เสาอากาศ UHF หมุนได้แบบง่ายๆ (Simple antenna UHF rotator)
อุปกรณ์อิเล็กทรอนิกส์:
1x Arduino NANO V3,
1x L298N,
1x มอเตอร์ 12 V DC พร้อมเกียร์,
1x โพเทนชิออมิเตอร์แบบหมุนหลายรอบ (Linear Multi Rotation Potentiometer) (1 ถึง 10 kOhm),
1x LM35 (ตัวเลือกเสริม),
สาย USB สำหรับ Arduino Nano หรือ RS232 to TTL Converter.
ลูกปืน (Bearings):
2x 608Z (8x22x7 mm),
2x GE 30 ES 2RS (30x47x22 mm).
โปรไฟล์อลูมิเนียม: ขนาด 40x40 และ 20x20 มม.
ไปดูวิดีโอวิธีประกอบเจ้าโรเตอร์ตัวนี้กัน อย่าลืมกดติดตามช่อง YT ด้วยนะน้อง!
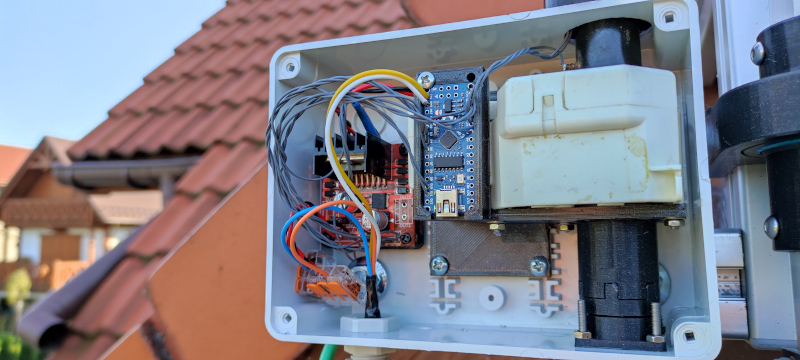
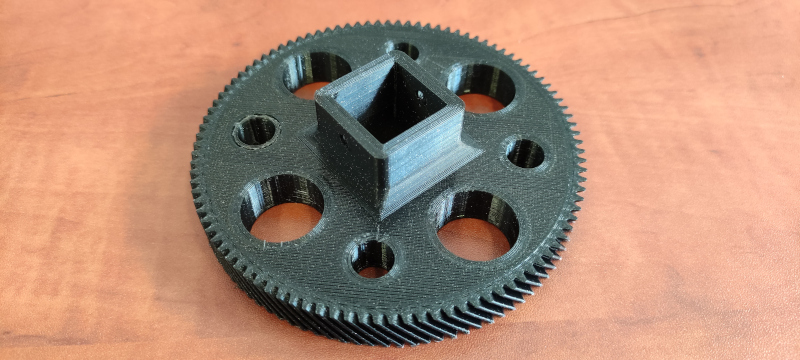
รูปประกอบบางส่วนจากขั้นตอนการประกอบ:


ระบบควบคุมระยะไกลแบบแม่เหล็กไฟฟ้า: โรเตอร์เสาอากาศ UHF
เสาอากาศ Wi-Fi ทั่วไปมันเป็นแบบรอบทิศทาง (Omnidirectional) คือกระจายสัญญาณอ่อนๆ ไปทุกทิศ แต่เสาอากาศวิทยุ UHF (Ultra High Frequency) แบบเกนสูงเนี่ย มันเป็นแบบมีทิศทาง (Directional) สุดๆ คือยิงสัญญาณแรงเป็นสิบกิโลได้ แต่แค่ในมุมแคบๆ เท่านั้น เจ้าโรเตอร์เสาอากาศ UHF แบบง่ายๆ ตัวนี้แหละ ที่จะช่วยบังคับให้เสาอากาศอลูมิเนียมยักษ์หันหน้าไปหาเป้าหมายที่เคลื่อนที่ได้แม่นยำ (เช่น สถานีอวกาศ ISS หรือโดรน) ด้วยระบบเซอร์โวที่ต้องคำนวณกันหน่อย
การกำหนดตำแหน่งแบบสัมบูรณ์ (Absolute Positioning)
ถ้าน้องสั่งเซอร์โวราคาถูกอย่าง SG90 ให้หันไป "90 องศา" มันก็จะหมุนไป 90 องศาจากตำแหน่งเริ่มต้นของมันเอง แต่ถ้าโดรนมันบินขึ้นเหนือไปล่ะ?
- สตรีมข้อมูลตำแหน่ง (Telemetry Stream): Arduino ของเราจะทำหน้าที่เป็นคอมพิวเตอร์ติดตามเป้า โดยมีแล็ปท็อปที่รันซอฟต์แวร์ติดตามวงโคจร (เช่น Gpredict สำหรับดาวเทียมสมัครเล่น) คอยบอกว่า "ตอนนี้ดาวเทียมอยู่ที่มุมทิศ (Azimuth) 270 (ตะวันตก) และมุมเงย (Elevation) 45 องศา"
- แล็ปท็อปจะส่งข้อมูลนี้ผ่านพอร์ตอนุกรม (Serial) มายัง Arduino
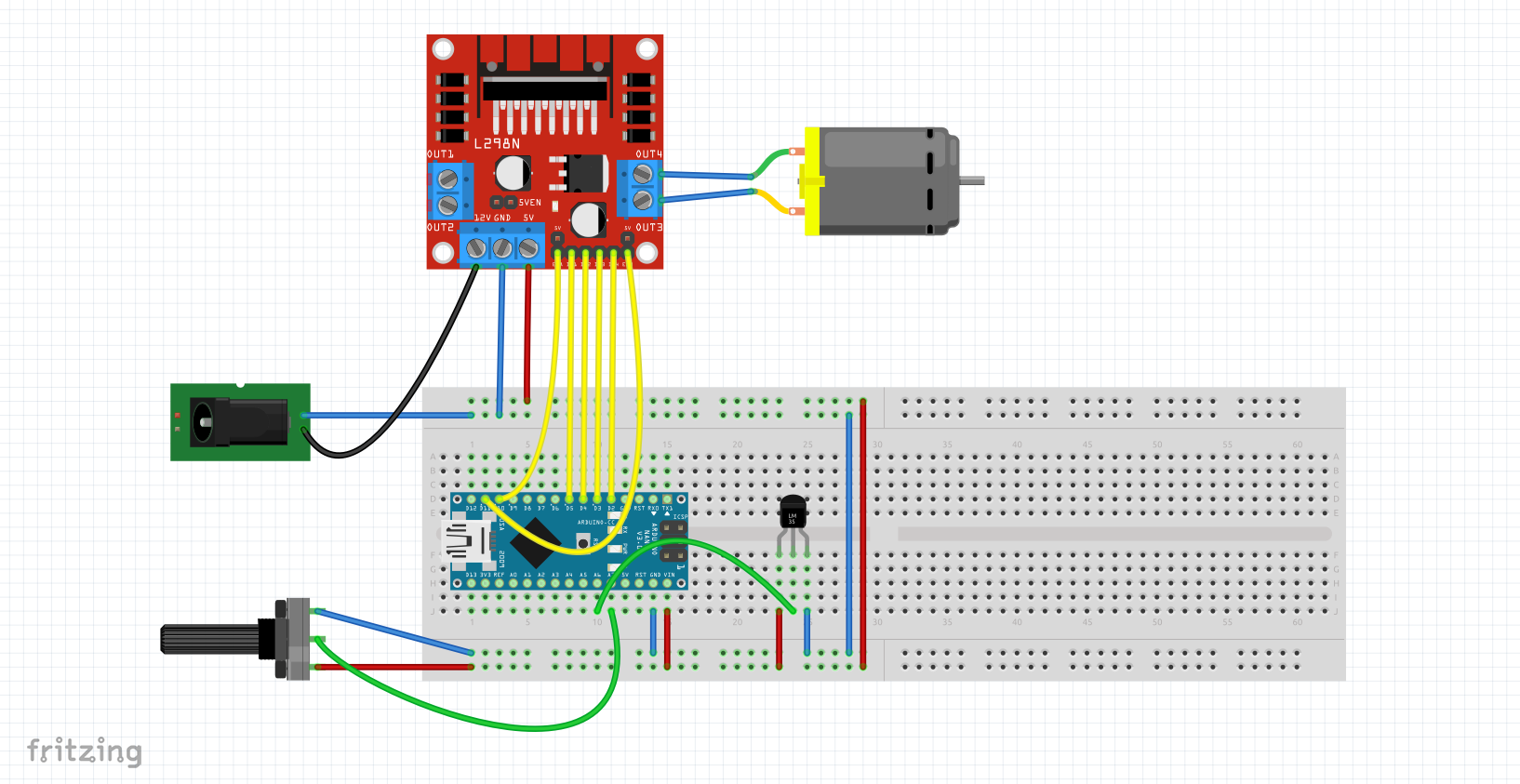
- Arduino ก็จะสั่งงานมอเตอร์ผ่านไดรเวอร์ L298N ให้หมุนฐานโรเตอร์แนวนอนไปยังตำแหน่ง 270 องศาพอดี
- โพเทนชิออมิเตอร์แบบหมุนหลายรอบ (Linear Multi Rotation Potentiometer) จะทำหน้าที่ส่งข้อมูลตำแหน่งจริงกลับมาให้ Arduino เพื่อให้มั่นใจว่าเสาอากาศหยุดหมุนตรงตำแหน่งที่สั่งไว้เป๊ะๆ ห้ามช็อตนะตัวนี้!
สู้กับแรงลม (Combating Wind Load)
อย่าใช้ชิ้นส่วนพลาสติกจิ๋วๆ นะตัวนี้! เสาอากาศตัวใหญ่เนี่ย มันเหมือนว่าวโลหะยักษ์เวลาเจอลม 20mph เลย
- มอเตอร์ไดรเวอร์ (Motor Driver): Arduino ของเราใช้ L298N H-Bridge Driver ในการควบคุมมอเตอร์เกียร์ DC 12V ตัวทรงพลัง
- ต้องเขียนโปรแกรมควบคุมมอเตอร์ให้มี แรงบิดค้าง (holding torque) ตอนที่เสาอากาศหยุดนิ่งด้วย เพื่อล็อกตำแหน่งเสาอากาศให้สู้กับแรงลมได้ทางกายภาพ ระบบเกียร์ที่เห็นในรูปประกอบเนี่ย มันช่วยเพิ่มข้อได้เปรียบเชิงกล (mechanical advantage) ให้พอต้านแรงพวกนี้ได้
อุปกรณ์กลไกเฉพาะทาง (Specialized Mechanical Hardware)
โครงสร้างกลไกที่แข็งแรงเป็นสิ่งสำคัญสุดๆ สำหรับความมั่นคง:
- Arduino Nano: ตัวควบคุมหลัก
- L298N Motor Driver: ควบคุมมอเตอร์เกียร์ DC แรงบิดสูง
- โพเทนชิโอมิเตอร์แบบหมุนหลายรอบ (Linear Multi Rotation Potentiometer): ใช้ตรวจจับตำแหน่งแบบสัมบูรณ์ (absolute position sensing)
- ตลับลูกปืนกันฝุ่นรุ่นหนัก (Heavy-Duty Bearings - 608Z & GE 30 ES): รับประกันการหมุนลื่นไหลแม้มีแรงกด ดูลิงค์รูปตลับลูกปืนทรงกลมและคลัตช์ได้
- โปรไฟล์อลูมิเนียม (40x40 และ 20x20 มม.): เป็นโครงสร้างหลักและตัวเรือนที่แข็งแรงทนทาน
ดาวน์โหลดไฟล์โปรเจคทั้งหมดได้ที่นี่
เสาอากาศ LPDA สำหรับแบนด์ 2m / 70 cm ถูกติดตั้งบนโรเตอร์
แอปพลิเคชันควบคุมรันบนคอมพิวเตอร์ Linux แต่น้องก็รันบน Windows ได้ง่ายๆ นะ แค่จำไว้ว่าต้องเปลี่ยนการตั้งค่าพอร์ตสื่อสาร (communication port settings) ด้วยล่ะ
VY73 de SP9MX!