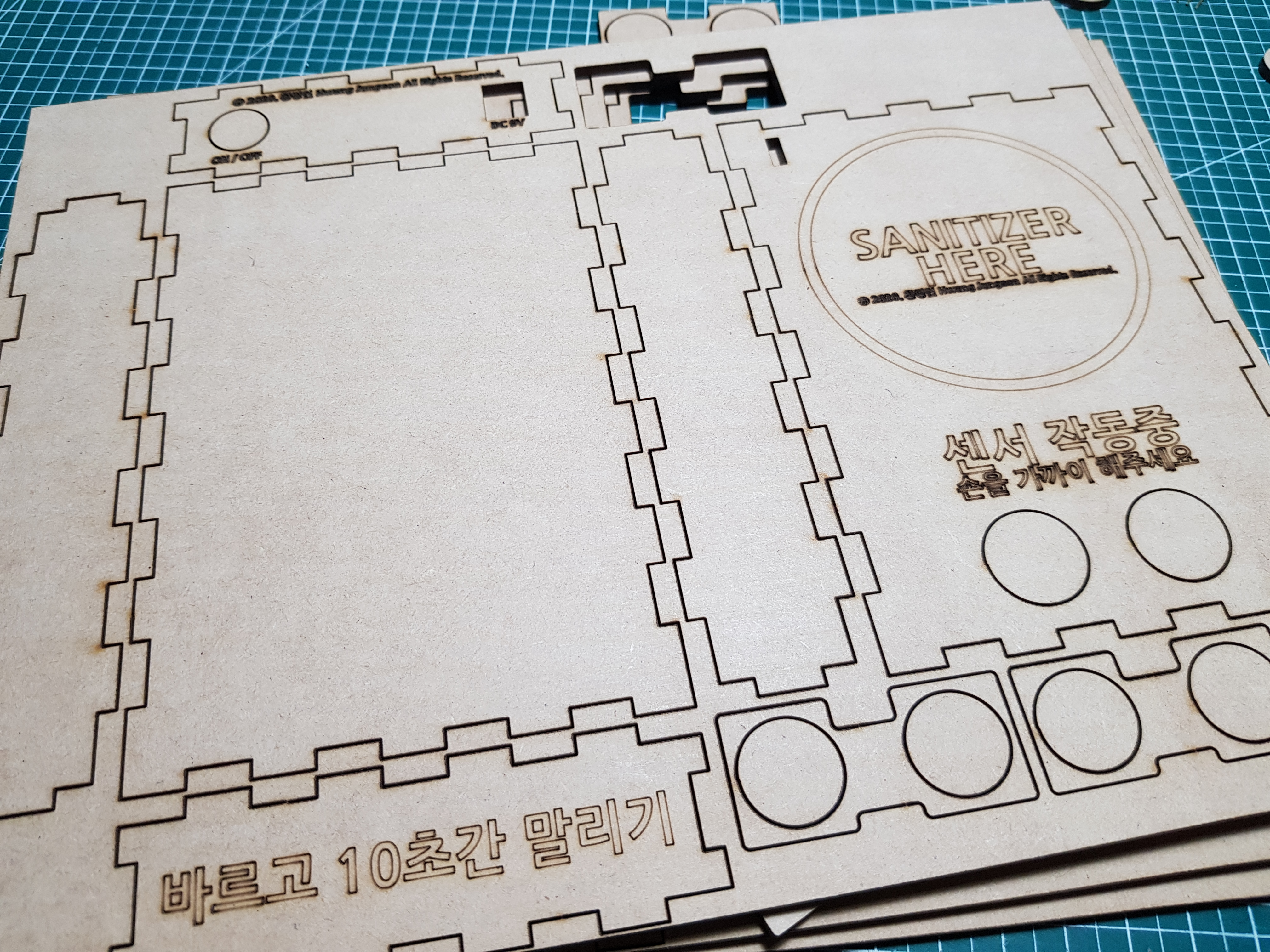
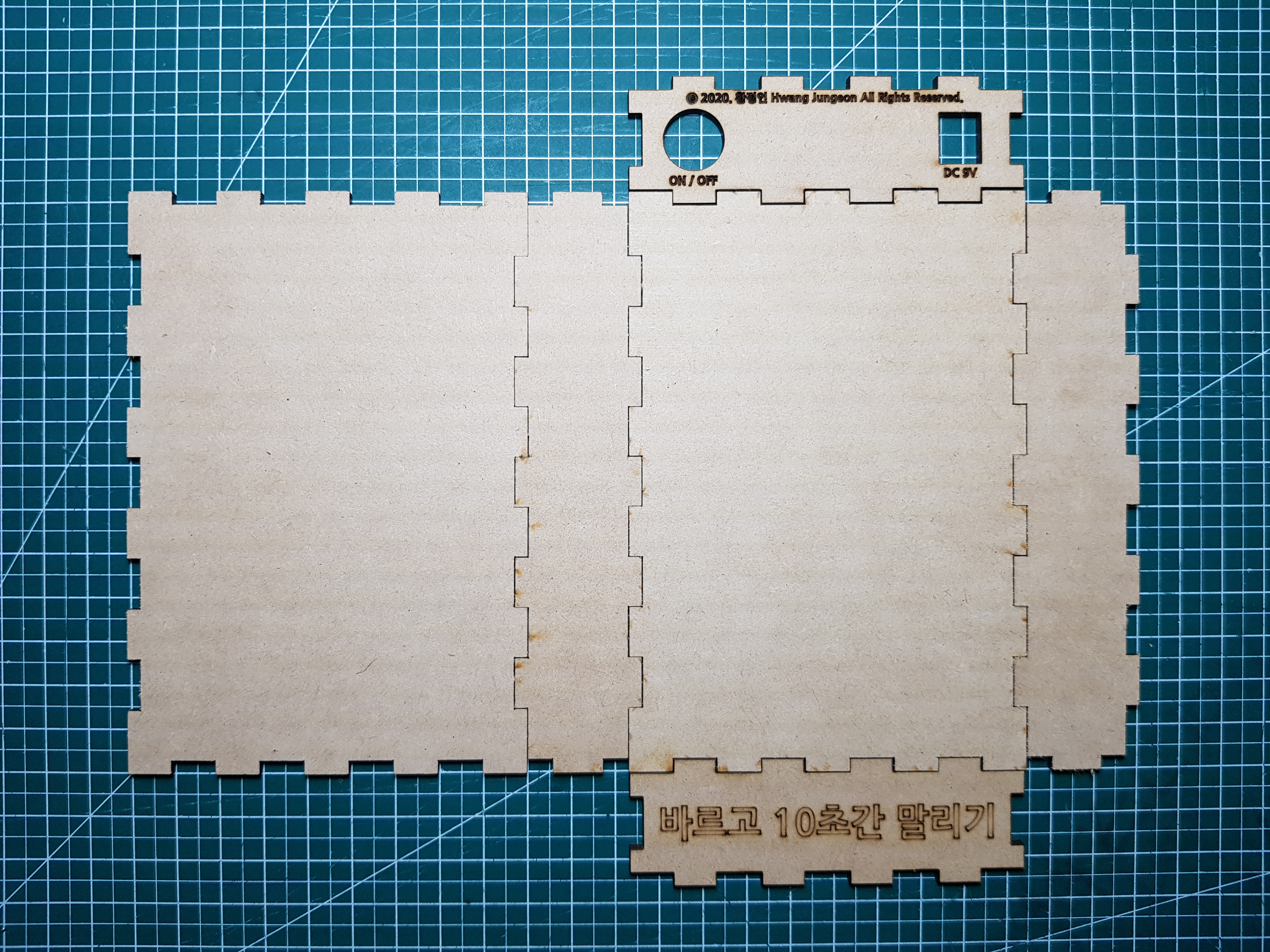
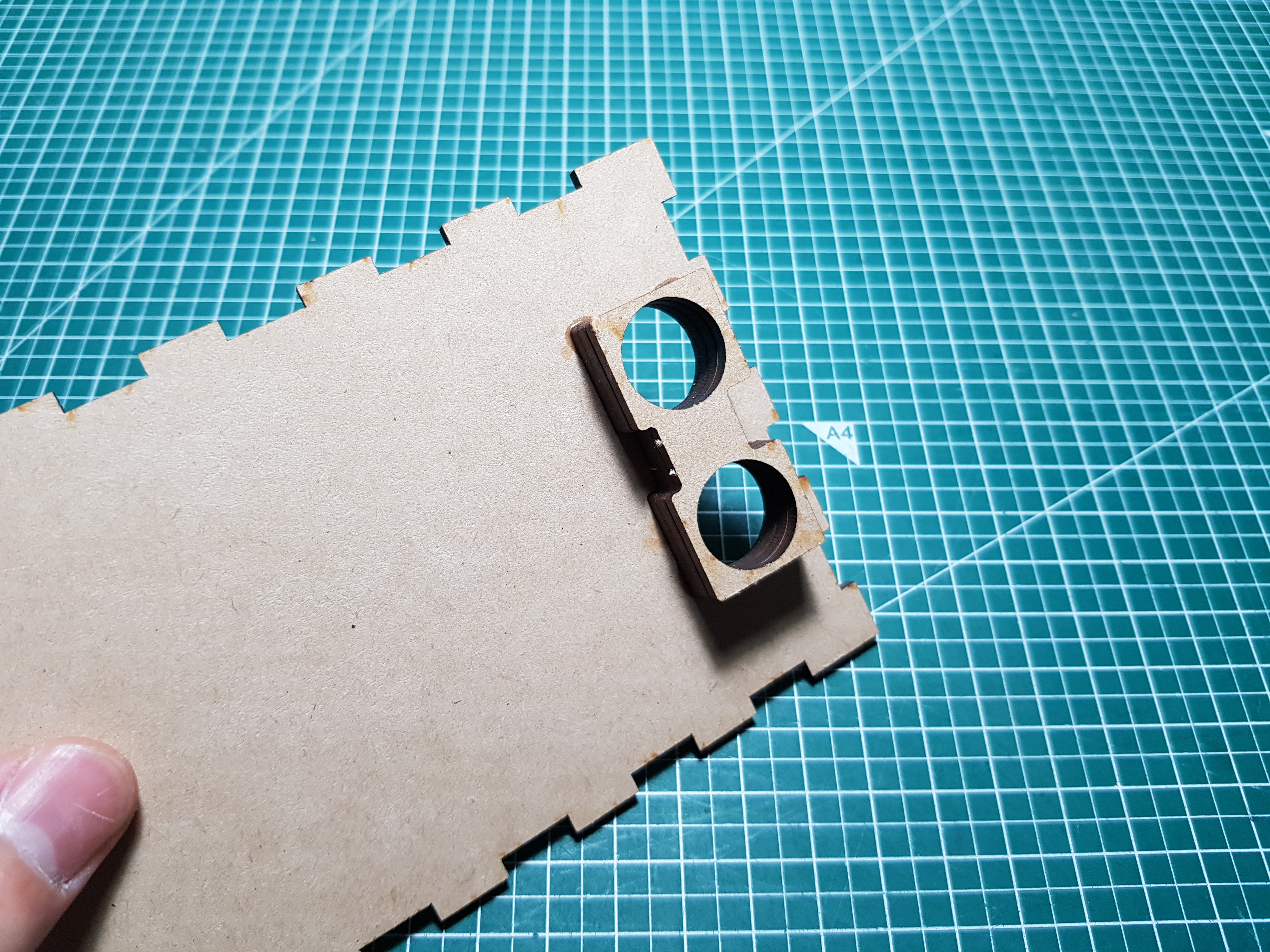
- การผลิตแบบผสมผสาน (Hybrid Manufacturing): โปรเจคนี้ใช้ เลเซอร์ตัด (Laser Cutting) สำหรับโครงสร้างหลัก (แอคริลิคหรือไม้อัด) เพื่อรับน้ำหนักได้ดี ส่วนชิ้นส่วนที่มีรูปทรงซับซ้อน เช่น ขาตั้งเซนเซอร์และอะแดปเตอร์ปั๊ม เราใช้ การพิมพ์ 3 มิติ (3D Printing) เอา งานแบบนี้ต้องเลือกเครื่องมือให้ถูก อย่าไปใช้คัตเตอร์ตัดอะคริลิคหนาๆ เดี๋ยวหักนะตัว!
- ปรับระยะชักได้ตามใจ (Calibrated Stroke Length): ขวดเจลแต่ละยี่ห้อมัน "ระยะกด" ไม่เท่ากันนี่นา โค้ด Arduino ของเราจึงออกแบบให้มีตัวแปรค่าคงที่ที่ปรับได้ (adjustable constant variables) ให้น้องสามารถปรับมุมต่ำสุดและสูงสุดของเซอร์โว (servo) ให้เข้ากับความสูงขวดและแรงสปริงเฉพาะเจาะจงได้เลย งานละเอียดแบบนี้แหละที่ทำให้เครื่องเราพิเศษ
- ไฟบอกสถานะ (Status Indicators): เราได้วางวงจรไฟ LED ที่เชื่อมกับเซนเซอร์อัลตราโซนิก (Ultrasonic) ไว้ให้เห็นชัดเจนเลยว่าทำงานอยู่ และถ้าอยากอัพเกรดในอนาคต ก็สามารถเพิ่มระบบเตือน "ขวดใกล้หมด" ได้ โดยนับจำนวนรอบการกดที่บันทึกไว้ในหน่วยความจำ EEPROM ของ Arduino ไว้เลย
- ความปลอดภัยและการปฏิบัติตามมาตรฐาน (Safety & Compliance): ด้วยการกำจัด "จุดสัมผัสร่วม" ที่คนเป็นร้อยเป็นพันต้องมาจับในที่สาธารณะ อุปกรณ์ชิ้นนี้จึงเป็นเหมือนเกราะป้องกันการปนเปื้อนข้ามกันในระดับฮาร์ดแวร์ที่ได้ผลจริง เหมาะมากสำหรับการติดตั้งในโรงเรียนหรือออฟฟิศ งานดีมีประโยชน์แบบนี้ ต้องจัดไปวัยรุ่น!

เพิ่มความสะอาดให้อัตโนมัติด้วยความแม่นยำแรงบิดสูง—นำพาปัญญาเชิงกลไกมาสู่การป้องกันโรคระบาด สู้งานนะน้อง!