INTRO
ว่าไงน้องๆ ทุกคน ยินดีต้อนรับเข้าสู่ช่องของพี่ วันนี้เราจะมาทำให้เซอร์โวมอเตอร์หมุนตามท่าทางมือของเรากัน โดยใช้ Python และแน่นอนว่า Arduino เป็นตัวช่วย ใช้คอมพิวเตอร์วิทัศน์ (Computer Vision) ติดตามการเคลื่อนไหวนิ้วมือ แล้วส่งข้อมูลไปให้ Arduino เพื่อสั่งให้มอเตอร์หมุนไปที่มุม 180 องศาเลยทีเดียว หลักการคือ เซอร์โวจะหมุนก็ต่อเมื่อเราชูนิ้วชี้ขึ้นมาแค่เดียว นิ้วอื่นๆ หุบไว้หมด งานแบบนี้เอาไปประยุกต์กับโปรเจคที่ใช้เซอร์โวหลายตัวก็ได้ แต่ในคลิปนี้เรามาลุยกับตัวเดียวก่อน
Project Overview
"Vision-Kinematics" นี่คือการนำ การวิเคราะห์ท่าทางมือ (Hand-Gesture Analytics) และ การควบคุมระบบแมคคาทรอนิกส์แบบอะซิงโครนัส (Asynchronous Mechatronic Orchestration) มาใช้อย่างจริงจังเลย ระบบนี้ใช้ไลบรารีคอมพิวเตอร์วิทัศน์บน Python ในการประมวลผลเฟรมวิดีโอ 2D เพื่อระบุจุดสำคัญบนมือ (hand-landmarks) 21 จุดแบบเรียลไทม์ ข้อมูลตำแหน่งเชิงพื้นที่นี้จะถูกประมวลให้เป็นเวกเตอร์ของท่าทางที่ชัดเจน—โดยเฉพาะการตรวจจับ "การชูนิ้วชี้"—ก่อนจะถูกส่งข้อมูลแบบอนุกรมไปยัง Arduino Uno ที่ทำหน้าที่เป็นศูนย์กลางลอจิก ระบบนี้ให้ความสำคัญกับความเร็วในการสื่อสารแบบอนุกรม (low-latency serial forensics), ฮิวริสติกส์ของจุดสำคัญจาก MediaPipe, และการประมาณค่า PWM ที่แม่นยำ (deterministic PWM-interpolation) เพื่อควบคุมเซอร์โว SG90 ให้ทำงานได้อย่างเที่ยงตรงสูงสุด
SERVO MOTOR
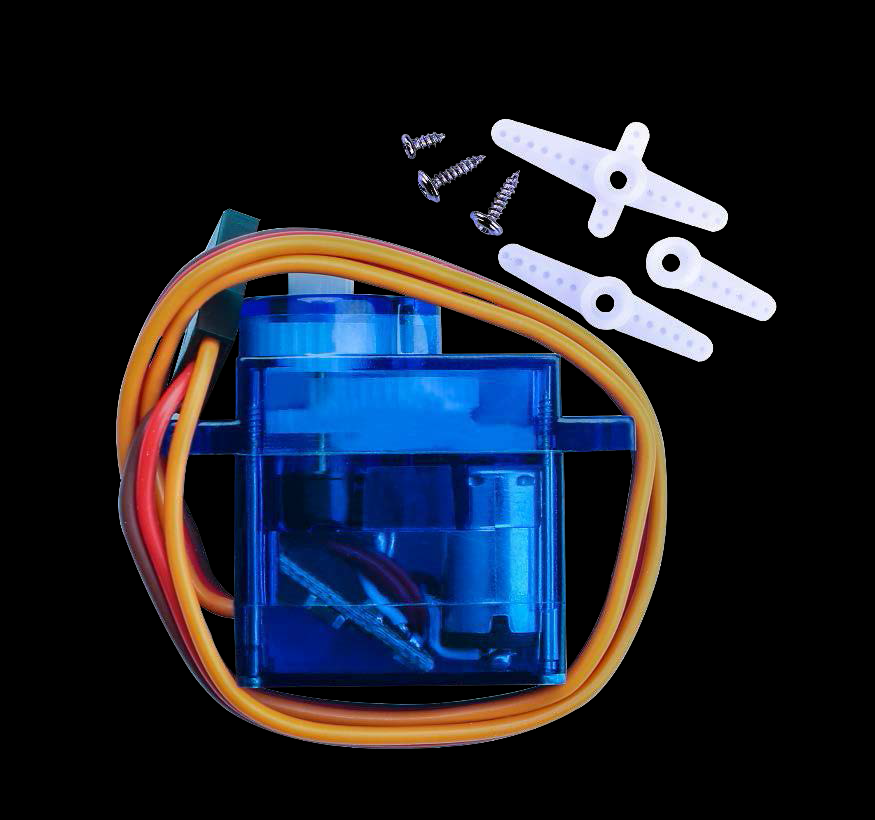
เซอร์โวเป็นมอเตอร์แบบมีเกียร์ที่หมุนได้แค่ 180 องศาเท่านั้น วิธีควบคุมคือส่งพัลส์ไฟฟ้าจากบอร์ด Arduino ไปให้มัน พัลส์พวกนี้จะบอกเซอร์โวว่าต้องหมุนไปที่ตำแหน่งไหน เซอร์โวมีสายไฟ 3 เส้น สีน้ำตาลคือกราวด์ (GND) ต้องต่อกับพอร์ต GND ของ Arduino สีแดงคือไฟเลี้ยง (VCC) ต้องต่อกับพอร์ต 5V และสีส้มคือสายสัญญาณ (Signal) ต้องต่อกับพินดิจิตอล #9
Technical Deep-Dive
- MediaPipe Forensics & Gesture-Vector Analytics:
- The 21-Point Landmark Diagnostics: ระบบวิทัศน์ใช้เฟรมเวิร์ก MediaPipe ในการแมปตำแหน่งมือ $(x, y, z)$ ในพื้นที่พิกัดที่ถูกปรับให้เป็นมาตรฐาน กระบวนการวิเคราะห์ (Forensics) เกี่ยวข้องกับการคำนวณระยะทางแบบยุคลิดระหว่างจุด
INDEX_FINGER_TIPและWRISTการวิเคราะห์ (Diagnostics) จะเน้นไปที่การระบุท่าทางแบบ "สถานะไบนารี" ซึ่งเซอร์โวจะถูกสั่งให้ทำงานที่ $180^{\circ}$ ก็ต่อเมื่อนิ้วชี้ยื่นออกมาเกินค่าขีดเริ่มต้น $(k)$ ที่กำหนดไว้ ในขณะที่นิ้วอื่นๆ ยังคงอยู่ในสถานะ "หุบ" อยู่ - Python-to-Arduino Serial Orchestration: ข้อมูลจะถูกส่งผ่านช่องทางการสื่อสารแบบอนุกรม (serial bridge) ที่ความเร็ว $9600 \text{ Baud}$ กระบวนการวิเคราะห์ (Forensics) เกี่ยวข้องกับการตรวจสอบความสมบูรณ์ของแพ็กเก็ตข้อมูล เพื่อให้แน่ใจว่าตัวอักษร '1' $(\text{actuate})$ หรือ '0' $(\text{reset})$ ที่ส่งไปนั้น ถูกอ่านเข้าไปในบัฟเฟอร์ UART ของ Arduino โดยไม่มีสัญญาณรบกวน (jitter) การวิเคราะห์ (Diagnostics) ใช้คำสั่ง
serial.read()แบบไม่บล็อกการทำงาน (non-blocking) เพื่อป้องกันไม่ให้ลูปการประมวลผลภาพของ Python ตกเฟรม
- The 21-Point Landmark Diagnostics: ระบบวิทัศน์ใช้เฟรมเวิร์ก MediaPipe ในการแมปตำแหน่งมือ $(x, y, z)$ ในพื้นที่พิกัดที่ถูกปรับให้เป็นมาตรฐาน กระบวนการวิเคราะห์ (Forensics) เกี่ยวข้องกับการคำนวณระยะทางแบบยุคลิดระหว่างจุด
- PWM-Servo Interpolation & Signal Integrity:
- The 50Hz Pulse-Width Modulation Harmonics: เซอร์โว SG90 ถูกควบคุมผ่านสัญญาณ PWM มาตรฐาน $50\text{Hz}$ ที่พิน $D9$ กระบวนการวิเคราะห์ (Forensics) เกี่ยวข้องกับการแมปความกว้างพัลส์ระหว่าง $544\mu\text{s}$ ถึง $2400\mu\text{s}$ ให้ตรงกับองศาการหมุนที่ต้องการ การวิเคราะห์ (Diagnostics) จะเน้นที่ "ความแข็งแรงของสัญญาณ (Signal-Stiffness)" เพื่อให้แน่ใจว่าการเปลี่ยนจาก $0^{\circ}$ ไป $180^{\circ}$ เกิดขึ้นด้วยแรงบิดสูงสุด ในขณะที่หลีกเลี่ยงการหมุนเลยจุดที่กำหนด (mechatronic overshoot)
- Power-Rail Stability Analytics: การทำงานของเซอร์โวอาจทำให้เกิดสไปค์กระแสสูงถึง $500\text{mA}$ ได้ กระบวนการวิเคราะห์ (Forensics) เกี่ยวข้องกับการเฝ้าติดตามเสถียรภาพของแรงดัน $5\text{V}$ บน Arduino ในระหว่างที่เซอร์โวหมุนด้วยความเร็วสูง เพื่อป้องกันไม่ให้เกิดการรีเซ็ตเนื่องจากไฟตก (brownout) บนตัวควบคุมหลัก
สรุปง่ายๆ เลยก็คือ หลังจากที่ Python ติดตามท่าทางมือ/นิ้วมือด้วยคอมพิวเตอร์วิทัศน์เสร็จ ถ้าตรวจพบท่าทางมือที่เราต้องการ เซอร์โวก็จะรับค่า 180 เป็นอินพุตจาก Python และนำไปใส่ในคำสั่ง `servo.write()` เพื่อสั่งให้มันหมุนนั่นเอง จัดไปวัยรุ่น!
วิศวกรรมและการนำไปใช้
- การวิเคราะห์ภาพด้วย OpenCV Matrix-Processing:
- การจัดการอัตราเฟรมภาพ (Visual Frame-Rate Orchestration): การทำงานเน้นที่การบาลานซ์ระหว่างความละเอียดภาพ $(640\times 480)$ กับความหน่วงในการประมวลผล (processing latency) ต้องวิเคราะห์และปรับแต่งเธรดของ
cv2.imshow()ให้ดี เพื่อให้ลูปแสดงผลภาพไม่ไปตีคอ (bottleneck) สัญญาณเอาท์พุตของระบบแมคคาทรอนิกส์ $(\text{FPS} > 30)$ - การกรองสัญญาณรบกวน (Noise-Filtering Heuristics): แสงสว่างในสภาพแวดล้อมอาจทำให้จุดแลนด์มาร์กกระตุกได้ (landmark jitter) ต้องใช้เทคนิคการกรองแบบชั่วคราว (temporal-smoothing filter) กับสถานะท่าทาง (gesture-state) เพื่อให้เซอร์โวไม่เกิดอาการ "ล่า" (hunting) หรือสั่นพึ่บพั่บเพราะสัญญาณรบกวนจากแสงชั่วขณะ
- การจัดการอัตราเฟรมภาพ (Visual Frame-Rate Orchestration): การทำงานเน้นที่การบาลานซ์ระหว่างความละเอียดภาพ $(640\times 480)$ กับความหน่วงในการประมวลผล (processing latency) ต้องวิเคราะห์และปรับแต่งเธรดของ
- ความแข็งแรงทางกลและการเชื่อมต่อ (Mechanical Integrity & Interconnect Logistics):
- การเชื่อมต่อโครงสร้างใช้สายจัมเปอร์มาตรฐาน ต้องตรวจสอบให้แน่ใจว่าจุดกราวด์ร่วม $(\text{GND})$ ระหว่าง Arduino กับกราวด์เพลนของพอร์ต USB คอมพิวเตอร์อ้างอิงกันถูกต้อง เพื่อรักษาความสมบูรณ์ของสัญญาณ (signal-integrity) ข้ามสะพานซีเรียลให้เป็นศูนย์โวลต์ (zero-potential) ไม่งั้นงานจะเพี้ยน ห้ามช็อตนะตัวนี้!
สรุป
Vision-Kinematics นี่แหละคือจุดสูงสุดของ Integrated AI-Mechatronics จัดไปวัยรุ่น! ด้วยการเชี่ยวชาญ MediaPipe Landmark Forensics และ Asynchronous Serial Orchestration ทำให้ได้อินเทอร์เฟซระดับโปรที่ทั้งแข็งแรงและแม่นยำ มันให้ความชัดเจนของการเคลื่อนไหว (kinetic clarity) ผ่านการวินิจฉัยด้วยภาพตอบกลับ (visual-feedback diagnostics) ที่ล้ำสมัยสุดๆ