ก็คือพี่อยากลองเขียน Java แล้วก็ต่อยอดไปทำ Image Processing บ้างอะนะ เลยเริ่มต้นด้วยการเขียนโค้ดบนมือถือ Android ตัวเอง แล้วมันก็เลยบึ้มไปใหญ่เลยอะ หลังจากนั่งงมเป็นล้านชั่วโมงไป ก็เจอแอปฟรีตัวนึงที่ช่วยให้เราสร้างแอปพลิเคชันง่ายๆ เร็วๆ กับ Arduino ได้แบบจัดเต็ม:
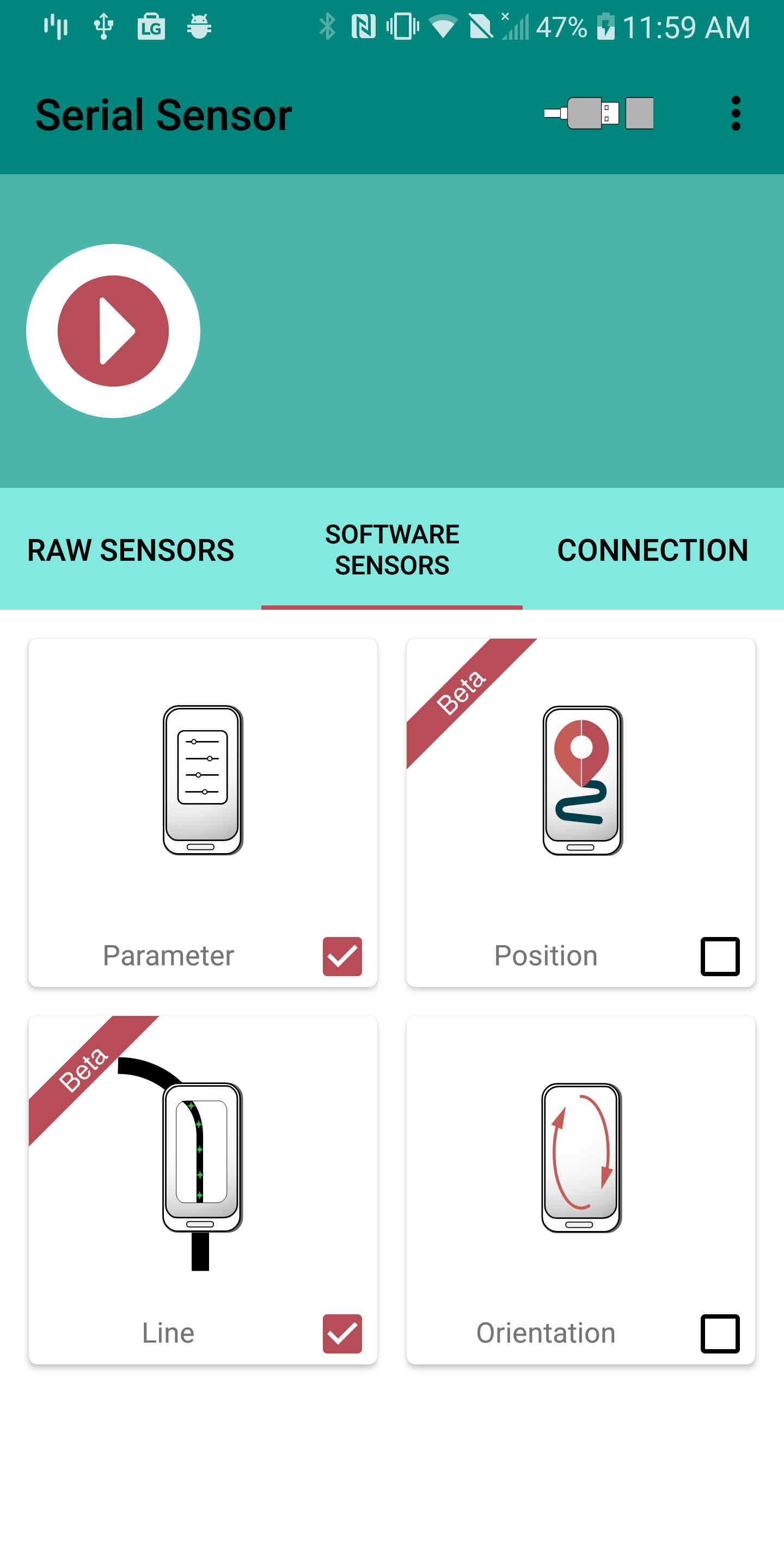
- สตรีมเซ็นเซอร์จากกล้องได้เลย ปัจจุบันมีเซ็นเซอร์ตรวจจับเส้นและตำแหน่ง
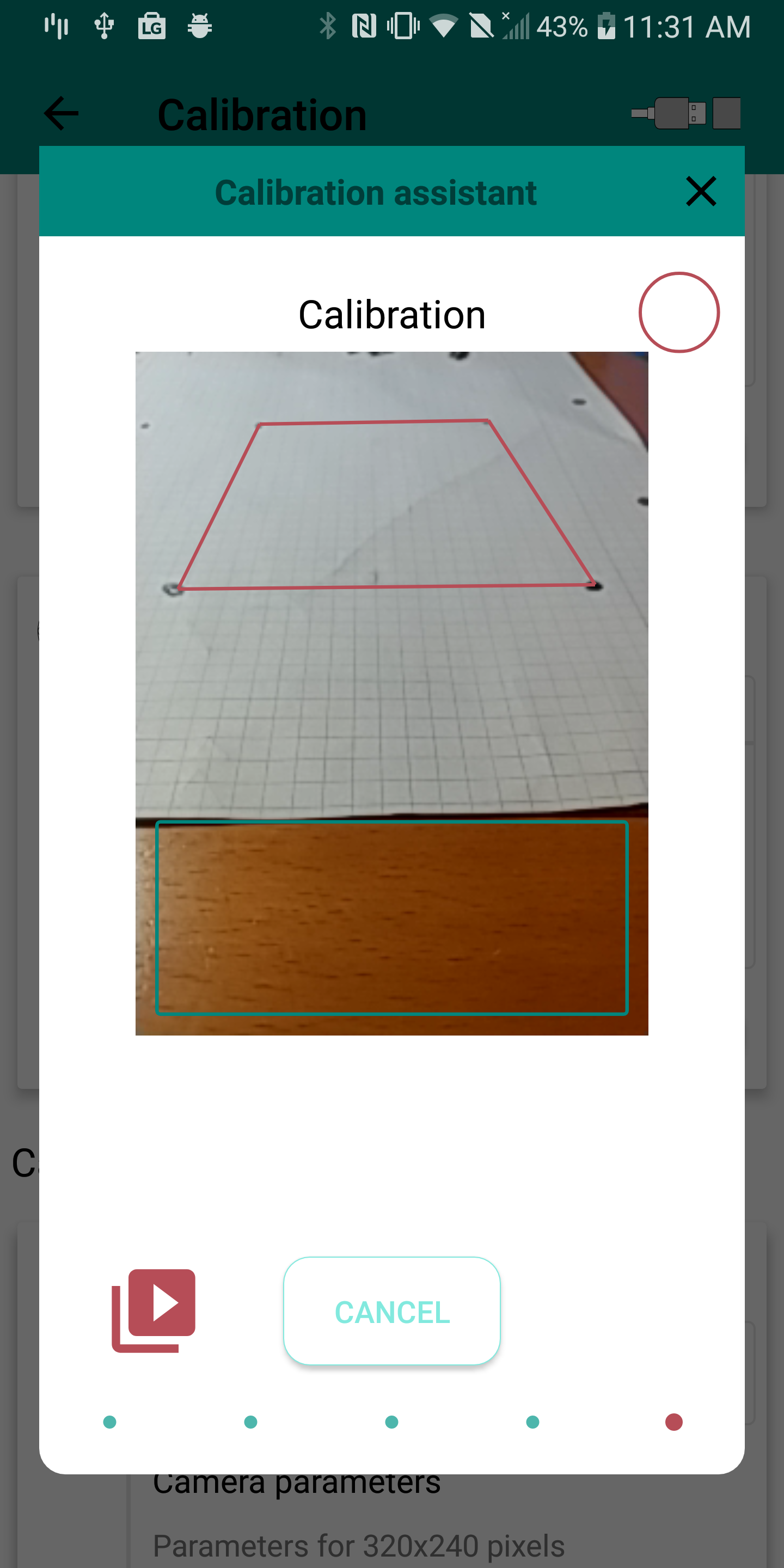
- มีระบบปรับเทียบกล้อง (Calibration) แบบเบสิคในตัว
- ส่งข้อมูลผ่าน USB, Bluetooth (โมดูล HC) หรือเซฟเป็นไฟล์ CSV ก็ได้
- สตรีมข้อมูลจากเซ็นเซอร์ภายในมือถือ (เช่น Accelerometer) ออกมาได้ด้วย
แล้วมันต่างจากของที่มีอยู่แล้วยังไง? มันใช้กล้องได้จริง และหน้าตาเหมือนแอปใช้งานจริงเลยอะ
หน้าตามันประมาณนี้:

ด้านเทคนิค: กล้องและการหาทาง
โปรเจกต์นี้เผยให้เห็นเลเยอร์ลับๆ ของการเชื่อมต่อสมาร์ทโฟนกับหุ่นยนต์แบบง่ายๆ:
- เลเยอร์ตรวจจับ: แอป Serial Sensor App บนมือถือจะใช้กล้องตรวจจับเส้นสีดำบนพื้นขาวแบบเรียลไทม์
- เลเยอร์ประมวลผล: แอปจะทำการคำนวณประสิทธิภาพสูงเพื่อหา "ตำแหน่งของเส้น" แล้วส่งค่าเป็นตัวเลขไปให้ Arduino
- เลเยอร์สื่อสาร: ข้อมูลจะถูกส่งจากมือถือไปหา Arduino เป็นจังหวะๆ ผ่าน สาย USB-OTG หรือ โมดูลบลูทูธ HC-05
- เลเยอร์ขับเคลื่อน: โมดูล L298N Motor Driver จะจ่ายกระแสสูงเพื่อขับมอเตอร์ DC ตามตำแหน่งของเส้นที่ตรวจจับได้
- ลูปควบคุมทิศทาง: โค้ดบน Arduino จะปรับความเร็วและทิศทางของมอเตอร์เพื่อให้กล้องอยู่กึ่งกลางเส้นตลอดเวลา
อุปกรณ์ฮาร์ดแวร์
- Arduino Uno: เป็น "สมอง" ของโปรเจกต์ คอยจัดการข้อมูลจาก Serial และควบคุมการเคลื่อนที่
- สมาร์ทโฟนที่มีกล้อง: ทำหน้าที่ประมวลผลภาพความละเอียดสูงและตรวจสอบเส้นทางให้หุ่นยนต์
- L298N Motor Driver: จัดการกับไฟ 12V ที่ใช้ขับมอเตอร์ได้อย่างมีประสิทธิภาพ พร้อมปกป้อง Arduino ไม่ให้เสียหาย
- มอเตอร์ DC: ให้การเคลื่อนไหวและทิศทางทางกายภาพกับหุ่นยนต์
- ฐานหุ่นยนต์ 2WD: โครงสร้างที่ใช้ติดตั้ง Arduino, สมาร์ทโฟน และแบตเตอรี่
- แบตเตอรี่ Li-Po 7.4V: สำคัญมากสำหรับการจ่ายไฟให้หุ่นยนต์เคลื่อนที่ได้เองแบบพกพา
ระบบการเคลื่อนที่และ Feedback Loop
หุ่นยนต์ที่ควบคุมด้วยกล้องนี้ออกแบบมาให้มีประสิทธิภาพสูง:
- ตั้งค่าฮาร์ดแวร์: ติดตั้งสมาร์ทโฟนและมอเตอร์ไดรเวอร์บนฐาน 2WD ให้ถูกต้อง แล้วเตรียมแอป Serial Sensor App ให้พร้อม
- ตั้งค่าการซิงค์ไฟสูง: ตรวจสอบให้แน่ใจว่ามอเตอร์ไดรเวอร์ได้รับไฟจากแบตเตอรี่ 7.4V โดยตรง
- ลูปการทำงาน: เริ่มโหมด "Choreo" ติดตามเส้นในแอป แล้วดูหุ่นยนต์เริ่มเดินทางได้เลย
- Feedback ภาพและเสียง: ดูการเคลื่อนไหวอัพเดทบนพื้นแบบเรียลไทม์ พร้อมเสียงบัซเซอร์ต้อนรับทุกครั้งที่ถึงจุดต่างๆ บนเส้นทาง สู้งานนะน้อง!
อนาคตที่รออยู่ (ถ้าน้องอยากจัดหนักขึ้น)
- เพิ่มหน้าจอ OLED ไว้โชว์ตัวตน: ติดจอ OLED เล็กๆ บนหุ่นยนต์ไว้โชว์แถบพลัง (life bar) แบบจัดเต็ม และคะแนน "ความน่าเชื่อถือของเส้นทาง (Path Reliability)" ของไลน์ฟอลโลว์เวอร์
- เพิ่มระบบควบคุมผ่านคลาวด์: สร้างแดชบอร์ดบนคลาวด์เฉพาะทาง เพื่อควบคุมและติดตามความคืบหน้าของหุ่นยนต์จากมือถือผ่าน WiFi ได้แบบเป๊ะๆ
- เพิ่มระบบปรับแต่งโปรไฟล์ความเร็วขั้นสูง: ใช้เซ็นเซอร์หลายตัว (เช่น อัลตราโซนิก) ให้หุ่นยนต์หลบสิ่งกีดขวางอัตโนมัติได้ ขณะที่ยังตามเส้นอยู่
- เพิ่มระบบรักษาความปลอดภัยแบบไบโอ: ต่อเซ็นเซอร์หลายตัว (เช่น PIR ตรวจจับการเคลื่อนไหว) ให้หุ่นยนต์ "ตื่น" และเริ่มทำงานตามเส้นก็ต่อเมื่อมีคนเข้ามาในสายตาเท่านั้น
โค้ดตัวอย่างและวิธีทำทั้งหมดอยู่ใน GitHub repo ของพี่เลย! ไปดูได้