อยากสร้างเล้าไก่สมาร์ท ที่สามารถเปิด/ปิดประตูได้ ทำความสะอาดพื้น นับและชั่งน้ำหนักสัตว์ปีก เพื่อลดภาระงานหนักของแม่ให้ได้บ้าง ตอนเด็กๆ แม่เคยสร้างเล้าเล็กๆ เลี้ยงไก่ข้างบ้าน ปล่อยไก่ทุกเช้า ตกเย็นก็เรียกกลับเล้าด้วยการร้องเรียกและโปรยข้าว แล้วก็ไล่ต้อนเข้าเล้า... ภาพเหล่านี้ฝังใจมาจนโต
แต่เดี๋ยวนี้คนในหมู่บ้านเริ่มน้อยลงเพราะคนย้ายเข้าเมือง ตัวพี่เองก็ย้ายเข้ามาในเมืองเหมือนกัน แต่ไม่เคยเจอไก่รสชาติอร่อยเหมือนสมัยก่อนอีกเลย อาจจะเป็นเพราะการเลี้ยงแบบหนาแน่นสูงก็ได้ ยังไงก็ตาม พี่คิดว่าโมเดลการเลี้ยงแบบปล่อยอิสระ (Free-range) แบบเดิมนั้นดีมาก และเราสามารถคัดลอกและขยายโมเดลนี้ได้ด้วยการสร้างเล้าไก่สมาร์ทขึ้นมา
งานพื้นฐานคือเปิด/ปิดประตู ทำความสะอาดพื้น ส่วนฟีเจอร์อื่นๆ จะพัฒนาต่อไปทีหลัง นอกจากนี้เรายังต้องตั้งเวลาให้งานต่างๆ ทำงานเองได้ โดยส่งคำสั่งจากคลาวด์ IoT
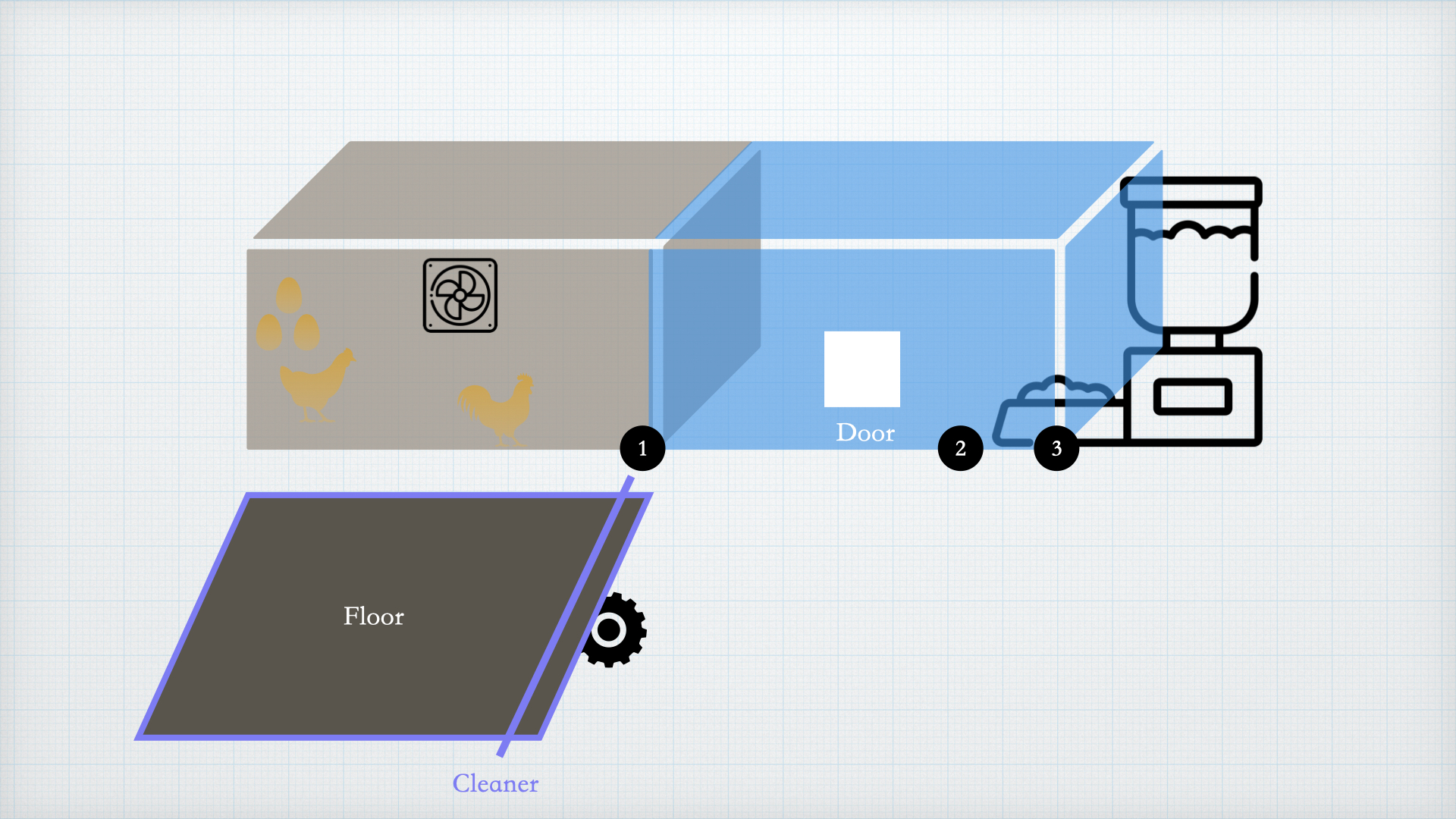
กล่องสีฟ้านี่คือกรงจริงๆ นะ น้องไก่จะเข้าไปในนั้นได้ตอนที่พื้นเลื่อนไปสุดทางแล้ว จากนั้นก็จะได้กินอาหารและออกไปเดินเล่นได้อย่างอิสระเมื่อประตูเปิด
ลงลึกเรื่องเทคนิค: ระบบประตู 4 ทิศทางและการควบคุมเซอร์โว
- กลไกเปิด/ปิดประตู
ใช้เซอร์โวมอเตอร์ 2 ตัว เพื่อสร้างประตู 4 ทิศทาง ซึ่งสามารถปิดได้, ให้เข้าแต่ห้ามออก, ให้ออกแต่ห้ามเข้า, หรือเข้าออกได้ทั้งคู่ เมื่อเซอร์โวมอเตอร์หมุนไป 0 องศาหมายถึงปิด, 90 องศาหมายถึงเปิด มอเตอร์สองตัวรวมกันให้สถานะ 4 แบบ เช่น 00, 01... พี่คิดว่าทำความสะอาดจะง่ายขึ้นถ้าไม่มีสัตว์ปีกอยู่ในเล้า และสะดวกกว่าถ้าพอมืดแล้วไก่สามารถเข้าเล้าได้แต่ห้ามออกไปข้างนอกอีก
- การวินิจฉัยลอจิก 4 สถานะ: ระบบประตูใช้เซอร์โว 9g สองตัวเพื่อสร้างโหมดการทำงานที่แตกต่างกัน 4 แบบ การตรวจสอบเกี่ยวข้องกับการแมปสถานะมุม $(S_1, S_2)$:
00(ปิดล็อค),01(เข้าได้อย่างเดียว),10(ออกได้อย่างเดียว), และ11(ปล่อยอิสระ)การควบคุมนี้ช่วยให้สามารถล็อคเล้าอัตโนมัติตอนเย็นได้ ในขณะที่ยังอนุญาตให้ไก่ที่กลับดึกสามารถเข้าเขตความปลอดภัยทางชีวภาพได้ - การวิเคราะห์การเคลื่อนที่ของเซอร์โว: การตรวจสอบจะติดตามสัญญาณ PWM ที่ส่งไปยังเซอร์โว Feetech เพื่อให้แน่ใจว่าการเปลี่ยนมุม $(0-90)$ องศาดำเนินการด้วยแรงบิดที่เพียงพอที่จะเอาชนะแรงเสียดทานทางกล โดยไม่ทำให้ลอจิกเรลของ Nano ESP32 หยุดทำงาน
- การวินิจฉัยลอจิก 4 สถานะ: ระบบประตูใช้เซอร์โว 9g สองตัวเพื่อสร้างโหมดการทำงานที่แตกต่างกัน 4 แบบ การตรวจสอบเกี่ยวข้องกับการแมปสถานะมุม $(S_1, S_2)$:
ลงลึกเรื่องเทคนิค: ฟีดแบ็คตำแหน่งและระบบทำความสะอาดพื้น
- กลไกทำความสะอาด
ใช้มอเตอร์ DC เพื่อเลื่อนพื้นจากซ้าย (ตำแหน่ง 1) ไปขวา (ตำแหน่ง 3) น้องอาจสังเกตเห็นตำแหน่งกลางคือตำแหน่ง 2 เมื่อพื้นเลื่อนไปที่ตำแหน่ง 2 สัตว์ปีกจะไม่สามารถกินอาหารในเล้าได้และต้องออกไปหาอาหารข้างนอก เช่น กินแมลงศัตรูพืช ดังนั้นพี่เลยทำโพเทนชิโอมิเตอร์แบบง่ายๆ ขึ้นมาเอง โดยใช้พินเดียว
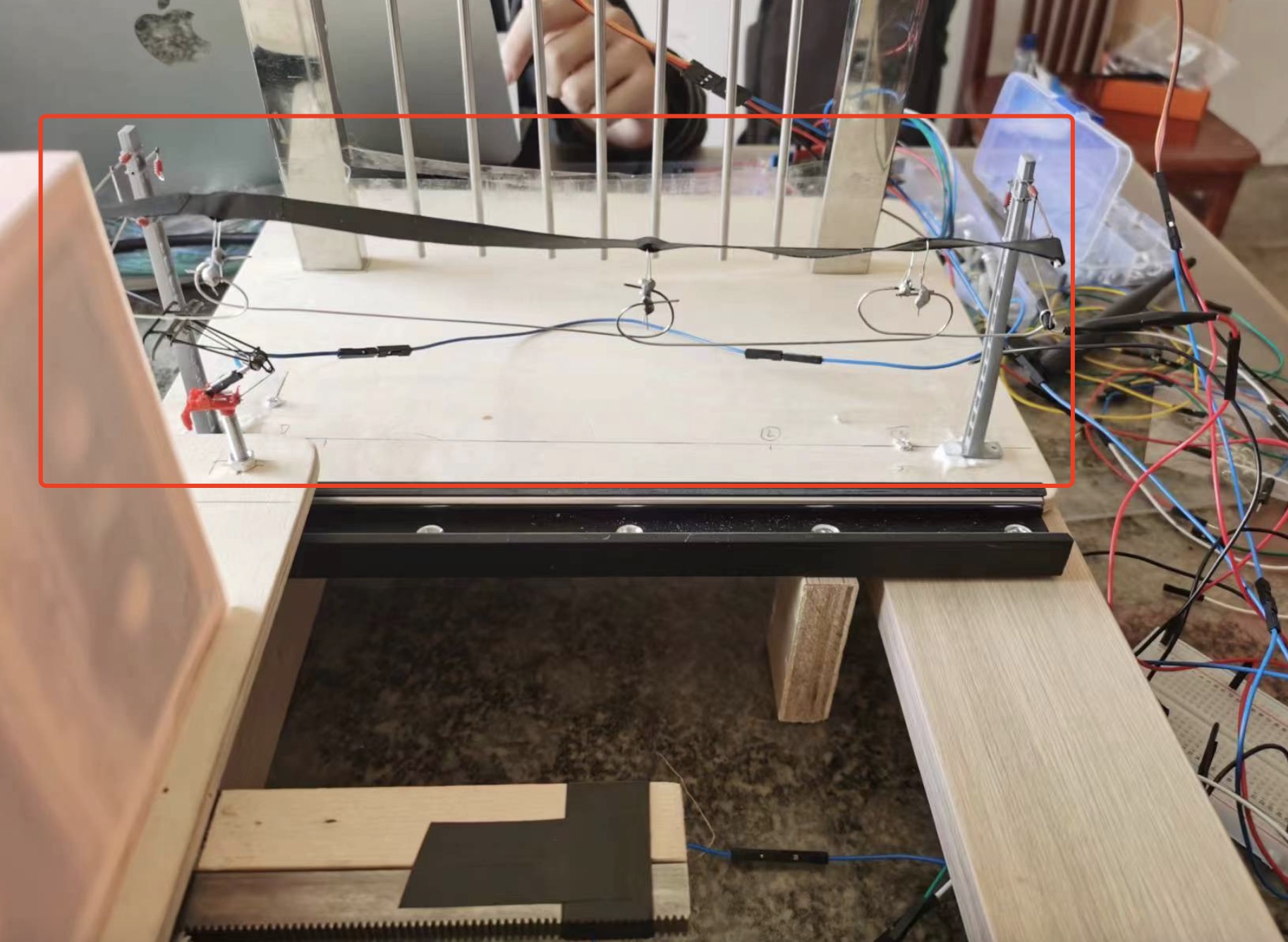
- การวินิจฉัยตำแหน่งด้วย Linear Potentiometer: เพื่อจัดการกับตัวทำความสะอาดพื้นแบบเลื่อน โครงการนี้มีโพเทนชิโอมิเตอร์แบบเส้นที่ทำขึ้นเองดังรูปด้านล่าง การตรวจสอบเกี่ยวข้องกับการอ่านค่าแรงดันไฟฟ้าแบบแอนะล็อกที่มีความละเอียดสูงตลอดเส้นทางการเลื่อน การวินิจฉัยจะระบุพิกัดเชิงพื้นที่ 3 ตำแหน่งที่ชัดเจน $(P_1: \text{ให้อาหาร}, P_2: \text{จำกัดการเข้าถึง}, P_3: \text{ทำความสะอาด})$ ทำให้สามารถหยุดการทำงานของมอเตอร์ DC ได้อย่างแม่นยำ
- การควบคุมแรงบิดของมอเตอร์ BLDC: กลไกการเลื่อนพื้นขับเคลื่อนโดยมอเตอร์ BLDC การตรวจสอบจะมุ่งเน้นไปที่การจัดการกระแสสูงชั่วขณะที่จำเป็นในการเคลื่อนย้ายมวลของพื้น โดยใช้ลอจิกเอนจินความเร็วสูงของ ESP32 เพื่อป้องกันไม่ให้เกิดการติดขัดทางกล
วิศวกรรมและการนำไปใช้: IoT-Cloud Telemetry & Scheduling Heuristics
- จัดตารางงาน (Schedule Tasks)
เราต้องการให้ประตูเปิดตอน 7 โมงเช้า, ทำความสะอาดพื้นตอน 8 โมง...ดังนั้นเราต้องมีระบบสำหรับจัดตารางให้งานต่างๆ ทำงานในเวลาที่กำหนดและวนซ้ำทุกวัน พี่ได้สร้างคำสั่งบางอย่างขึ้นมา ตามภาพด้านล่างนี้:
- การวิเคราะห์ลำดับคำสั่งจากระยะไกล (Remote-Command Serialization Forensics): ระบบจะรับสตริงคำสั่งที่ซับซ้อนพร้อมประทับเวลาผ่าน IoT Cloud $(\text{เช่น } \text{2023-12-01.../101-06:30...})$ การวิเคราะห์นี้เกี่ยวข้องกับการแยกสตริงเหล่านี้ออกเป็นอาร์เรย์ซ้อนของทริกเกอร์เมคคาทรอนิกส์ ซึ่งทำให้โรงเรือนสามารถดำเนินวงจรงานอัตโนมัติ "งานประจำ" ตลอด 24 ชั่วโมงได้โดยไม่ต้องมีคนคอยสั่ง
- ความสมบูรณ์ของลอจิกที่ซิงค์กับนาฬิกาจริง (RTC-Synchronized Logic Integrity): ด้วยการใช้ Real-Time Clock $(RTC)$ ภายในของ ESP32 ที่ซิงโครไนซ์กับเซิร์ฟเวอร์ NTP ระบบรับประกันได้ว่าการเปิด-ปิดประตูโรงเรือนจะเกิดขึ้นด้วยความแม่นยำระดับเสี้ยววินาที ซึ่งสำคัญมากสำหรับการปล่อยไก่ตอนเช้าและการป้องกันสัตว์นักล่าตอนเย็น
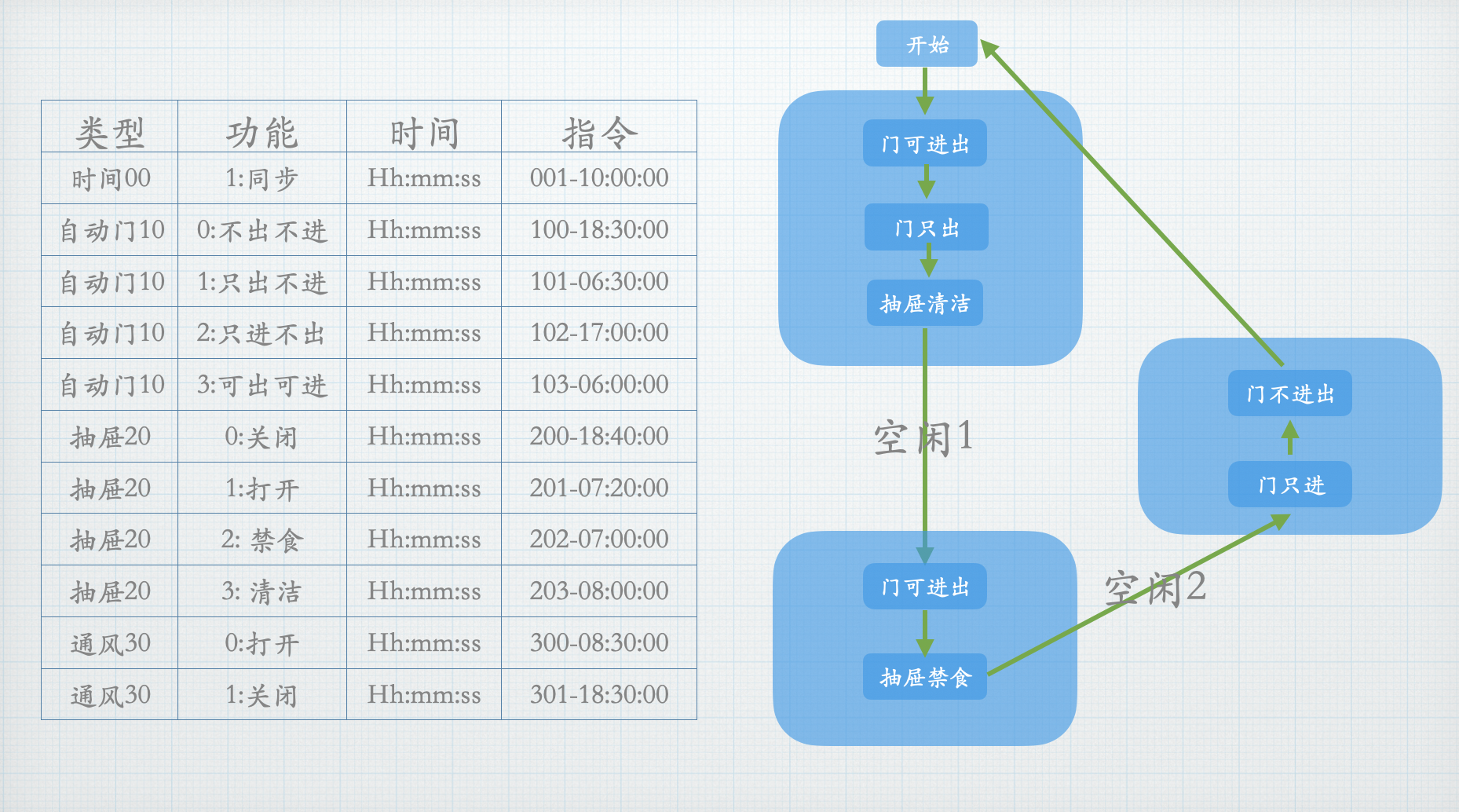
ตัวอย่างคำสั่งที่มีเวอร์ชันคือ:
2023-12-01-01-0:103-06:00:00/101-06:30:00/202-07:00:00/203-07:20:00/103-07:30:00/102-17:00:00/100-18:00:00;
การเสริมความแข็งแรงเชิงโครงสร้างเมคคาทรอนิกส์ (Structural Mechatronic Hardening)
- โครงสร้างนี้ใช้สายไฟหลัก 12V แล้วลดระดับแรงดันลงสำหรับวงจรลอจิก การตรวจสอบความสมบูรณ์ของการเดินสายไฟและจุดบัดกรีช่วยให้แน่ใจว่าโหนดเกษตรกรรมนี้ยังคงทำงานได้ในสภาพแวดล้อมที่มีฝุ่นและการสั่นสะเทือนสูง ซึ่งเป็นเรื่องปกติของโรงเรือนสัตว์ปีกที่ใช้งานจริง
สรุป
ก็อย่างที่เห็นน้องครับ มันเป็นแค่ต้นแบบง่ายๆ ที่ยังใช้งานจริงจังไม่ได้ มีอีกหลายอย่างต้องทำ พี่จะรีบพัฒนาต่อให้ดีที่สุด ASAP เลย Coop-IoT นี่ถือเป็นสุดยอดของ เครื่องมือวัดในฟาร์มอัจฉริยะ (Smart-Farm Instrumentation) เลยนะ การที่เราควบคุม การวิเคราะห์ประตูเมคคาทรอนิกส์ (Mechatronic Gate Forensics) และ การวินิจฉัยตารางงานที่ซิงค์กับคลาวด์ (Cloud-Synchronized Scheduling Diagnostics) ได้ โครงการนี้ก็จะส่งมอบเครื่องมือทางการเกษตรระดับมืออาชีพที่ขยายขนาดได้ โดยยังคงเคารพโมเดลการทำฟาร์มดั้งเดิมผ่านความแม่นยำของ IoT สมัยใหม่
Autonomous Aviary: Mastering agricultural telemetry through mechatronic forensics.