โปรเจคจบ ป.ตรี วิศวกรรมสารสนเทศ
โปรเจคนี้คือหุ่นยนต์ไลน์ฟอลโลเวอร์ที่ออกแบบมาเพื่อหาทางออกที่สั้นที่สุดในเขาวงกต โดยใช้เทปสีดำบนพื้นสีขาว (ในโปรเจคเราใช้พื้นสีขาว) ข้อแตกต่างจากเขาวงกตทั่วไปคือ หุ่นยนต์ตัวนี้ต้องวิ่งบนเส้นทางที่มีทั้งโค้งและทางซิกแซกด้วย เป็นโปรเจคจบปริญญาตรีที่เสร็จสิ้นเมื่อเดือนกรกฎาคม 2014
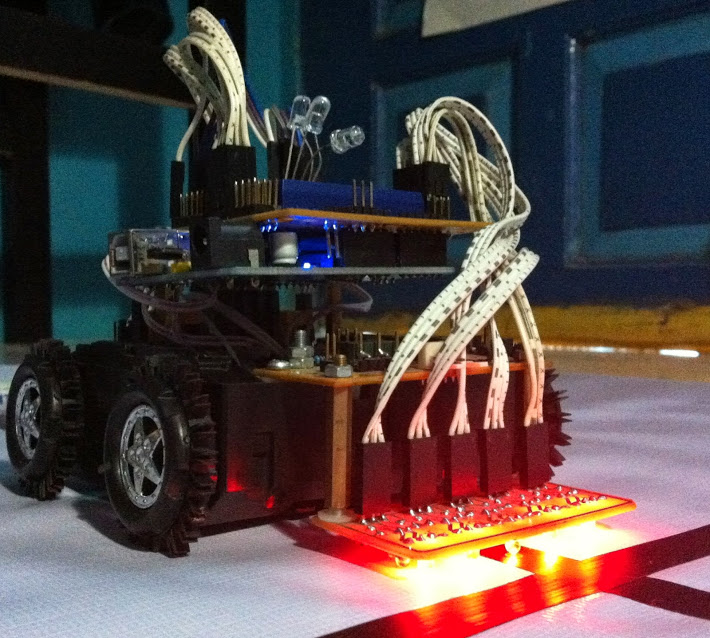
ภาพรวมโปรเจค
เจ้า "Maze-Runner Elite" นี่คือหุ่นยนต์ระดับเทพที่สร้างขึ้นมาเพื่อล่าดาวในสนาม Micromouse และการแก้เขาวงกตเส้น ต่างจากไลน์ฟอลโลเวอร์ธรรมดา เพราะมันทำงานเป็น 2 เฟสชัดเจน: เฟสสำรวจ (เพื่อนับทาง) และ เฟสเร่งสปีด (วิ่งทางลัดที่สั้นที่สุด) มันถูกออกแบบมาให้รับมือกับเส้นทางโค้งมนและซิกแซกได้ ซึ่งมักเป็นจุดอ่อนของหุ่นยนต์ที่ใช้ตรรกะแบบง่ายๆ
ลงลึกเรื่องเทคนิค
- อัลกอริทึมลดทอนเส้นทาง:
- ตรรกะจัดการสตริง: ในเฟสสำรวจ หุ่นยนต์จะบันทึกทุกการเลี้ยวเป็นสตริงข้อมูล (เช่น L = ซ้าย, R = ขวา, S = ตรง, B = ถอยหลัง/กลับหลังหัน)
- กระบวนการหาทางลัด: เฟิร์มแวร์จะวิเคราะห์สตริงเพื่อหา "ทางตัน" (B) ลำดับใดๆ ที่ลงท้ายด้วยการถอยหลังสามารถทำให้สั้นลงได้ เช่น ลำดับ
เลี้ยวซ้าย + ถอยหลัง + เลี้ยวซ้ายนั้นเทียบเท่ากับการเดินหน้าตรงๆ นั่นเอง โซลเวอร์จะลดทอนสตริงซ้ำๆ (เช่นLBL = S,LBS = R) จนเหลือแต่เส้นทางหลัก
- ควบคุมด้วย PID เพื่อให้โค้งเนียน:
- ติดตามค่าผิดพลาดแบบอนาล็อก: เพื่อรักษาความเร็วสูงบน เส้นทางโค้งและซิกแซก หุ่นยนต์ใช้ระบบควบคุมวงปิดแบบ Proportional-Integral-Derivative (PID)
- วงจรควบคุม: เซนเซอร์ 8 ตัวจะส่งค่ามาเป็นน้ำหนักบอกตำแหน่งของเส้นเทียบกับจุดศูนย์กลางของหุ่นยนต์ อัลกอริทึม PID จะคำนวณความเร็วที่แม่นยำสำหรับมอเตอร์แต่ละข้างให้ "กอดเส้น" ได้แน่น ลดการแกว่ง และป้องกันไม่ให้หุ่นยนต์ "หลุดเลน" ตอนวิ่งซิกแซกเร็วๆ
- การรวมข้อมูลเซนเซอร์และตรรกะสี่แยก:
- จัดการด้วย State Machine: หุ่นยนต์ต้องแยกให้ออกระหว่างโค้งธรรมดากับ ทางแยกตัวที หรือ สี่แยก ด้วยการตรวจสอบเซนเซอร์ทั้ง 8 ตัวพร้อมกัน เฟิร์มแวร์จะตรวจจับสถานะ "ดำทั้งหมด" หรือ "ขาวทั้งหมด" เพื่อเรียกใช้รูทีนจัดการทางแยก เช่น กฎ ให้เลี้ยวซ้ายก่อนเสมอ
วิศวกรรมและการนำไปใช้
- ระบบขับเคลื่อนแบบดิฟเฟอเรนเชียล:
- อัตราส่วนกำลังต่อน้ำหนัก: การใช้มอเตอร์เกียร์ขนาดเล็กแต่แรงบิดสูงคู่กับแบตเตอรี่ Li-Po น้ำหนักเบา ทำให้เร่งและเบรกได้ไว ซึ่งสำคัญมากเวลาจะเข้าโค้ง 90 องศาหลังจากวิ่งตรงมาไกล
- ประสิทธิภาพของฮาร์ดแวร์:
- ไดรเวอร์ TB6612FNG: เลือกใช้ไดรเวอร์แบบ MOSFET ตัวนี้แทน L298N แบบเก่า เพราะประสิทธิภาพสูงกว่าและกินพื้นที่น้อยกว่า ทำให้แม้จะวิ่งแก้เขาวงกตนานๆ ตัวมันก็ยังไม่ร้อนจัด
- การปรับเทียบและกำหนดขีดเริ่มต้น:
- ปรับตัวให้เข้ากับพื้นผิว: หุ่นยนต์มีรูทีนปรับเทียบอัตโนมัติตอนเริ่มทำงาน โดยกวาดเซนเซอร์ผ่านทั้งเทปดำและพื้นขาว เพื่อให้แน่ใจว่าข้อมูลดิบที่ส่งไปให้ PID นั้นถูกปรับให้เข้ากับสภาพแสงในห้องนั้นๆ แล้ว
นี่คือวิดีโอที่พี่อัพโหลดไว้
งานวิจัยเกี่ยวกับโปรเจคนี้ถูกตีพิมพ์ในงานประชุมวิชาการระดับนานาชาติ 2018 Seventh ICT International Student Project Conference (ICT-ISPC) เรียบร้อยแล้วนะน้อง
วันที่จัดงานประชุม: 11-13 กรกฎาคม 2018
วันที่เพิ่มลงใน IEEE Xplore: 8 พฤศจิกายน 2018
DOI: 10.1109/ICT-ISPC.2018.8523975
ผู้จัดพิมพ์: IEEE
สถานที่จัดงาน: นครปฐม, ประเทศไทย
งานนี้ผ่านการรีวิวจากเพื่อนร่วมวิชาชีพ (peer-reviewed) เรียบร้อย ใครอยากหาอ่านก็ลองเสิร์ชดูตามรายละเอียดด้านบนได้เลยจ้า
สรุปสั้นๆ ใส่ใจ
ในฐานะโปรเจคที่ผ่านการรีวิวและนำเสนอในงาน IEEE ICT-ISPC เจ้า Maze-Runner Elite ตัวนี้ถือเป็นตัวตั้งตัวตี (benchmark) สำหรับนวัตกรรมที่เกิดจากฝีมือนักเรียนนักศึกษาเลยนะ เน้นเรื่องการหาทางอัตโนมัติและการควบคุมการเคลื่อนที่ความเร็วสูง งานนี้จัดไปวัยรุ่น!